







8.3 CAN总线接口–硬件
虽然CAN总线目前已应用于工业控制、机器人、医疗器械等领域,汽车控制领域是CAN总线的最大市场。保守地估算,按每辆车30个CAN网络节点,2019年全球汽车产量约9100万辆, 即27.3亿个CAN网络节点。在汽车领域,CAN网络节点被称作ECU(电子控制单元),譬如汽车左右后视镜就是2个ECU,每个后视镜至少有2个马达(控制镜片绕2个方向旋转)和1个转向指示灯, 在CAN总线引入汽车之前这些ECU单元需要很多根控制信号和供电电缆连接到中控系统,现在CAN总线只需要4根(2根通讯和2根供电)电缆即可将这些ECU连接起来, 不仅降低电缆成本还极大地简化车内布线、维修等。
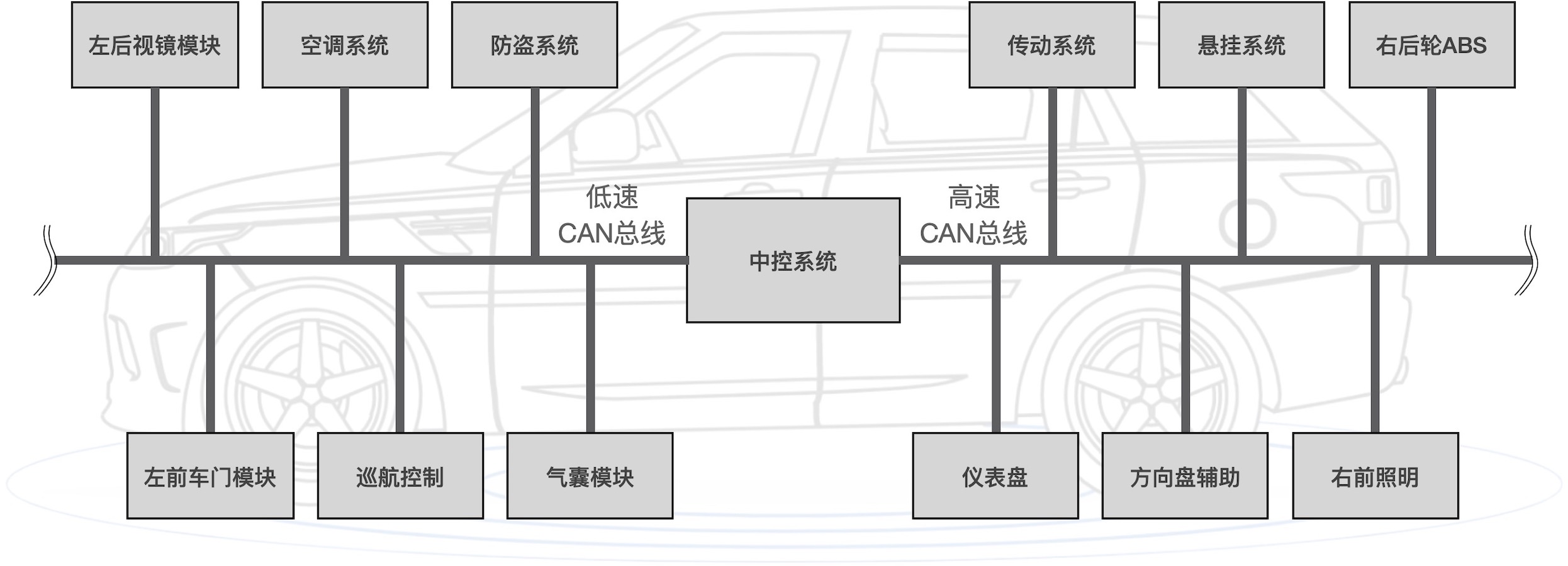
图8.12 CAN总线在汽车控制系统中的应用
图8.12给出汽车控制系统中典型的CAN总线应用示意图。本质上,每个ECU就是一个车载的嵌入式系统。我们使用“车载的”,因为车载的嵌入式系统与工业级、商业级和消费级嵌入式系统不同, 车用级别的嵌入式系统涉及人身安全且运行环境恶略(如电磁辐射、浪涌电流冲击、静电放电,以及高温、低温、长时间连续运行等),半导体行业有专门的“车规级”/“汽车级”标准。 上图中标注的“低速CAN总线”和“高速CAN总线”将在下一节的内容中解释,我们在这里只需要知道汽车控制系统的网络分为多种层次。
CAN总线经历数十年的发展已经形成稳定的软硬件设计模型[1]。图8.13是参照CAN总线协议栈的CAN网络节点的硬件设计模型。
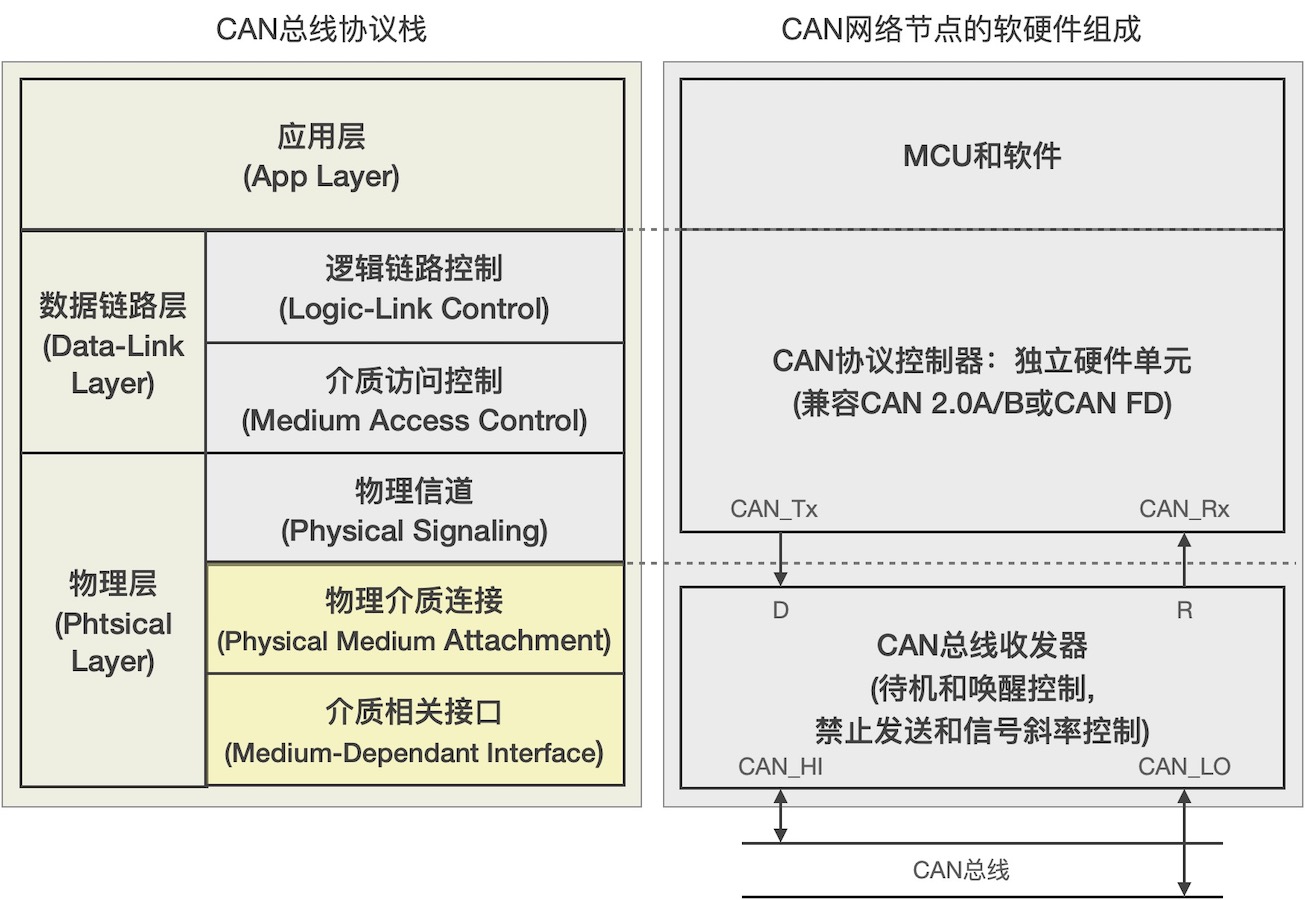
图8.13 CAN网路节点的硬件设计模型
目前第一代和第二代的CAN协议控制器均已被硬件化,即独立的集成电路或成熟的硬件功能单元的形态,而且绝大多数面向汽车控制、工业控制、机器人控制、 马达控制等应用领域的MCU和DSP都带有CAN协议控制器。硬化的CAN协议控制器不仅缩短CAN接口产品的设计周期,还能确保CAN总线时序的一致性, 当然硬件成本也非常低,还能降低CAN网络节点的CPU数据处理成本。独立的CAN协议控制器IC有很多种,Intel、NXP、TI、Microchip等知名半导体都有专门的产品线。
值得注意的是,虽然CAN总线的2个信号也是差分的,CAN总线收发器与RS485、RS422等差分信号收发器并不通用,根据前一节知识我们很清楚他们之间的区别。 图8.14给出CAN总线收发器的内部结构及其前后级接口的原理。在RS485等标准差分收发器中,逻辑‘1’和逻辑‘0’(或开路状态)都受驱动器控制,接收状态受控于专用的“enTxD”信号。 在CAN总线范畴,仅发送逻辑‘0’(显性位)时收发器处于受控状态,其他时刻收发器都是三态的(只能接收)。 图8.14所示的CAN总线收发器无需MCU或其他专用逻辑驱动的情况下即可实现这些状态模式。
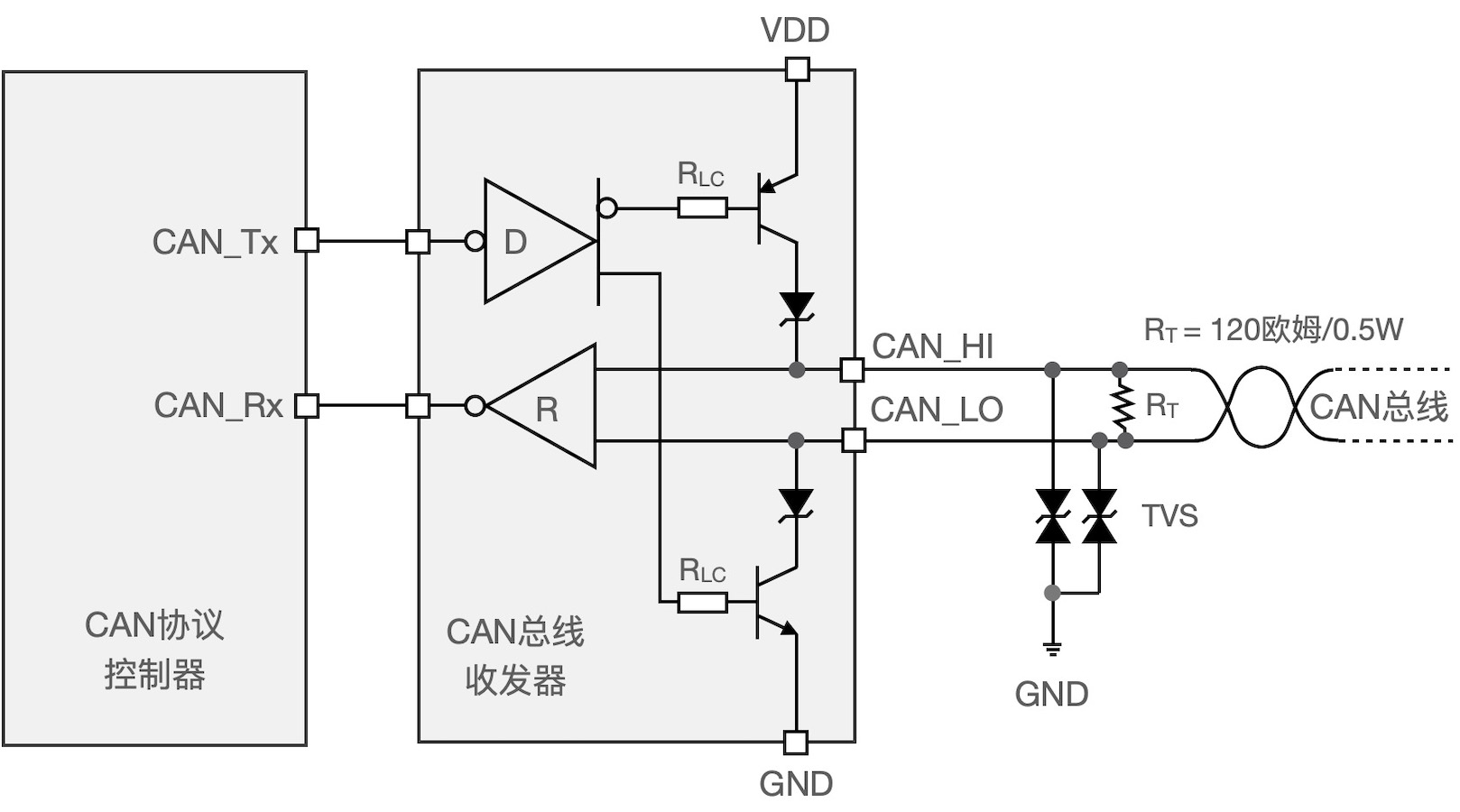
图8.14 CAN总线收发器的内部原理结构及其前后级接口
CAN总线驱动器也有很多种型号,大多数半导体制造商都有CAN驱动器IC(毕竟每年有27.3亿颗销量的市场)。虽然CAN总线收发器的工作电源和接口逻辑电平电压也有多种, 我们只需要根据所用MCU、CAN协议控制器的I/O电平逻辑来选择即可,因为CAN总线采用差分信号的电压差和阈值来判定高低电平。
对于CAN总线的终端电阻,图8.14中的RT需要注意其功率。根据CAN总线的差分信号接口,当传输显性位‘0’时CAN_HI信号通过内部P型三极管被拉高至VDD, 同时CAN_LO信号被内部N型三极管强制拉低到GND,此时终端电阻两端的电压差是最大的,CAN总线的驱动电流被限制在50mA,那么120欧终端电阻的功率为0.3W(即0.05*0.05*120), 这意味着至少选择1/3W(1210)或1/2W的规格。
根据CAN网络节点的硬件设计模型,图8.15是基于BlueFi的40P扩展接口的CAN接口的示例电路原理图。
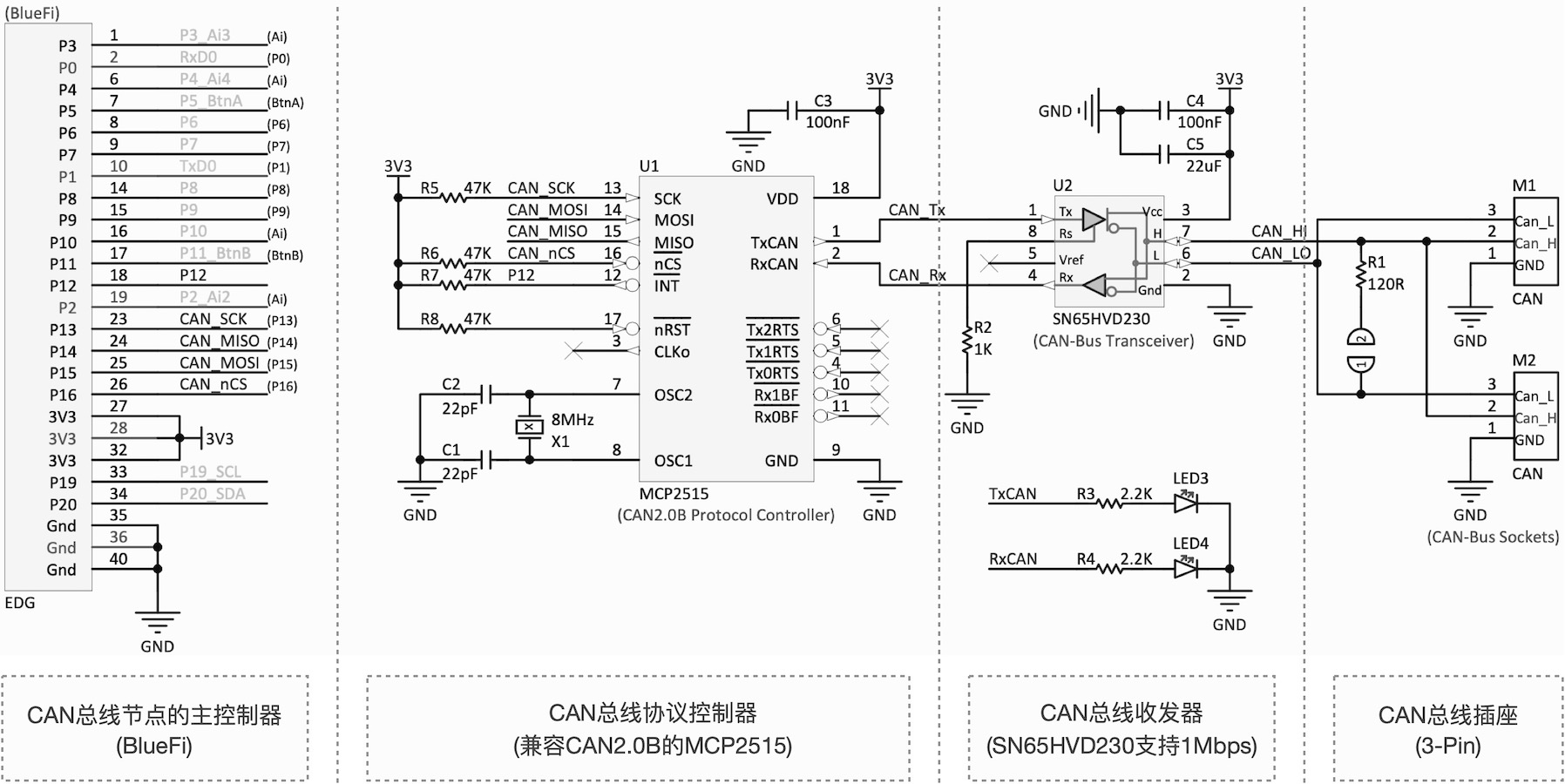
图8.15 CAN网路节点的硬件设计示例:BlueFi-CAN拓展板
在图8.15所示的设计示例中,使用兼容CAN2.0B的独立CAN协议控制器IC——MCP2515,该协议控制器的详细资料链接都页面[2],在页面[3]将会看到更多中CAN2.0B和CAN FD的独立协议控制器, 对于我们的目的选择使用那种CAN协议控制器并无本质区别,但是作为量产的CAN网络节点产品来说,建议使用兼容CAN FD标准的控制器更为合理。 MCP2515的内部结构参加图8.16。 考虑BlueFi的40P扩展接口仅有3.3V供电电源,而且所有功能扩展接口的逻辑电平电压都采用3.3V,独立的CAN协议控制器MCP2515是一种宽工作电压的IC(允许2.7~5.5V), 我们可以使用BlueFi的40P扩展接口上的3.3V和GND为其供电,那么CAN总线收发器与CAN协议控制器之间的逻辑接口电压也必须采用3.3V的, 如果CAN总线收发器的工作电压也采用3.3V,意味着我们的CAN接口拓展板采用3.3V单工作电源,这样的设计更为简化。 在页面[4]中我们能找到很多种CAN总线收发器,SN65HVD230是价格较低的一种支持3.3V供电的CAN总线收发器。
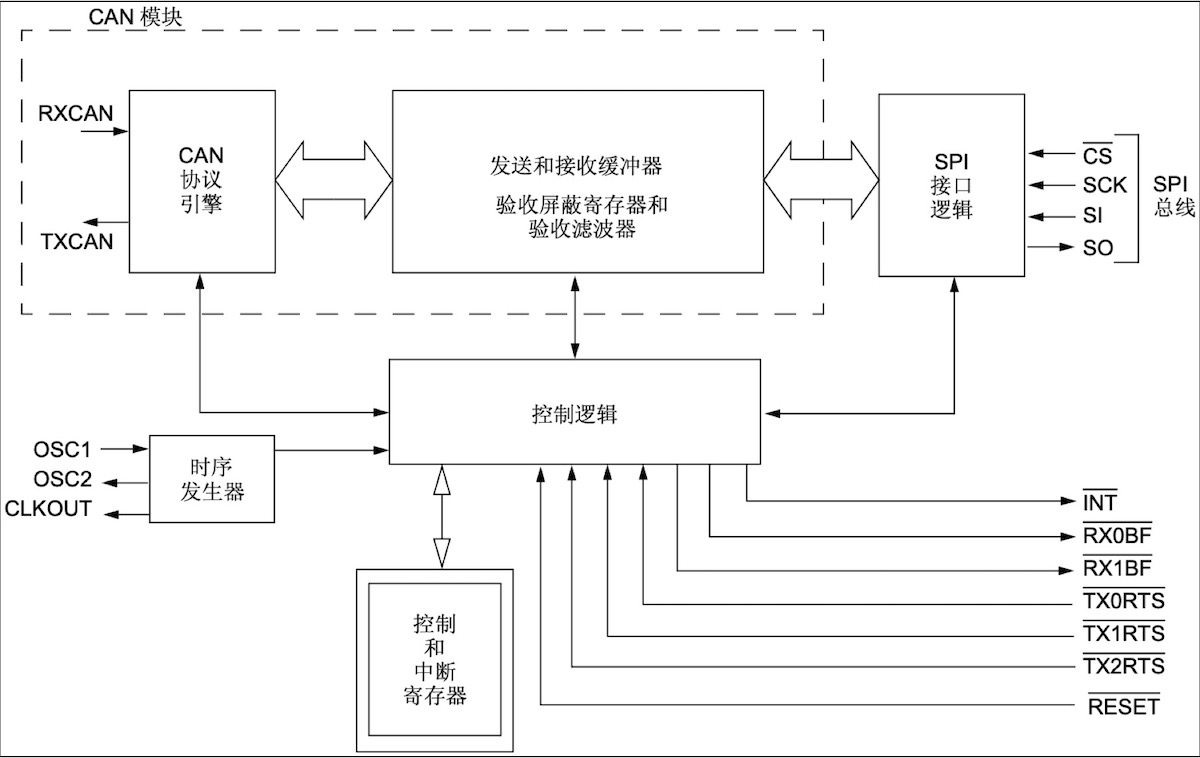
图8.16 兼容CAN2.0B的CAN协议控制器——MCP255的内部结构
图8.15中将完整的CAN拓展板的电路原图分割为4个部分:BlueFi拓展接口、CAN协议控制器、CAN总线收发器和CAN总线接口插座。 由于整个拓展板采用单3.3V供电,这个接口设计变得极为简单。独立的CAN协议控制器使用SPI接口与BlueFi主控制器(nRF52840)连接, CAN协议控制器与CAN总线收发器之间的连接是常规的,CAN总线接口插座使用易插拔的形式。每个拓展板上都设计2个CAN总线接口插座, 目的是方便连线,三个BlueFi-CAN拓展板之间使用CAN总线通讯的实物连线如图8.17所示。从图8.15可以看出,两个CAN总线接口的插座上的CAN总线信号是相互连通的, 接线时只要注意区分CAN_HI和CAN_LO两个信号即可。
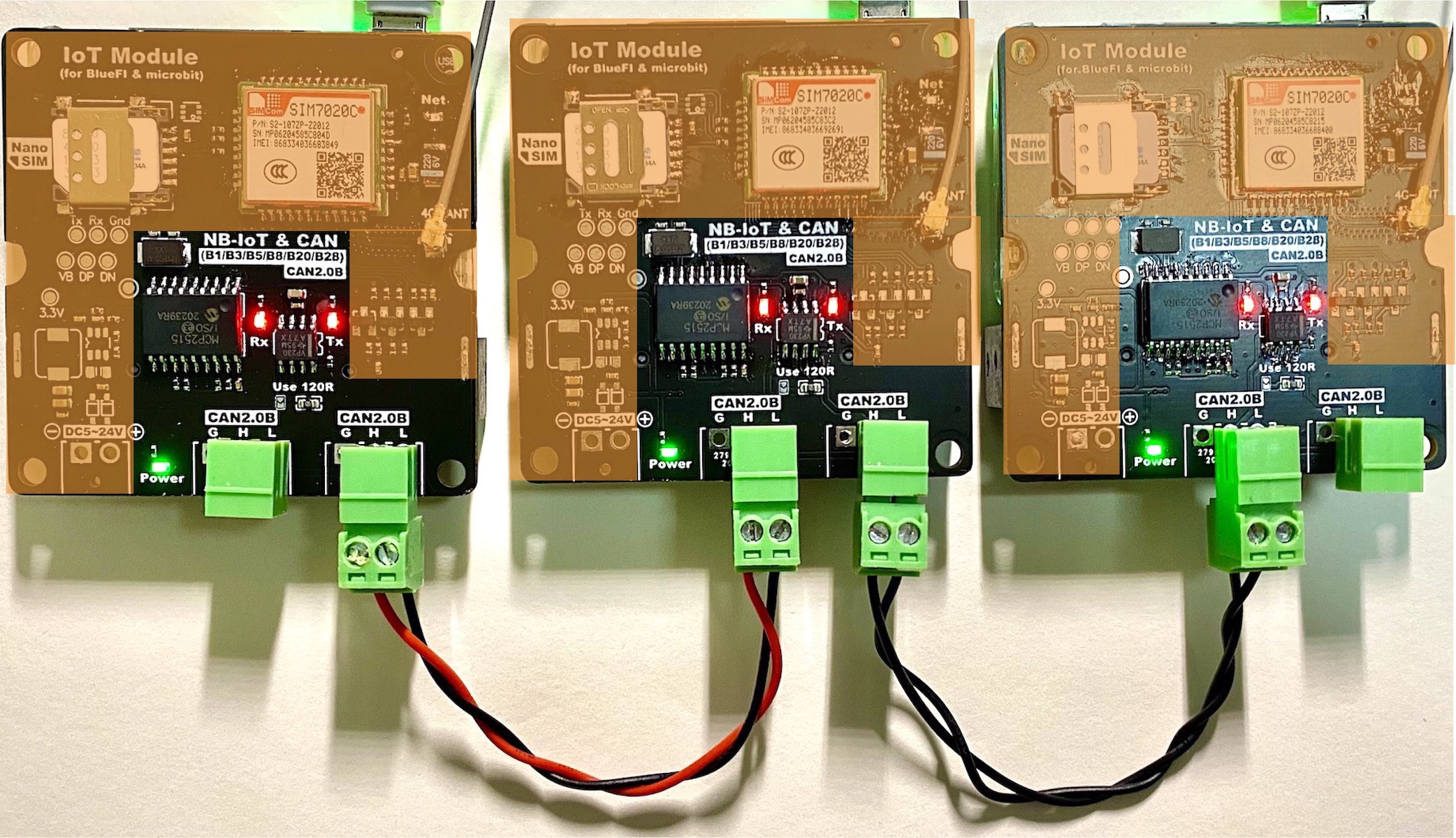
图8.17 三个BlueFi-CAN拓展板之间使用CAN总线通讯的实物连接
由于BlueFi的主控制器(nRF52840)片内没有CAN协议控制器和CAN总线收发器等功能单元,我们使用SPI接口的独立CAN协议控制器IC为BlueFi扩展出CAN接口, 整个CAN拓展板使用单3.3V供电电源使得拓展电路的设计非常简单。
当然,许多面向工业控制应用领域的MCU/SoC片上都带有硬件CAN协议控制器单元,譬如ARM Cortex-M3/M4/M4F内核的LPC1769(来自NXP半导体)、 STM32F1xx/4xx(来自ST半导体)等片上都有1个或2个独立的CAN协议控制器单元,再如ESP32或ESP32-S2(来自上海乐鑫)片上带有一个CAN协议控制器单元, 在乐鑫的文档中,CAN协议控制器单元被称作TWAI(即Two-Wire Automotive Interface的缩写)。 事实上,CAN协议控制器是由一个多状态复杂时序逻辑电路和多个FIFO缓存组成的数字电路功能单元,很容易集成到MCU/SoC内部,或者使用FPGA内部逻辑单元和存储器来实现。 片上CAN协议控制器单元通过片内并行总线(如APB)与CPU内核和RAM互联,这样的接口在访问速度方面远超SPI等接口,而且片上功能单元的寄存器和RAM之间很容易通过DMA方式传输数据。 当我们需要缩短CAN总线接口的数据传输延迟时,使用片上CAN协议控制器将是首选的。
图8.18是使用片上CAN协议控制器时的CAN总线节点上的硬件接口电路示例。使用片上CAN协议控制器时需要仔细查阅MCU/SoC的技术文档确定CAN接口引脚的分配规则, 以及逻辑电平的电压等。
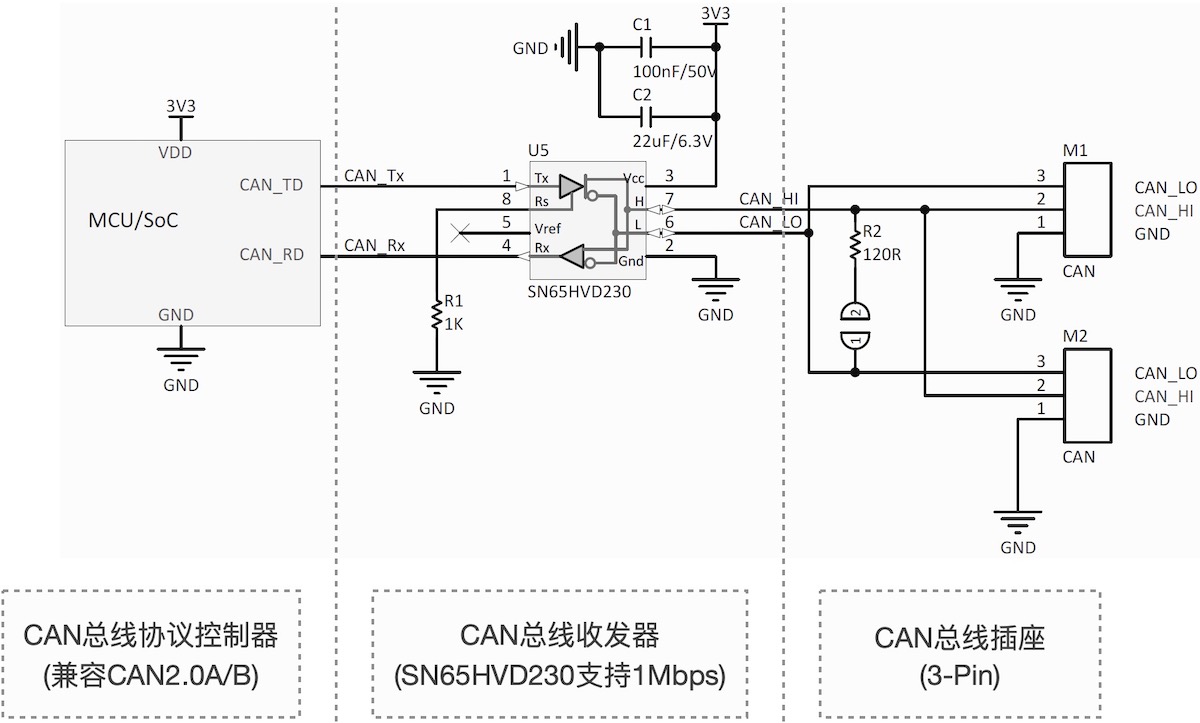
图8.18 使用MCU/SoC片上CAN协议控制器的CAN总线节点的硬件接口电路示例
对比图8.15和图8.18的示例电路,或许你会问“为什么不将CAN总线收发器集成到MCU/SoC内部呢?” 考虑CAN总线收发器的一对差分信号比较特殊, 无法与其他I/O引脚通用。
本节以分层的CAN总线协议栈作为对照,引入CAN网络节点的硬件设计模型,并简要分析CAN总线收发器的前后级接口,然后参照硬件设计模型给出BlueFi-CAN拓展板的硬件设计。 虽然我们仅给出一种最简单的兼容CAN2.0B标准的CAN网络节点的硬件设计,而且尽可能地简化电路设计,CAN总线接口方面并未考虑电磁辐射、浪涌电流和静电放电等保护措施。 在CAN总线的各类应用场景中,无论是工业的或是汽车领域,抗高低温损伤、抗辐射干扰、抗静电损坏,以及防水等设计都十分重要, 从数据帧的传输原理和协议角度可以看出CAN总线本身具有很强的抗干扰能力和很高的可靠性,但实际应用系统的设计也会严重影响CAN总线的性能。
参考文献:
[1] https://www.ti.com/lit/pdf/sloa101 [2] https://www.microchip.com/wwwproducts/en/MCP2515 [3] https://www.microchip.com/ParamChartSearch/Chart.aspx?branchID=1939 [4] https://www.ti.com/interface/can-lin-transceivers-sbcs/overview.html [5] https://www.ti.com/document-viewer/SN65HVD230/datasheet/features-slos3463030#SLOS3463030



















 1984
1984

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











