







1软件:ros_qtc_plugin
ubuntu14.04
2运行原理及代码来自http://wiki.ros.org/navigation/Tutorials/RobotSetup/TF
3编写代码:
在利用ros_qtc_plugin建立新的工作空间时,首先要注意运行 gedit ~/.bashrc 进行编辑将启动文件地址加在末尾我的是source /home/adminer/w_test/devel/setup.bash.
进入工作空间的src文件下,否则使用下面代码时失败。
运行 roscreate-pkg robot_setup_tf roscpp tf geometry_msgs
意思是创建robot_setup_tf文件,并添加tf roscpp geometry_msgs 依赖。roscreate-pkg使用方法地址http://wiki.ros.org/roscreate
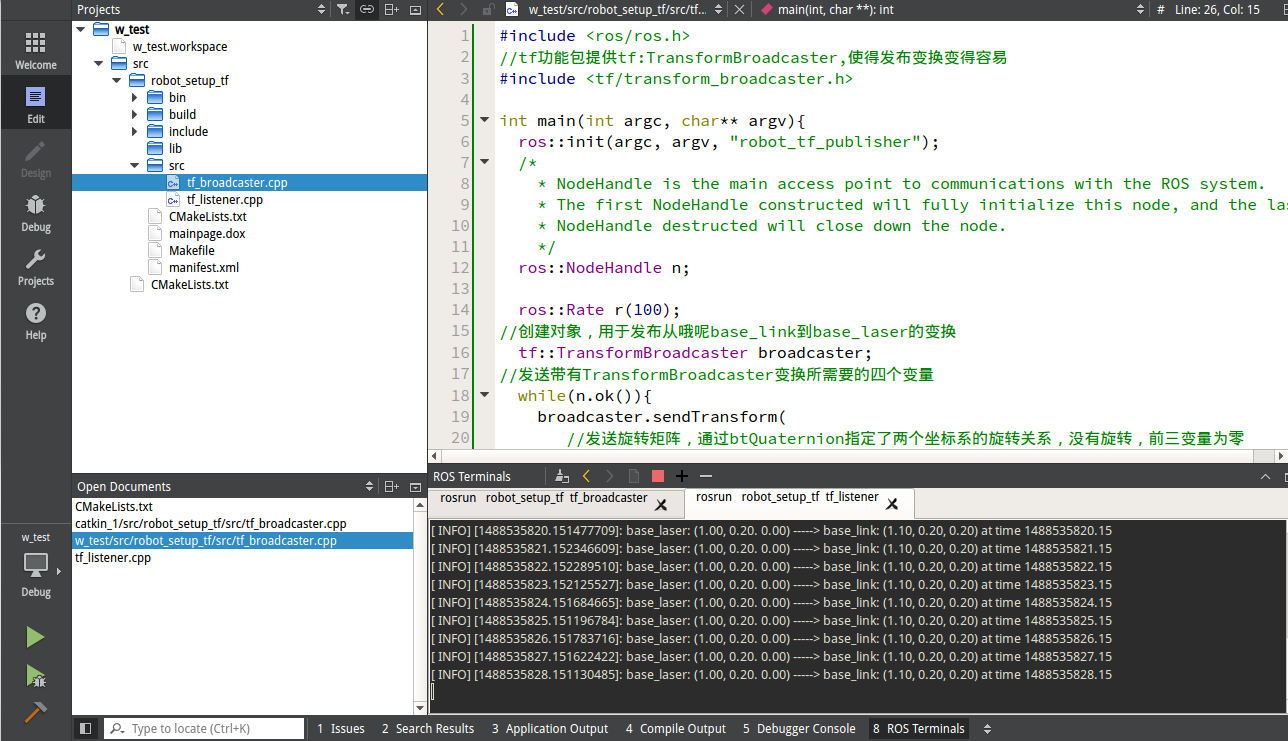
(1)利用ros_qtc_plugin创建文件tf_broadcaster.cpp
编辑代码:
#include <ros/ros.h>
//tf功能包提供tf:TransformBroadcaster,使得发布变换变得容易
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_publisher");
/*
* NodeHandle is the main access point to communications with the ROS system.
* The first NodeHandle constructed will fully initialize this node, and the last
* NodeHandle destructed will close down the node.
*/
ros::NodeHandle n;
ros::Rate r(100);
//创建对象,用于发布从哦呢base_link到base_laser的变换
tf::TransformBroadcaster broadcaster;
//发送带有TransformBroadcaster变换所需要的四个变量
while(n.ok()){
broadcaster.sendTransform(
//发送旋转矩阵,通过btQuaternion指定了两个坐标系的旋转关系,没有旋转,前三变量为零
//随后是一个平移变量btVector3
tf::StampedTransform(
tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.1, 0.0, 0.2)),
//给将要发布的变换指定时间戳ros::Time::now(),传送父节点base_link.子节点base_laser
ros::Time::now(),"base_link", "base_laser"));
r.sleep();
}
}(2)利用 ros_qtc_plugin创建文件tf_listener.cpp
添加代码
#include <ros/ros.h>
#include <geometry_msgs/PointStamped.h>
#include <tf/transform_listener.h>
void transformPoint(const tf::TransformListener& listener){
/*we'll create a point in the base_laser frame that we'd like to transform
*to the base_link frame*/
geometry_msgs::PointStamped laser_point;
laser_point.header.frame_id = "base_laser";
//we'll just use the most recent transform available for our simple example
laser_point.header.stamp = ros::Time();
//just an arbitrary point in space
laser_point.point.x = 1.0;
laser_point.point.y = 0.2;
laser_point.point.z = 0.0;
try{
geometry_msgs::PointStamped base_point;
listener.transformPoint("base_link", laser_point, base_point);
ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f",
laser_point.point.x, laser_point.point.y, laser_point.point.z,
base_point.point.x, base_point.point.y, base_point.point.z, base_point.header.stamp.toSec());
}
catch(tf::TransformException& ex){
ROS_ERROR("Received an exception trying to transform a point from \"base_laser\" to \"base_link\": %s", ex.what());
}
}
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_listener");
ros::NodeHandle n;
tf::TransformListener listener(ros::Duration(10));
//we'll transform a point once every second
ros::Timer timer = n.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener)));
ros::spin();
}
4编译代码
打开CMakeList.txt文件,末尾添加
rosbuild_add_executable(tf_broadcaster src/tf_broadcaster.cpp)
rosbuild_add_executable(tf_listener src/tf_listener.cpp)
保存文件 在终端下的
robot_setup_tf功能包下运行rosmake,
5运行代码
(1)终端运行:roscore
(2)第二个终端运行rosrun robot_setup_tf tf_broadcaster
(2)第三个终端运行(2)第二个终端运行rosrun robot_setup_tf tf_listener
成功后显示:
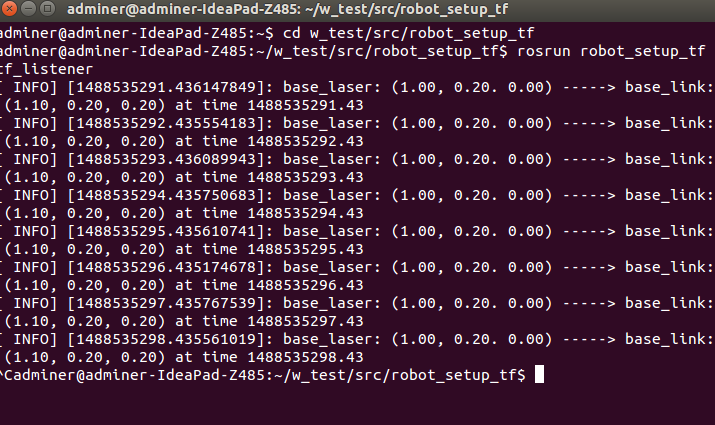
注意:qt下运行也可以















 1606
1606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









