







一、200smart组态配置
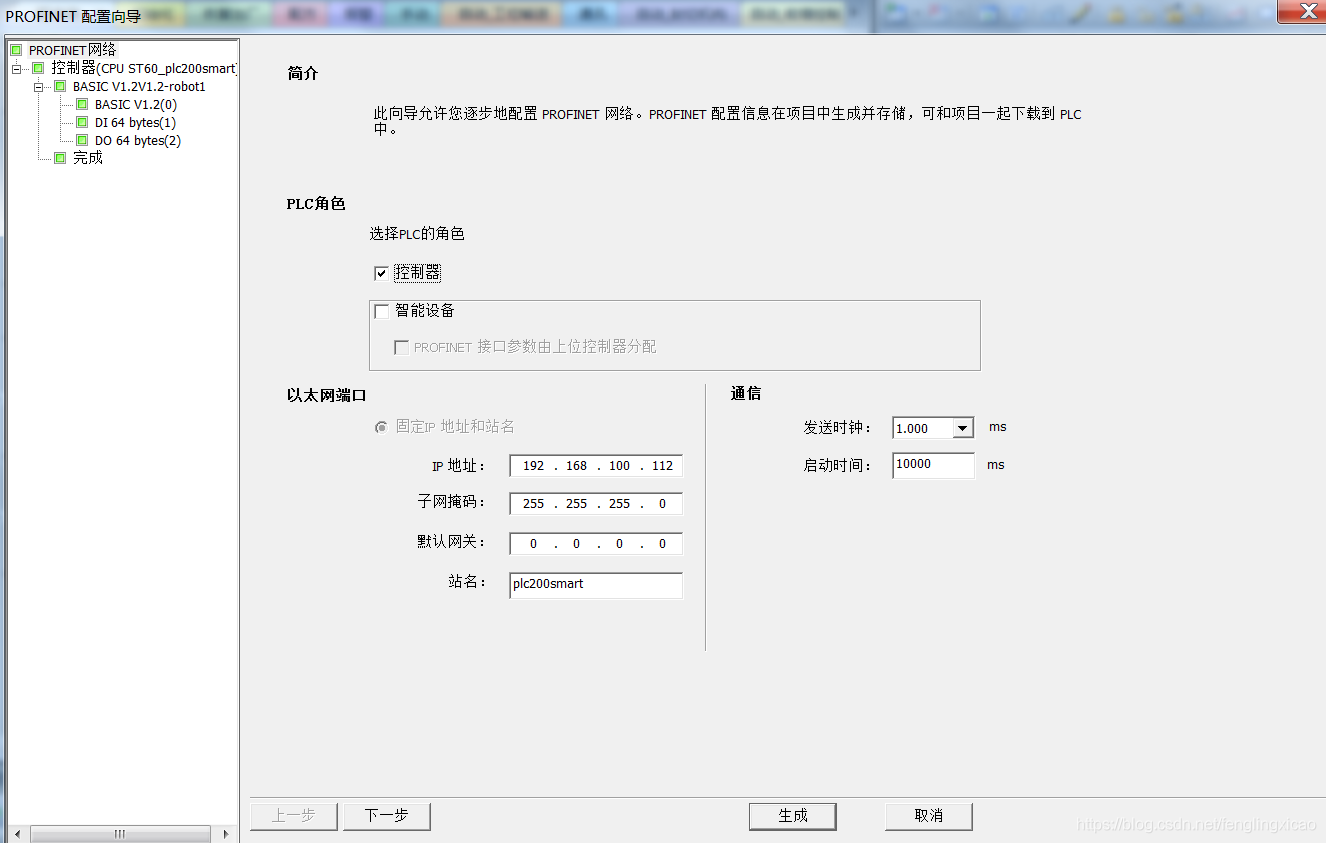
(1)工具–PROFINET向导;依据设备唯一标识MAC地址,搜索设备,分配IP地址、选择PLC作为主站or从站
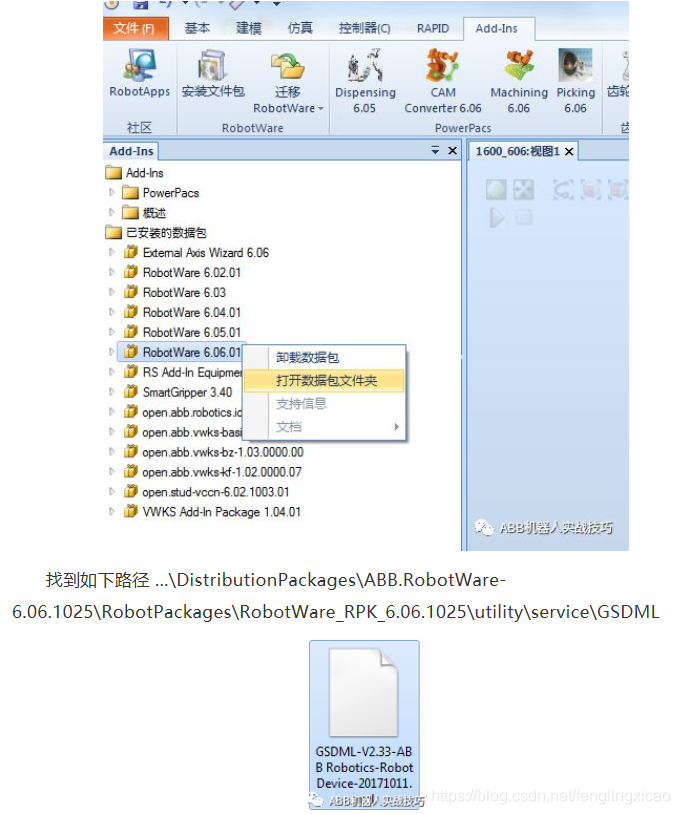
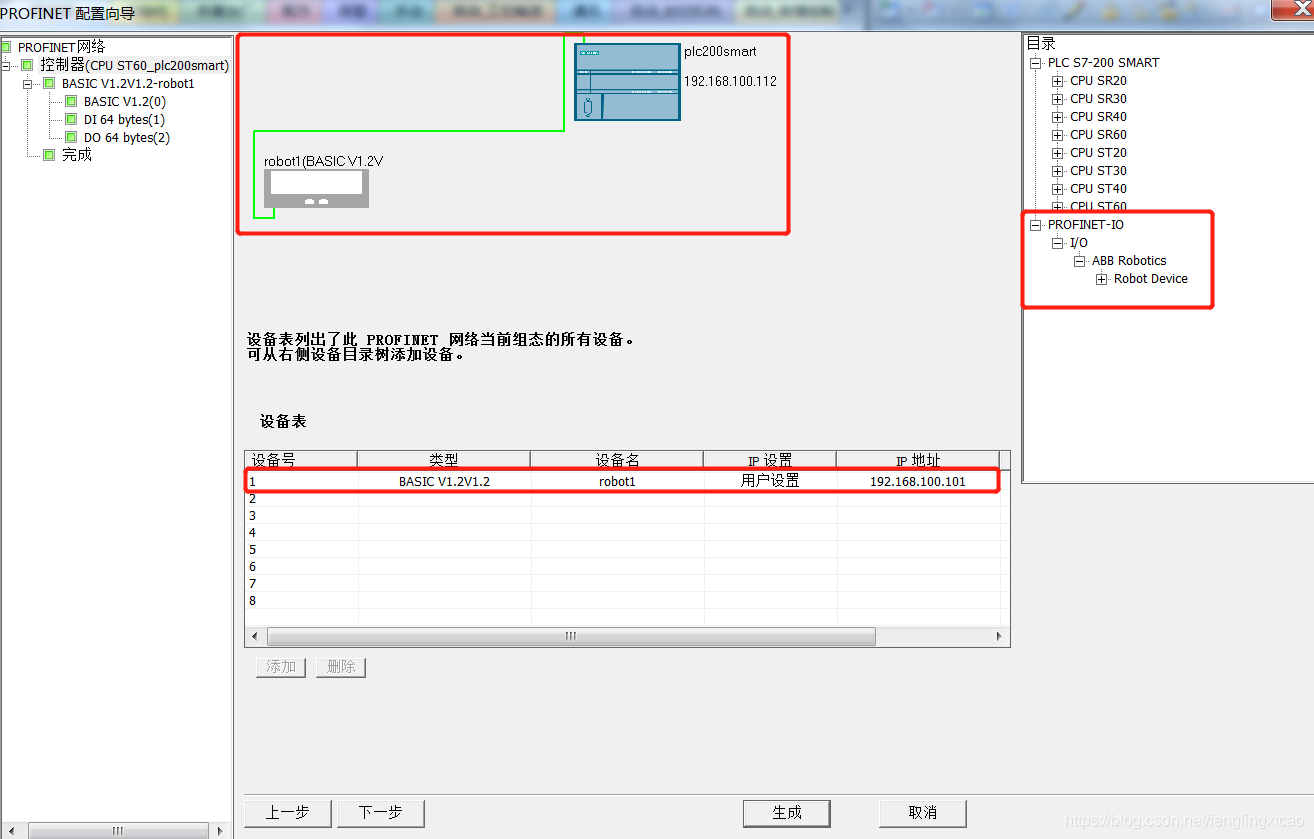
(2)添加ABB机器人GSD文件、设置设备名
ABB机器人GSD文件打开方式:
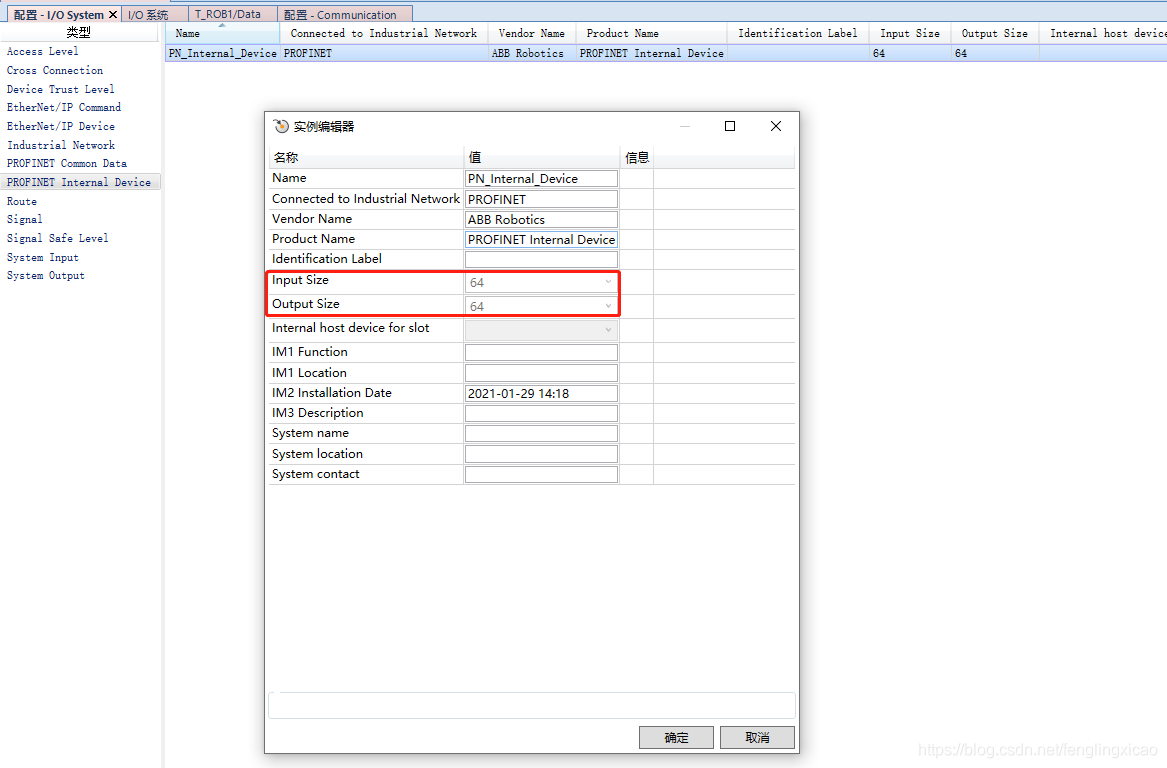
(3)添加通信DI / DO字节配置,(备注:ABB机器人添加PN板卡,机器人内部添加地址为bool(如0-63)共占8个byte)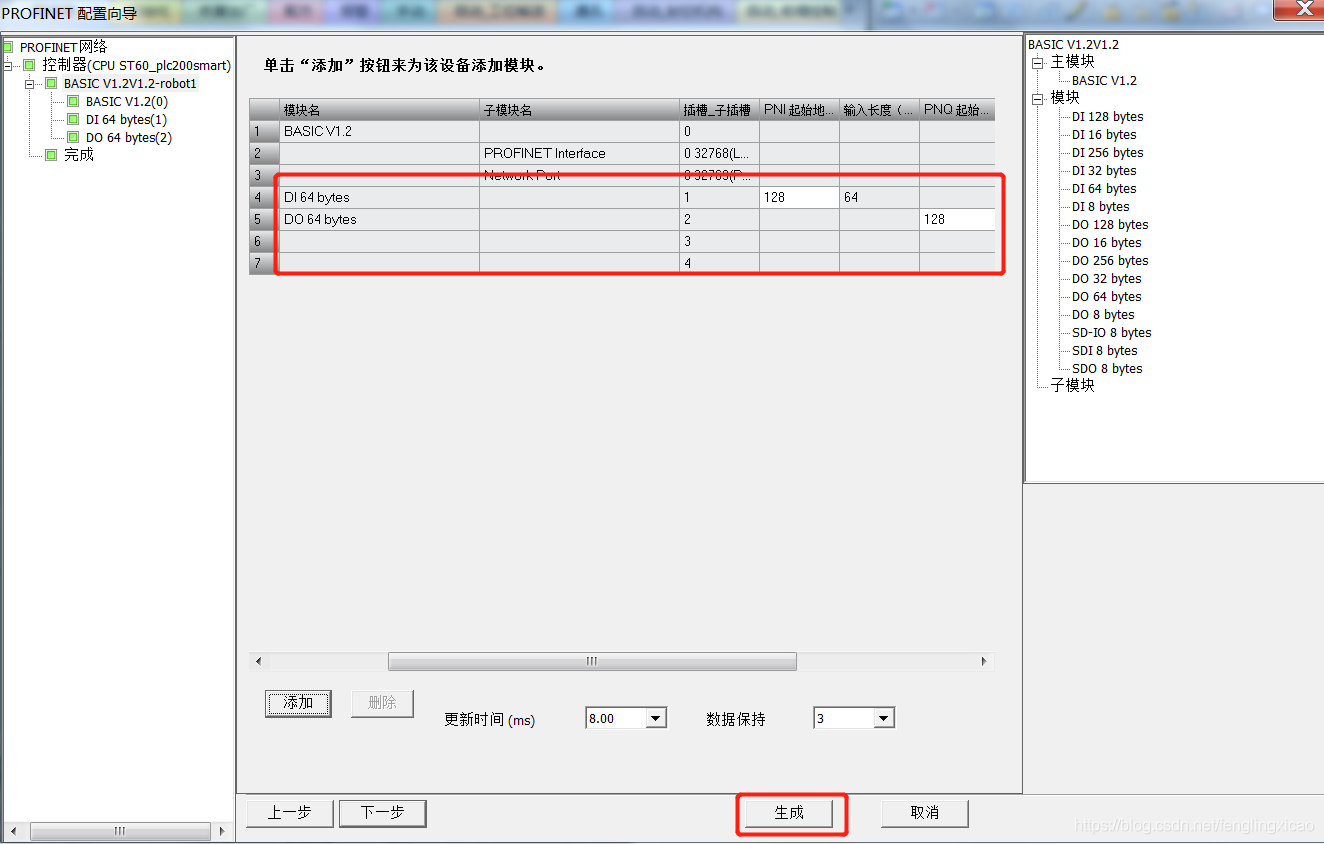
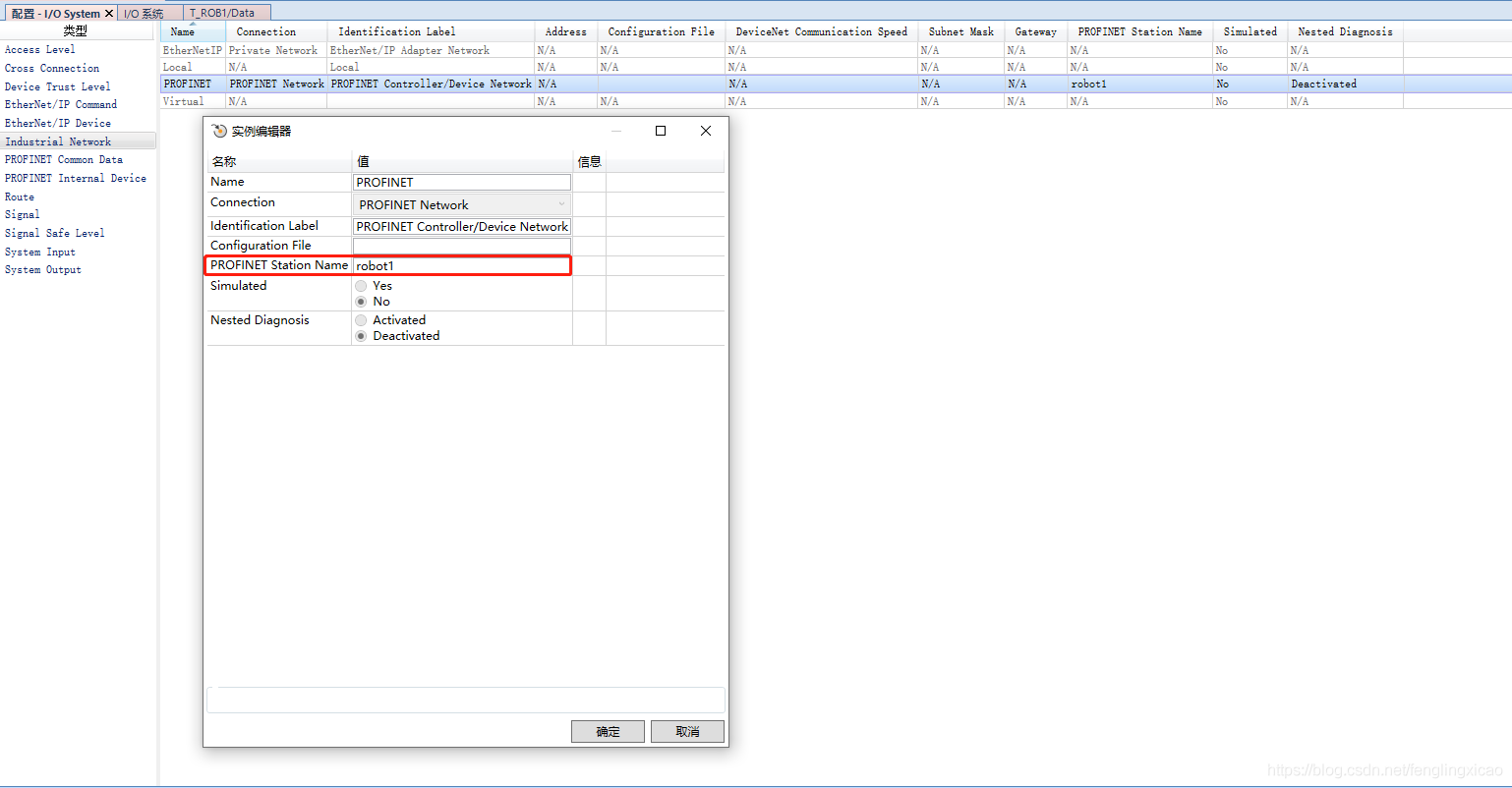
二、ABB Profinet通信参数设置
(1)设置IP地址,与PLC通信IP地址一致

(2)设置Profinet通信设备名称,与PLC内部通信设备名一致(大小写也一致)
(3)分配PN网络上IO地址(备注:ABB机器人输出=PLC输入,PLC输出=ABB机器人输入)

三、1200PLC与ABB机器人Profinet通信案例
备注:简单的实操案例,希望为初使用者节省时间!
















 1328
1328











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











