






首先,我们存储了cg和dito感兴趣八个角图像的模板,用来匹配位置。
cover指的是cg的四个角模板,lcm是dito四个角匹配模板。模板大概样子如下(cg的一个角):
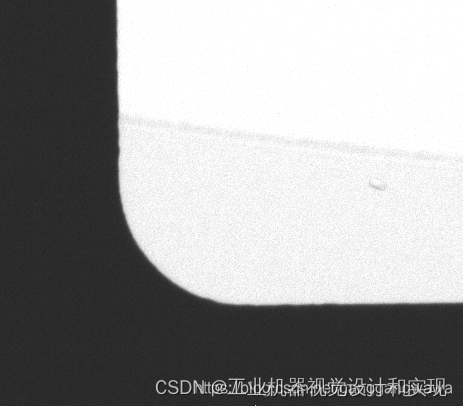
其次,我们采集的8副图像(m_DlgCCDViewArr[2][4])中一定包含匹配模板的特征。
好,我们分析代码如何找角坐标:
第一,m_DlgCCDViewArr[i][j].MatchImage();在图像中找模板
1,调用ni匹配角度限制:MatchPatternOptions options;
RotationAngleRange rr[2];
PointFloat poinf;
float angle;
float angleRangeMin[2] = { pMainDlg->m_MatchOption.anglelower,0 };
float angleRangeMax[2] = { pMainDlg->m_MatchOption.angleupper,0 };
for (int i = 0 ; i < 2 ; i++)
{
rr[i].lower = angleRangeMin[i];
rr[i].upper = angleRangeMax[i];
}
2,ni匹配初始设置:
options.mode =IMAQ_MATCH_SHIFT_INVARIANT;//尺度不变
options.minContrast =5;// pMainDlg->m_MatchOption.minContrast;最小对比度
options.angleRanges=rr;角度范围限制
options.numRanges = 2;
options.subpixelAccuracy=FALSE;亚像素
options.numMatchesRequested = 1;
options.matchFactor =pMainDlg->m_MatchOption.matchFactor;
options.minMatchScore =pMainDlg->m_MatchOption.minMatchScore; //800;
3,调用ni图像库匹配:(ni喜欢用imaq开头)
int numMatches = 0;
PatternMatch* matchInfo=NULL;
matchInfo = imaqMatchPattern2(m_imgBase, m_imgTemplate, &options,NULL,IMAQ_NO_RECT, &numMatches);//OK
第二,匹配到后,找直线,应该调用ni图像处理库的抓线卡尺:
1, this->SearchGauge();
ni图像处理库,还是很复杂,我们捡重点说(我觉得初学用visionpro比较好): FindStraightEdge2();
IVA_FindStraightEdge2(/*roi*/m_rcCurrAreaX,m_AdvEdgeOptionX,l1st,l1en,l1ang);
IVA_FindStraightEdge2(/*roi*/m_rcCurrAreaY,m_AdvEdgeOptionY,l2st,l2en,l2ang);
2, imaqGetIntersection(l1st,l1en,l2en, l2st,&m_Intersection);找到两条线的十字交叉点,其实模板的样子如下:细节上不同
第三,十字交叉点找到了,要通过标定,把像素坐标变换毫米坐标。
这IVA_FindStraightEdge2函数显然是ni的找直线卡尺了,到此,ni的匹配,ni的找直线,和ni的十字交叉点就解释清楚了。
想一想,如果我们自己不用ni,我们最先能实现的肯定是十字交叉点,再就是找直线,初学,匹配肯定是搞不定的。
实际上,在产品万千次生产重复中,我们其实用不到匹配,因为每次的产品细节上不可能差错,显然,以为找直线卡尺有弹性范围,只用直线卡尺,就能搞定问题。因为机器和产品稳定后,轻易不可能动,这个道理是显而易见的。
图像处理算法千千万,当掉落到现实中,我们可能只用那么一点点,所以所有现实的制约,是极有好处的,在自动化中,我们常常会利用这种制约条件,机器视觉也不例外。(所有的制约如果推翻,我们需要重新制造,我们不生产iphone4了,我们要生产iphone4s,iphone5,但实际仍然走的是这条路,大多数是相似,甚至相同,不需要改变,利用制约,顺其自然,一旦我们走上正轨,很多时候,都是在走重复的路,反复的遵从理想而要去创造历史,大多会失败,因为理想是无条件的,新路都是老路上长出来的,好像有人这么说过!)
所以,学习视觉,先懂那么一点点,日积月累。因为人的欲望会把自己压垮,排的满满的,实际是,大多数情况就像,看守机台,大多数情况不会有问题,没事,去小憩一会,一个人看几十台,没一点问题,人生就是这样,如果你在偷的半日闲中,如果领悟了无上的妙理,诗句,或者一点技术,或者一点勇气,其实这辈子就够用了。
其实人生就开挂了,从零到一,从前笨的自己好像变聪明了。
如果有人天天盯着你做事,或者你不放过自己,偷不了那半日闲(小憩),释然的心态去学习,pay attion to 当下(其实就是机器视觉roi),0到1很难跨过去
但无论何时,人生总会从0到1.
其实从机器视觉到人工智能,实际就是iphone4到iphone14,理解这个东西,我花了近十年时间,因为人工智能出现的很多新名词,你都可以在机器视觉(计算机视觉)中找到原型。
原型,prototype。在生产制造中,你经常会看到。我曾经在富士康看到过这个单词,但当时我不认识!
从理想到原型机,这就是我们的人生!
下一节,我们聊一聊图像封装类,待续















 606
606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









