









线特征基础(LSD算法、LBD描述子、普朗克坐标)
参考链接
SLAM线特征学习(1)——基本的线特征表示与优化推导
【学习记录】SLAM线特征基础:LSD算法、LBD描述子、普朗克坐标、EDLines算法
视觉slam线匹配算法
线特征—LSD算法(二)
线特征—LBD算法(三)
普吕克坐标下的线特征观测模型
SLAM线特征学习(1)——基本的线特征表示与优化推导
LSD算法
LSD直线检测方法首先计算每个像素点的水平线(Level-Line)角度,从而形成了一个水平线场(Level-Line Field),即单位矢量场。这里像素点的水平线角度就是该点梯度方向的垂直角度,
 而水平线场就是一个与图像中的点一一对应的矩阵,矩阵中元素的值即为对应到图像中点的水平线角度,依据水平线角度用区域生长的方法将其切割成若干个连通域,每个连通域中所有像素点的水平线角度变化不能超过容忍值\tau,这样的连通域称为线支持区域(Line Support Regions),每个线支持区域都是线段检测的候选对象。
而水平线场就是一个与图像中的点一一对应的矩阵,矩阵中元素的值即为对应到图像中点的水平线角度,依据水平线角度用区域生长的方法将其切割成若干个连通域,每个连通域中所有像素点的水平线角度变化不能超过容忍值\tau,这样的连通域称为线支持区域(Line Support Regions),每个线支持区域都是线段检测的候选对象。
 接下来对这些直线段的候选做筛选,将支持域的一个主惯性轴作为矩形的主方向,从而构建出一个最小外接矩形。
接下来对这些直线段的候选做筛选,将支持域的一个主惯性轴作为矩形的主方向,从而构建出一个最小外接矩形。
 之后检查矩形中像素的level-line angle,如果与最小外接矩形的主方向的角度差在容忍度范围内,这个像素就被称作同性点。统计最小外接矩形内所有的像素数量和同性点的数量,之后利用a contrario approach and the Helmholtz principle这两个原则进行检测。
之后检查矩形中像素的level-line angle,如果与最小外接矩形的主方向的角度差在容忍度范围内,这个像素就被称作同性点。统计最小外接矩形内所有的像素数量和同性点的数量,之后利用a contrario approach and the Helmholtz principle这两个原则进行检测。
 这两个原则是说在完美噪声图像图像中不应该检测到目标和一个不会检测到目标的噪声图像,具体做法就是引入一个新的模型a contrario model,这个模型可以理解为一个完美噪声图像,每个像素值相互独立,并且服从[0,2π]的均匀分布。然后分别对目标图像以及引入的噪声图像的矩形框区域内的像素以及aligned points进行统计,计算图像aligned points个数小于噪声图像aligned points个数的概率,再乘一个比例系数,就作为NFA的值,根据这个值判断是不是一条线。(后续深入可以看线特征—LSD算法(二)和视觉slam线匹配算法)
这两个原则是说在完美噪声图像图像中不应该检测到目标和一个不会检测到目标的噪声图像,具体做法就是引入一个新的模型a contrario model,这个模型可以理解为一个完美噪声图像,每个像素值相互独立,并且服从[0,2π]的均匀分布。然后分别对目标图像以及引入的噪声图像的矩形框区域内的像素以及aligned points进行统计,计算图像aligned points个数小于噪声图像aligned points个数的概率,再乘一个比例系数,就作为NFA的值,根据这个值判断是不是一条线。(后续深入可以看线特征—LSD算法(二)和视觉slam线匹配算法)
LBD描述子
1.尺度空间中提取线段
为了克服在线检测碎片问题和提高大尺度变化的性能,我们的检测框架采用由对原始图像进行高斯下采样( with a set of 尺度因子and 高斯模糊 )的尺度空间金字塔组成(N层图像)。我们首先用Edline算法每层的尺度空间产生一组线。每条直线都有一个方向,它是由从直线左侧到右侧的大部分边缘像素点的梯度构成的。然后通过在尺度空间中找到对应的直线来组织它们。在尺度空间中所有的线,他们被分配一个唯一的ID,如果在图像中他们相关相同的事件,将其存储在一个称为LineVecs的向量中(即图像的同一区域具有相同的方向)。线检测方法 不同于Wang et al.[5] ,通过重新组织从尺度空间提取的所有的线段形成LineVecs,从而降低了图匹配问题的维数。最终提取的结果是一组LineVecs如下图:
 为描述一个LineVec局部外观,对于其中的每条线,我们会在被提取的线段的每层图中产生一种线描述符。
为描述一个LineVec局部外观,对于其中的每条线,我们会在被提取的线段的每层图中产生一种线描述符。
2.条带(Band)来表示线的支持域
在octave image给出了线段,描述符将从线段支持域(LSR)计算。该支持区域被划分为一组条带{B1;B2;…;Bm},每个条带都是LSR的子区域并且他们之间的平行的,条代数m的和每个条带的宽度w,条带的长度等于线段的长度,如下图当m =5 ,w=3的LSR例子。


 网上大部分都是参考这篇文章线特征—LBD算法(三)
网上大部分都是参考这篇文章线特征—LBD算法(三)
普吕克坐标
一种描述线的方法,在三维空间中,取直线上的两个点p1p2,则原点与两个点的连线可以构成两个向量,这里也记为p1p2,令d=p2-p1,m=p1×p2,普朗克坐标就是利用这两个向量去描述这条直线。d没有进行单位化,所以有长度也有方向,而且它的方向刚好就是直线的方向,大小是构成三角形的底。而m是两个向量的叉乘,从向量的角度来看,叉乘的结果依然是一个向量,向量的方向指向两个相乘的向量的垂线方向,大小为向量围成平行四边形的面积,所以m方向指向垂直方向,模的大小为围成三角形面积的两倍。(参考【论文阅读】DPLVO: Direct Point-Line Monocular Visual Odometry)


其中普吕克坐标下点到线距离:
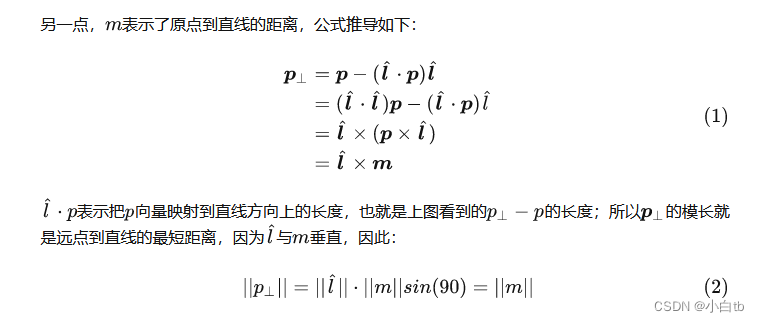
其他更多推论可以参考这篇链接SLAM线特征学习(1)——基本的线特征表示与优化推导















 3773
3773











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









