






内容全部翻译自PL-VIO: Tightly-Coupled Monocular Visual–Inertial Odometry Using Point and Line Features部分章节,方便查阅
一、以普吕克坐标表示3D直线
由于直线有四个自由度,紧凑参数化直线需要四个参数,普吕克坐标假设直线无限延长,针对三维直线提出两种参数化方法,普吕克坐标由六个参数组成,利用正交表示的紧凑性对其进行优化

图a表示相机帧c观测现实中的一条直线L,普吕克坐标表示这条直线为:![]()
其中n向量表示直线与原点(即观测点)所在平面的法向量,d表示直线方向向量,图b是在两个连续相机帧观察到同一条直线在相机上的投影图解。
1.坐标变换:从世界坐标系w到相机坐标系c的转换矩阵为
得到普吕克坐标表示的线在两个坐标系的转换为
2.计算L的普吕克坐标
当在两个相机视角观察到新的线特征时,计算普吕克坐标比较容易,如上图b所示,相机帧在c1和c2帧分别观察到同一条线L
线的一个分量![]() 在归一化图像平面可以通过两个端点表示
在归一化图像平面可以通过两个端点表示
![]()
以上两个端点加上坐标原点可以表示平面![]()
 根据原点坐标得到平面的约束公式,其中
根据原点坐标得到平面的约束公式,其中 平面参数由两端点计算获得
平面参数由两端点计算获得
因此,如果给定同一条直线的两个观测平面Π1、Π2,则可以通过以下公式的计算获得直线的普吕克坐标表达:

注意:由于普吕克坐标为单位向量组成,还需要进行归一化
二 、用正交优化普吕克坐标
接下来通过正交表达来优化普吕克坐标,(普吕克坐标和正交表示可以相互转化)正交表达式为![]()
![]()
如图a表示在三维线上定义一个坐标系,归一化的法向量和方向向量是坐标系的两个轴,第三个轴是前两个轴的矢量相交结果,定义线坐标系和相机坐标系之间的旋转定义为U:
U和普吕克坐标的转换关系:
利用三角函数表示:
其中W包含原点到3D线的距离d,U和W的定义包含四个自由度,在优化过程中用:![]() 来表示优化变量最小表示
来表示优化变量最小表示
正交化后获得优化后的普吕克坐标
其中L'和L之间存在比例因子
三、线特征测量模型
线的重投影误差定义为从端点到投影线的距离,针对针孔相机来说,一条3D空间的线L通过以下投影公式投影到相机平面上:

其中 K 为线特征的投影矩阵,当将直线投影到归一化平面时,K是单位矩阵,投影公式中只涉及到直线普吕克坐标中的平面法向量n,因此投影坐标仅与法向量有关
当给定直线在世界坐标系下普吕克坐标L和正交表达O时,首先将其通过上述的坐标转换公式转换为相机坐标系,然后将其投影到相机平面上获得投影线段 I ,将第 i 相机帧的重投影误差定义为:
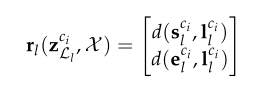
其中第一项代表从端点 s 到投影线段的距离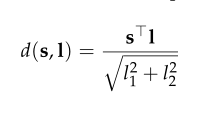
接下来就是进行Jacobian,推导过程见贺博论文附录















 4448
4448











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









