







 本文探讨了阿克曼转向几何在汽车中的应用,涉及内轮转角、外轮转角和转弯半径的关系。同时,介绍了运动学在预测车辆状态的作用,以及如何通过数学近似简化计算,如在方向盘30度转向时正切函数的近似误差。
本文探讨了阿克曼转向几何在汽车中的应用,涉及内轮转角、外轮转角和转弯半径的关系。同时,介绍了运动学在预测车辆状态的作用,以及如何通过数学近似简化计算,如在方向盘30度转向时正切函数的近似误差。
1. 阿克曼模型
阿克曼转向几何是汽车上转向的一种实现方法,在转弯的时候,内侧轮胎转弯半径小于外侧轮胎;该种转向方式比内外侧转弯半径一致的汽车行驶起来更稳定。
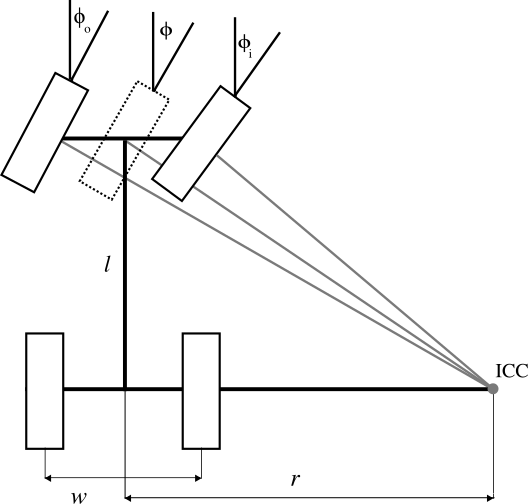
w: 后轮胎之间间隔 l:前后轴距 : 内轮转角
: 外轮转角 r: 转弯半径
通过上图的几何关系,很容易推导出以下公式:
可以得到以下方程:
同时可以得出以下方程:
即
即
这些方程有一个特殊情况,为0,因为
没有定义。但是由于
,可以得出下面的公式:
2. 运动学
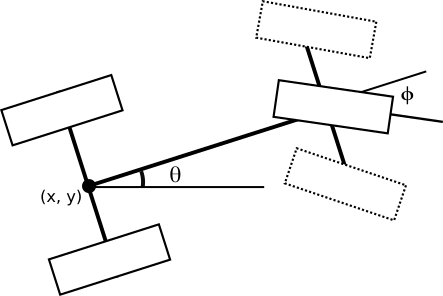
运动学的作用是预测未来的状态。对于阿克曼模型,旋转中心在后轮上。对于给定速度v
在数学和工程领域,常常需要对复杂的数学函数进行近似,以便在计算中更容易处理。正切函数 tan(θ) 是一个三角函数,通常情况下需要使用计算器或计算机来计算其精确值。但是,在某些情况下,可以近似这个函数,以减少计算的复杂性。对于 tan(θ) 进行简化时,当车辆的方向盘在 30 度转向锁定位置时,这个近似误差约为 3 度。

















 4445
4445

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









