







MuJoCo Lec9
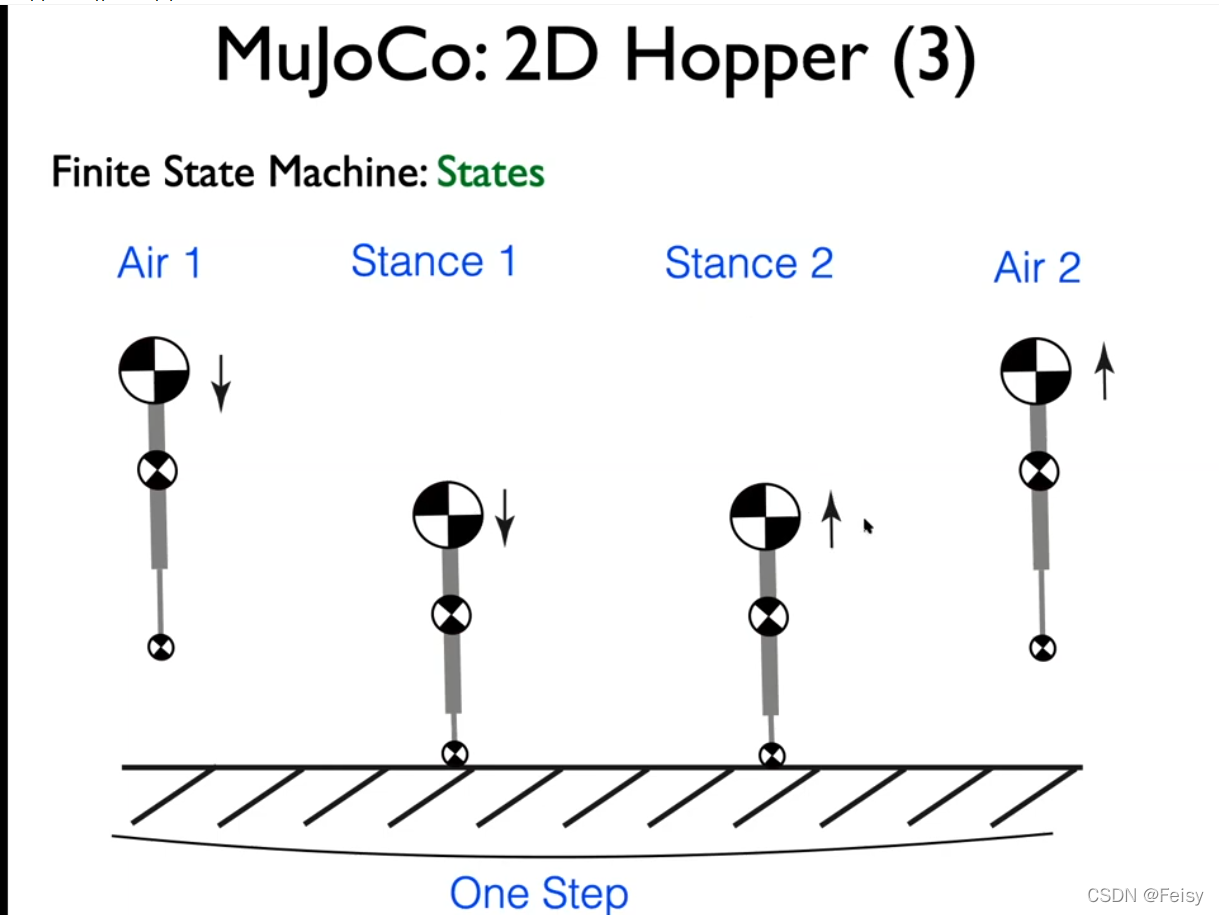
hopper的状态机控制
pos servo,vel servo 组合的作用
- pos的增益有,vel的增益为0时,pos servo表现为在目标位置来回运动,好像弹簧的效果一样
Mujoco的auctor在目标位置震荡的演示
- pos的增益和vel的增益都有,就是PD控制,从而快速的到达目标位置并停下来
//all actions
if (fsm == fsm_air1)
{
//落下状态,这里pos servo,vel servo的设置是为了让pos servo迅速停停下来
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,100);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,10);
//d->ctrl[0] = 0;
}
if (fsm == fsm_stance1)
{
//if (fsm==fsm_air1 && z_foot < 0.05 )
//{
//fsm = fsm_stance1;
//printf("fsm_stance1 \n");
//}
//vel的参数设0,同时增大pos servo的参数,这样auctor会在目标点附近来回摆动
//从而产生抗压缩的作用
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,1000);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,0);
}
if (fsm == fsm_stance2)
{
//if (fsm== fsm_stance1 && vz_torso > 0)
//{
//fsm = fsm_stance2;
//printf("fsm_stance2 \n");
//}
//这里如果跟stance1一样的话,系统的能量会衰减比较厉害,大概30步会停下来
//增大一点,相当于给系统注入多一点能量,不要那么快停下来
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,1050);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,0);
这里是顺时针旋转,这样子整个hopper是往前倾,从而底部的auctor产生
//产生的力变为斜向上,以达到向前的目的
d->ctrl[0] = -0.2;
}
if (fsm == fsm_air2)
{
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,100);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,10);
d->ctrl[0] = 0;//将脚的姿态恢复成垂直
}
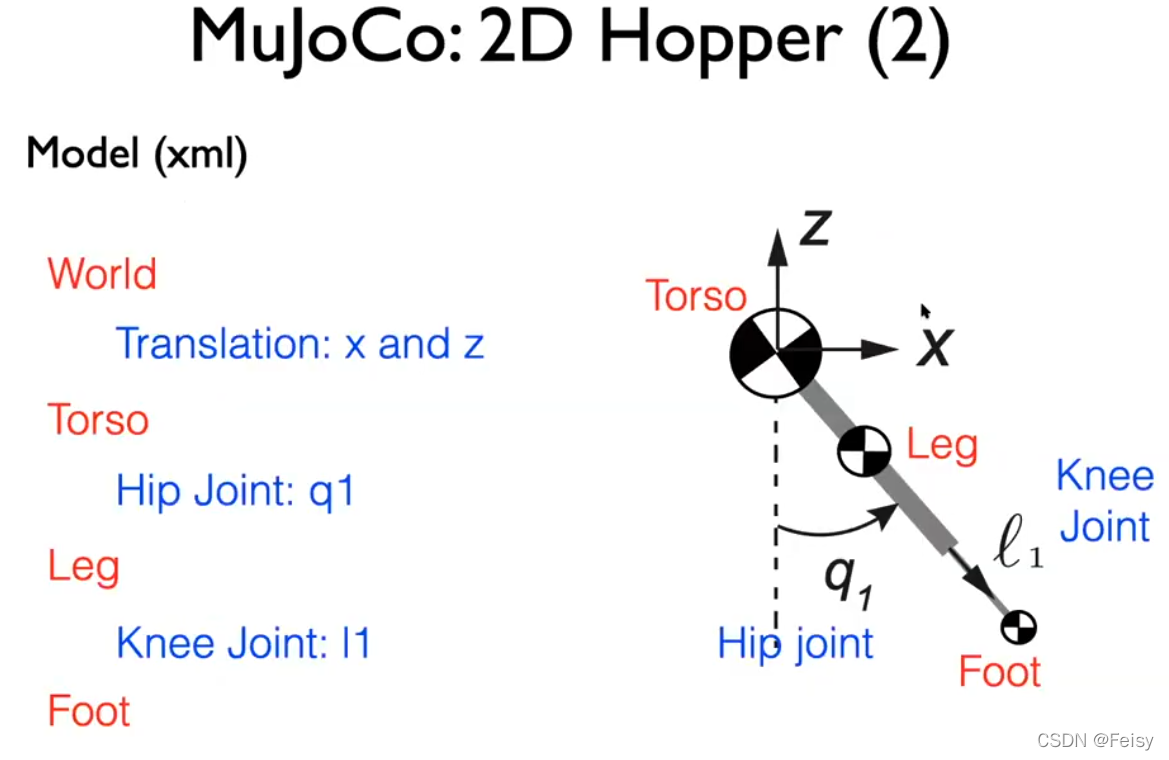
模型xml
<mujoco>
<visual>
<headlight ambient="0.5 0.5 0.5"/>
</visual>
<option timestep="0.001" integrator="RK4" gravity="0 0 -9.81">
<flag sensornoise="disable" contact="enable" energy="enable"/>
</option>
<worldbody>
<!-- <light diffuse=".5 .5 .5" pos="0 0 3" dir="0 0 -1"/> -->
<!-- <light mode="targetbody" target="torso" /> -->
<geom type="plane" size="100 1 0.1" rgba=".9 0 0 1"/>
<body name="torso" pos="0 0 2">
<joint name="x" type="slide" pos="0 0 0" axis="1 0 0" />
<joint name="z" type="slide" pos="0 0 0" axis="0 0 1" />
<geom type="sphere" size="0.1" rgba=".9 .9 .9 1" mass="1"/>
<body name="leg" pos="0 0 -0.5" euler="0 0 0">
<joint name="hip" type="hinge" pos="0 0 0.5" axis="0 -1 0" />
<geom type="cylinder" size=".05 .5" rgba="0 .9 0 1" mass="1"/>
<body name="foot" pos="0 0 -0.75">
<joint name="knee" type="slide" pos="0 0 0.25" axis="0 0 -1" />
<geom type="cylinder" pos="0 0 0.125" size=".01 .125" rgba="0 0 .9 1" mass="0"/>
<geom type="sphere" size="0.05" rgba=".9 .9 0 1" mass="0.1"/>
</body>
</body>
</body>
</worldbody>
<actuator>
<position name="pservo-hip" joint="hip" kp="0"/>
<velocity name="vservo-hip" joint="hip" kv="0"/>
<position name="pservo-knee" joint="knee" kp="0"/>
<velocity name="vservo-knee" joint="knee" kv="0"/>
</actuator>
</mujoco>
控制代码
#include<stdbool.h> //for bool
//#include<unistd.h> //for usleep
//#include <math.h>
#include "mujoco.h"
#include "glfw3.h"
#include "stdio.h"
#include "stdlib.h"
#include "string.h"
//simulation end time
double simend = 50;
int fsm;
#define fsm_air1 0
#define fsm_stance1 1
#define fsm_stance2 2
#define fsm_air2 3
int step_no;
//related to writing data to a file
FILE *fid;
int loop_index = 0;
const int data_frequency = 10; //frequency at which data is written to a file
// char xmlpath[] = "../myproject/template_writeData/pendulum.xml";
// char datapath[] = "../myproject/template_writeData/data.csv";
//Change the path <template_writeData>
//Change the xml file
char path[] = "../myproject/hopper/";
char xmlfile[] = "hopper.xml";
char datafile[] = "data.csv";
// MuJoCo data structures
mjModel* m = NULL; // MuJoCo model
mjData* d = NULL; // MuJoCo data
mjvCamera cam; // abstract camera
mjvOption opt; // visualization options
mjvScene scn; // abstract scene
mjrContext con; // custom GPU context
// mouse interaction
bool button_left = false;
bool button_middle = false;
bool button_right = false;
double lastx = 0;
double lasty = 0;
// holders of one step history of time and position to calculate dertivatives
mjtNum position_history = 0;
mjtNum previous_time = 0;
// controller related variables
float_t ctrl_update_freq = 100;
mjtNum last_update = 0.0;
mjtNum ctrl;
// keyboard callback
void keyboard(GLFWwindow* window, int key, int scancode, int act, int mods)
{
// backspace: reset simulation
if( act==GLFW_PRESS && key==GLFW_KEY_BACKSPACE )
{
mj_resetData(m, d);
mj_forward(m, d);
}
}
// mouse button callback
void mouse_button(GLFWwindow* window, int button, int act, int mods)
{
// update button state
button_left = (glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_LEFT)==GLFW_PRESS);
button_middle = (glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_MIDDLE)==GLFW_PRESS);
button_right = (glfwGetMouseButton(window, GLFW_MOUSE_BUTTON_RIGHT)==GLFW_PRESS);
// update mouse position
glfwGetCursorPos(window, &lastx, &lasty);
}
// mouse move callback
void mouse_move(GLFWwindow* window, double xpos, double ypos)
{
// no buttons down: nothing to do
if( !button_left && !button_middle && !button_right )
return;
// compute mouse displacement, save
double dx = xpos - lastx;
double dy = ypos - lasty;
lastx = xpos;
lasty = ypos;
// get current window size
int width, height;
glfwGetWindowSize(window, &width, &height);
// get shift key state
bool mod_shift = (glfwGetKey(window, GLFW_KEY_LEFT_SHIFT)==GLFW_PRESS ||
glfwGetKey(window, GLFW_KEY_RIGHT_SHIFT)==GLFW_PRESS);
// determine action based on mouse button
mjtMouse action;
if( button_right )
action = mod_shift ? mjMOUSE_MOVE_H : mjMOUSE_MOVE_V;
else if( button_left )
action = mod_shift ? mjMOUSE_ROTATE_H : mjMOUSE_ROTATE_V;
else
action = mjMOUSE_ZOOM;
// move camera
mjv_moveCamera(m, action, dx/height, dy/height, &scn, &cam);
}
// scroll callback
void scroll(GLFWwindow* window, double xoffset, double yoffset)
{
// emulate vertical mouse motion = 5% of window height
mjv_moveCamera(m, mjMOUSE_ZOOM, 0, -0.05*yoffset, &scn, &cam);
}
//****************************
//This function is called once and is used to get the headers
void init_save_data()
{
//write name of the variable here (header)
fprintf(fid,"t, ");
//Don't remove the newline
fprintf(fid,"\n");
}
//***************************
//This function is called at a set frequency, put data here
void save_data(const mjModel* m, mjData* d)
{
//data here should correspond to headers in init_save_data()
//seperate data by a space %f followed by space
fprintf(fid,"%f ",d->time);
//Don't remove the newline
fprintf(fid,"\n");
}
/******************************/
void set_torque_control(const mjModel* m,int actuator_no,int flag)
{
if (flag==0)
m->actuator_gainprm[10*actuator_no+0]=0;
else
m->actuator_gainprm[10*actuator_no+0]=1;
}
/******************************/
/******************************/
void set_position_servo(const mjModel* m,int actuator_no,double kp)
{
m->actuator_gainprm[10*actuator_no+0]=kp;
m->actuator_biasprm[10*actuator_no+1]=-kp;
}
/******************************/
/******************************/
void set_velocity_servo(const mjModel* m,int actuator_no,double kv)
{
m->actuator_gainprm[10*actuator_no+0]=kv;
m->actuator_biasprm[10*actuator_no+2]=-kv;
}
/******************************/
//**************************
void init_controller(const mjModel* m, mjData* d)
{
int actuator_no;
actuator_no = 0; //pservo-hip
set_position_servo(m,actuator_no,100);
actuator_no = 1; //vservo-hip
set_velocity_servo(m,actuator_no,10);
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,1000);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,0);
fsm = fsm_air1;
step_no = 0;
}
//**************************
void mycontroller(const mjModel* m, mjData* d)
{
//write control here
//Get data for transitions
int body_no;
int actuator_no;
// body_no = 3;
// printf("foot pos: %f %f %f \n", d->xpos[3*body_no + 0],d->xpos[3*body_no + 1],d->xpos[3*body_no + 2]);
// printf("z velocity torso: %f \n",d->qvel[1]);
// printf("********* \n");
//all transitions
body_no = 3;
double z_foot = d->xpos[3*body_no + 2];
double vz_torso = d->qvel[1];
if (fsm==fsm_air1 && z_foot < 0.05 )
{
fsm = fsm_stance1;
//printf("fsm_stance1 \n");
}
if (fsm== fsm_stance1 && vz_torso > 0)
{
fsm = fsm_stance2;
//printf("fsm_stance2 \n");
}
if (fsm==fsm_stance2 && z_foot>0.05)
{
fsm = fsm_air2;
//printf("fsm_air2 \n");
}
if (fsm==fsm_air2 && vz_torso < 0)
{
fsm = fsm_air1;
//printf("fsm_air1 \n");
step_no += 1;
printf("step no = %d \n",step_no);
}
//all actions
if (fsm == fsm_air1)
{
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,100);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,10);
//d->ctrl[0] = 0;
}
if (fsm == fsm_stance1)
{
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,1000);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,0);
}
if (fsm == fsm_stance2)
{
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,1050);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,0);
d->ctrl[0] = -0.2;
}
if (fsm == fsm_air2)
{
actuator_no = 2; //pservo-knee
set_position_servo(m,actuator_no,100);
actuator_no = 3; //vservo-knee
set_velocity_servo(m,actuator_no,10);
d->ctrl[0] = 0;
}
//write data here (dont change/dete this function call; instead write what you need to save in save_data)
if ( loop_index%data_frequency==0)
{
save_data(m,d);
}
loop_index = loop_index + 1;
}
//************************
// main function
int main(int argc, const char** argv)
{
// activate software
mj_activate("mjkey.txt");
char xmlpath[100]={};
char datapath[100]={};
strcat(xmlpath,path);
strcat(xmlpath,xmlfile);
strcat(datapath,path);
strcat(datapath,datafile);
// load and compile model
char error[1000] = "Could not load binary model";
// check command-line arguments
if( argc<2 )
m = mj_loadXML(xmlpath, 0, error, 1000);
else
if( strlen(argv[1])>4 && !strcmp(argv[1]+strlen(argv[1])-4, ".mjb") )
m = mj_loadModel(argv[1], 0);
else
m = mj_loadXML(argv[1], 0, error, 1000);
if( !m )
mju_error_s("Load model error: %s", error);
// make data
d = mj_makeData(m);
// init GLFW
if( !glfwInit() )
mju_error("Could not initialize GLFW");
// create window, make OpenGL context current, request v-sync
GLFWwindow* window = glfwCreateWindow(1244, 700, "Demo", NULL, NULL);
glfwMakeContextCurrent(window);
glfwSwapInterval(1);
// initialize visualization data structures
mjv_defaultCamera(&cam);
mjv_defaultOption(&opt);
mjv_defaultScene(&scn);
mjr_defaultContext(&con);
mjv_makeScene(m, &scn, 2000); // space for 2000 objects
mjr_makeContext(m, &con, mjFONTSCALE_150); // model-specific context
// install GLFW mouse and keyboard callbacks
glfwSetKeyCallback(window, keyboard);
glfwSetCursorPosCallback(window, mouse_move);
glfwSetMouseButtonCallback(window, mouse_button);
glfwSetScrollCallback(window, scroll);
double arr_view[] = {89.608063, -11.588379, 5, 0.000000, 0.000000, 2.000000}; //view the left side (for ll, lh, left_side)
cam.azimuth = arr_view[0];
cam.elevation = arr_view[1];
cam.distance = arr_view[2];
cam.lookat[0] = arr_view[3];
cam.lookat[1] = arr_view[4];
cam.lookat[2] = arr_view[5];
// install control callback
mjcb_control = mycontroller;
fid = fopen(datapath,"w");
init_save_data();
init_controller(m,d);
// use the first while condition if you want to simulate for a period.
while( !glfwWindowShouldClose(window))
{
// advance interactive simulation for 1/60 sec
// Assuming MuJoCo can simulate faster than real-time, which it usually can,
// this loop will finish on time for the next frame to be rendered at 60 fps.
// Otherwise add a cpu timer and exit this loop when it is time to render.
mjtNum simstart = d->time;
while( d->time - simstart < 1.0/60.0 )
{
mj_step(m, d);
}
if (d->time>=simend)
{
fclose(fid);
break;
}
// get framebuffer viewport
mjrRect viewport = {0, 0, 0, 0};
glfwGetFramebufferSize(window, &viewport.width, &viewport.height);
//opt.frame = mjFRAME_WORLD; //mjFRAME_BODY
//opt.flags[mjVIS_COM] = 1 ; //mjVIS_JOINT;
//opt.flags[mjVIS_JOINT] = 1 ;
// update scene and render
cam.lookat[0] = d->qpos[0];
mjv_updateScene(m, d, &opt, NULL, &cam, mjCAT_ALL, &scn);
mjr_render(viewport, &scn, &con);
//printf("{%f, %f, %f, %f, %f, %f};\n",cam.azimuth,cam.elevation, cam.distance,cam.lookat[0],cam.lookat[1],cam.lookat[2]);
// swap OpenGL buffers (blocking call due to v-sync)
glfwSwapBuffers(window);
// process pending GUI events, call GLFW callbacks
glfwPollEvents();
}
// free visualization storage
mjv_freeScene(&scn);
mjr_freeContext(&con);
// free MuJoCo model and data, deactivate
mj_deleteData(d);
mj_deleteModel(m);
mj_deactivate();
// terminate GLFW (crashes with Linux NVidia drivers)
#if defined(__APPLE__) || defined(_WIN32)
glfwTerminate();
#endif
return 1;
}














 851
851











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









