







 笔者在实践过程中在Slam建图这一块卡了许久,网上教程基本都是复制代码,对初学者很不友好,有的也不正确,笔者肝出来后想提供一篇详细的博客,帮助后来人。此博客注重原理,使用衫川雷达delta 3i,其他雷达一样的操作原理。首先了解hector_slam功能包,ros_wiki一波。 首先了解话题的发布订阅,需要订阅/scan话题,即激光雷达发出的数据。中间参数可自行了解。3.1.5提出需要laser...
笔者在实践过程中在Slam建图这一块卡了许久,网上教程基本都是复制代码,对初学者很不友好,有的也不正确,笔者肝出来后想提供一篇详细的博客,帮助后来人。此博客注重原理,使用衫川雷达delta 3i,其他雷达一样的操作原理。首先了解hector_slam功能包,ros_wiki一波。 首先了解话题的发布订阅,需要订阅/scan话题,即激光雷达发出的数据。中间参数可自行了解。3.1.5提出需要laser...
笔者在实践过程中在Slam建图这一块卡了许久,网上教程基本都是复制代码,对初学者很不友好,有的也不正确,笔者肝出来后想提供一篇详细的博客,帮助后来人。
此博客注重原理,使用衫川雷达delta 3i,其他雷达一样的操作原理。
首先了解hector_slam功能包,ros_wiki一波。

首先了解话题的发布订阅,需要订阅/scan话题,即激光雷达发出的数据。
中间参数可自行了解。
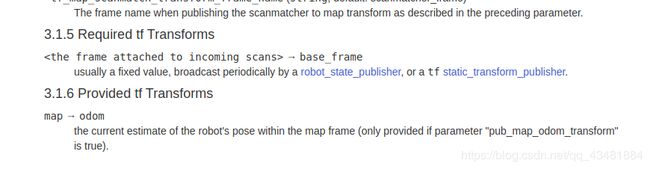
3.1.5提出需要laser 到 base_link的tf变换。
3.1.6提出需要提供map到odom的tf变换。
综上,我们得知,我们需要提供三样东西。
1、配置hector
首先,下载hector_slam功能包,
sudo apt-get install ros-kinetic-hector-slam
在你的激光雷达功能包(这个一般厂家会提供,其他常见雷达可在网上搜索教程)中添加hector.launch,配置hector的具体参数。
我们可以看到以上launch文件已经包含:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3773
3773











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









