






目录
前言
ROS的介绍
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。
环境:
ubuntu 18.04
VMware16.0
vscode
一、ros安装以及小海龟的用法
1.添加软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加密钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
3.下载安装ros
sudo apt update
sudo apt-get install ros-melodic-desktop-full
melodic仅是我这个Ubuntu版本用的,其他版本不一定适用。
4.安装python-rosdep
sudo apt install python-rosdep
5.初始化ros
sudo rosdep init
rosdep update
问题
出现ERROR: cannot download default sources list from: https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list Website may be down.的错误
输入下面的命令修改一下host文件:
sudo gedit /etc/hosts
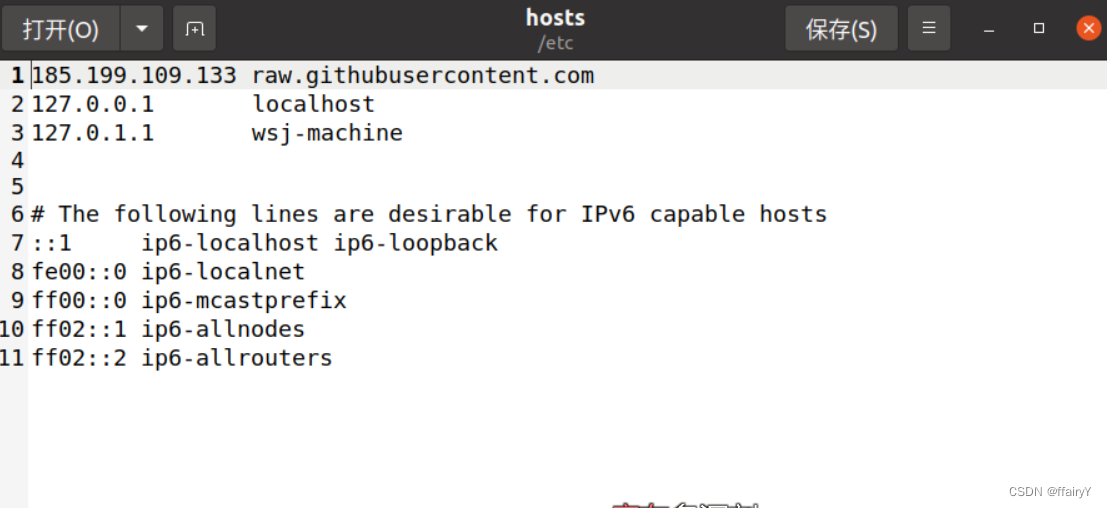
在第一行添加下方的地址,再进行初始化:
199.232.28.133 raw.githubusercontent.com
最后运行正常则会出现下图所示的情况

6.使用小海龟
1.新建终端运行roscore
roscore
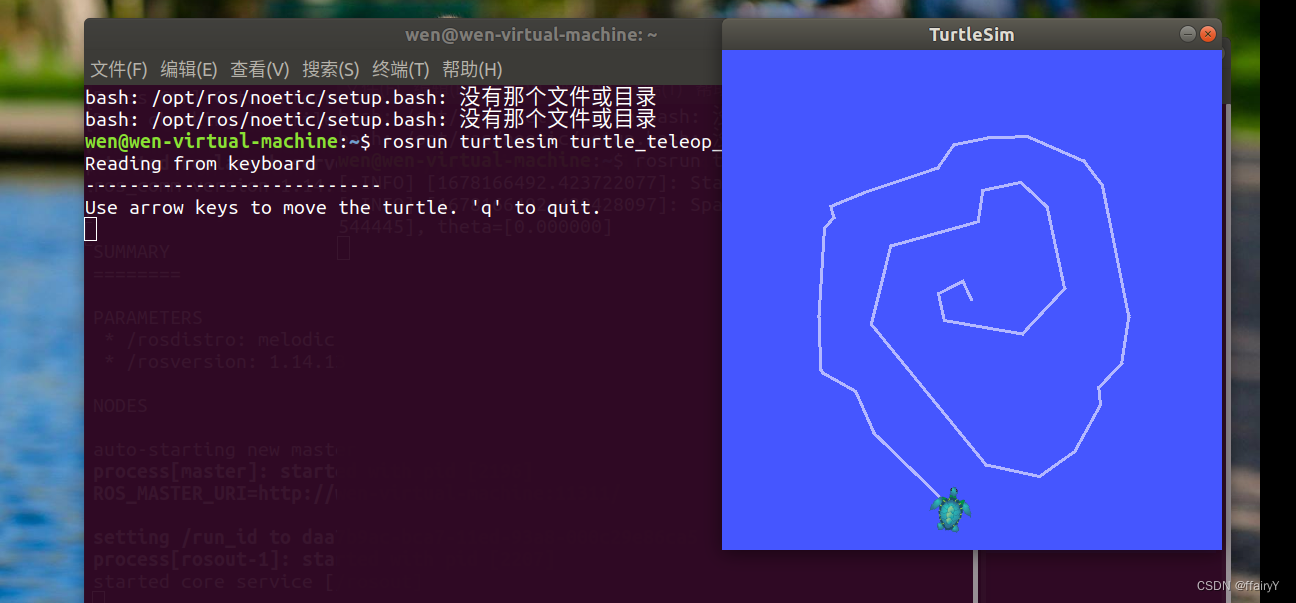
2.新建终端启动小海龟的仿真器
rosrun turtlesim turtlesim_node
3.新建终端打开键盘控制器
rosrun turtlesim turtle_teleop_key
然后就出现了小海龟,可通过键盘对小海龟进行操作,并且实现画圆。
二、话题查看器查看两个node之间的消息传递
在上面的三个终端运行的时候,再新建一个终端输入下面的命令查看话题:
rqt_graph

可以看到/teleop_turtle发布者通过 /turtle1/cmd_vel 这个话题向订阅者 /turtlesim 进行发布内容。
三、C++写一个程序,控制小海龟走一个圆形
开启新的终端输入指令,查看自定义的类型
rosmsg show geometry_msgs/Twist

创建工作空间并用code打开:
创建一个cpp文件

将下列代码写入新建的cpp文件中
mkdir -p test_ws/src
cd test_ws
catkin_make
code .
设置环境变量
source devel/setup.bash
创建功能包:
cd到src目录下,新建haigui包
catkin_create_pkg haigui std_msgs roscpp
在功能包下的右击创建cpp文件:
/*
编写 ROS 节点,控制小乌龟画圆
准备工作:
1.获取topic(已知: /turtle1/cmd_vel)
2.获取消息类型(已知: geometry_msgs/Twist)
3.运行前,注意先启动 turtlesim_node 节点
实现流程:
1.包含头文件
2.初始化 ROS 节点
3.创建发布者对象
4.循环发布运动控制消息
*/
#include "ros/ros.h"
#include "geometry_msgs/Twist.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"control");
ros::NodeHandle nh;
// 3.创建发布者对象
ros::Publisher pub = nh.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",1000);
// 4.循环发布运动控制消息
//4-1.组织消息
geometry_msgs::Twist msg;
msg.linear.x = 1.0;
msg.linear.y = 0.0;
msg.linear.z = 0.0;
msg.angular.x = 0.0;
msg.angular.y = 0.0;
msg.angular.z = 2.0;
//4-2.设置发送频率
ros::Rate r(10);
//4-3.循环发送
while (ros::ok())
{
pub.publish(msg);
ros::spinOnce();
}
return 0;
}
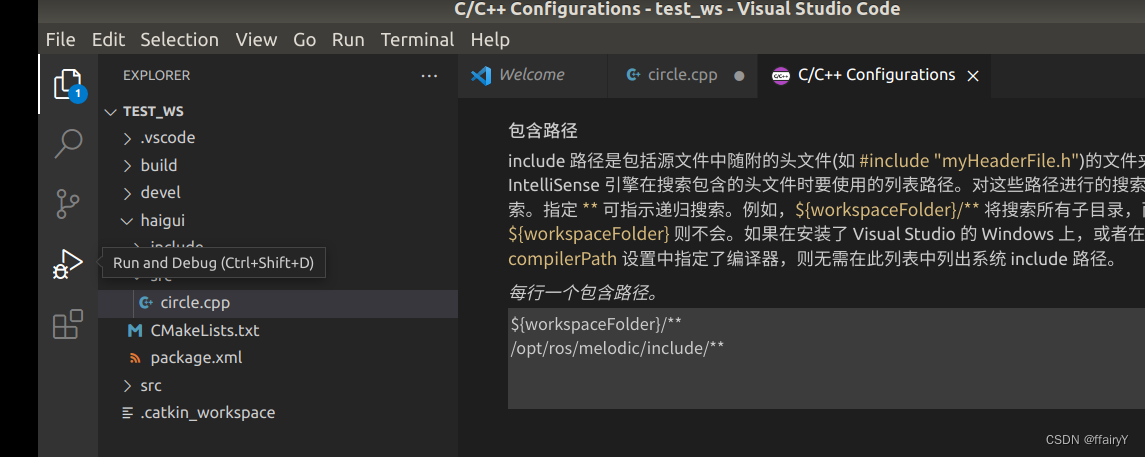
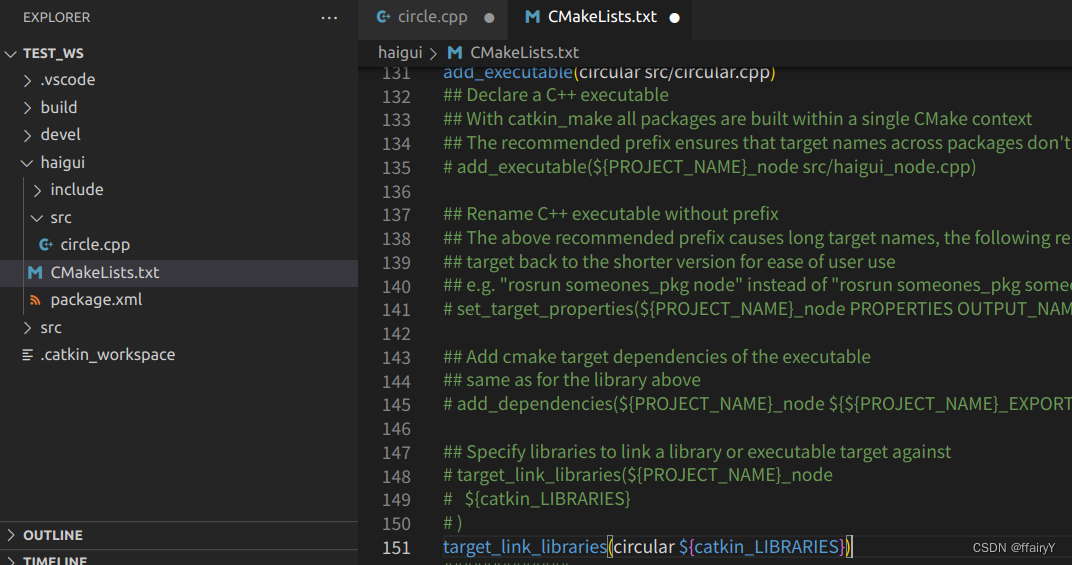
在头文件处点击进入设计详情,更改路径
在该文件中加入代码
add_executable(circular src/circular.cpp)
target_link_libraries(circular ${catkin_LIBRARIES})
最后在开启第三次终端是输入以下代码,使用代码对小海龟进行控制
cd ~/test_ws/ //进入工作空间
source devel/setup.bash //设置环境
rosrun haigui circular
- 效果

四、总结
此次实验成功实现了使用ros启动小海龟,并且通过代码实现运用键盘对小海龟进行控制,然后还进一步使用C++代码对小海龟进行画圆操作,进一步加强了我对于ros以及c++的练习运用。















 2564
2564











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









