







 本文介绍了如何使用 SimpleBaseLine 方法在人体姿态估计任务中生成和显示 heatmap,包括初始化 dataset、生成目标热力图和关键点可视化步骤。通过实例代码展示了如何将关键点坐标转换为高斯分布的热图,并在图像上展示出来。
本文介绍了如何使用 SimpleBaseLine 方法在人体姿态估计任务中生成和显示 heatmap,包括初始化 dataset、生成目标热力图和关键点可视化步骤。通过实例代码展示了如何将关键点坐标转换为高斯分布的热图,并在图像上展示出来。
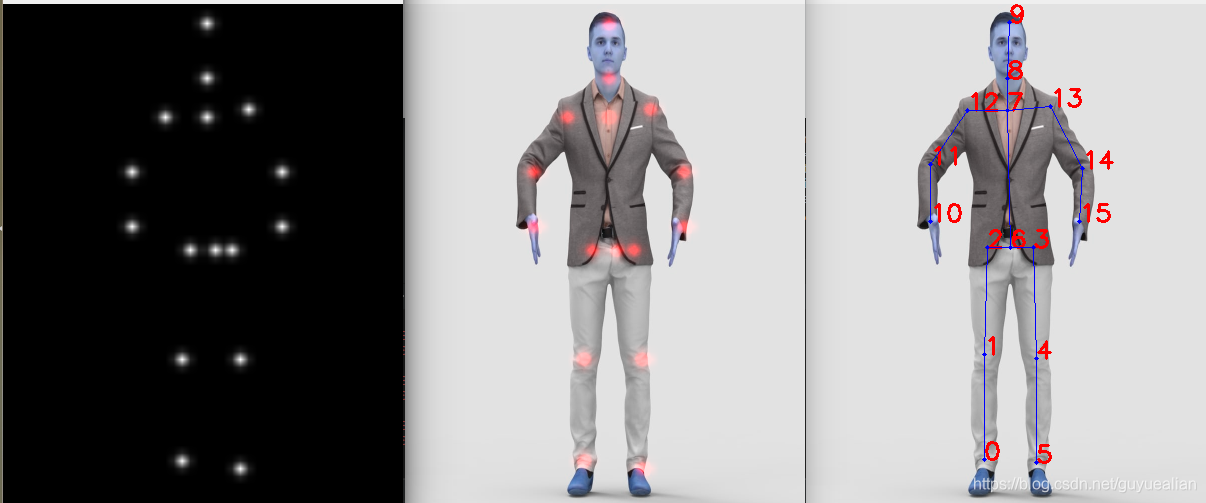
人体姿态估计-生成heatmap的方法
参考Simple BaseLine生成HeatMap的方法,这里整理进行显示,方便可视化:
Simple BaseLine生成HeatMap的方法:human-pose-estimation.pytorch/JointsDataset.py at master · microsoft/human-pose-estimation.pytorch · GitHub
实现代码如下:
from utils import image_processing模块可以在鄙人github中:python-learning-notes/image_processing.py at master · PanJinquan/python-learning-notes · GitHub
# -*- coding: utf-8 -*-
"""
# --------------------------------------------------------
# @Project: torch-Human-Pose-Estimation-Pipeline
# @Author : panjq
# @E-mail : pan_jinquan@163.com
# @Date : 2020-09-30 10:39:57
# --------------------------------------------------------
"""
import copy
import cv2
import numpy as np
class JointsDataset():
def __init__(self, num_joints,
image_size=[192, 256],
heatmap_size=[48, 64],
transform=None,
target_type='gaussian'):
"""
:param num_joints:
:param image_size:
:param heatmap_size:
:param transform:
:param target_type:
"""
self.num_joints = num_joints
self.image_size = np.asarray(image_size)
self.heatmap_size = np.asarray(heatmap_size)
self.target_type = target_type
self.sigma = 0.5
self.transform = transform
def generate_target(self, joints, joints_vis):
"""
:param joints: [num_joints, 3]
:param joints_vis: [num_joints, 3]
:return: target(num_joints,heatmap_size[0],heatmap_size[1]), is target_heatmap
target_weight(1: visible, 0: invisible)
"""
target_weight = np.ones((self.num_joints, 1), dtype=np.float32)
target_weight[:, 0] = joints_vis[:, 0]
assert self.target_type == 'gaussian', 'Only support gaussian map now!'
if self.target_type == 'gaussian':
target = np.zeros((self.num_joints, self.heatmap_size[1], self.heatmap_size[0]), dtype=np.float32)
tmp_size = self.sigma * 3
for joint_id in range(self.num_joints):
feat_stride = self.image_size / self.heatmap_size
mu_x = int(joints[joint_id][0] / feat_stride[0] + 0.5)
mu_y = int(joints[joint_id][1] / feat_stride[1] + 0.5)
# Check that any part of the gaussian is in-bounds
ul = [int(mu_x - tmp_size), int(mu_y - tmp_size)]
br = [int(mu_x + tmp_size + 1), int(mu_y + tmp_size + 1)]
if ul[0] >= self.heatmap_size[0] or ul[1] >= self.heatmap_size[1] or br[0] < 0 or br[1] < 0:
# If not, just return the image as is
target_weight[joint_id] = 0
continue
# # Generate gaussian
size = 2 * tmp_size + 1
x = np.arange(0, size, 1, np.float32)
y = x[:, np.newaxis]
x0 = y0 = size // 2
# The gaussian is not normalized, we want the center value to equal 1
g = np.exp(- ((x - x0) ** 2 + (y - y0) ** 2) / (2 * self.sigma ** 2))
# Usable gaussian range
g_x = max(0, -ul[0]), min(br[0], self.heatmap_size[0]) - ul[0]
g_y = max(0, -ul[1]), min(br[1], self.heatmap_size[1]) - ul[1]
# Image range
img_x = max(0, ul[0]), min(br[0], self.heatmap_size[0])
img_y = max(0, ul[1]), min(br[1], self.heatmap_size[1])
v = target_weight[joint_id]
if v > 0.5:
target[joint_id][img_y[0]:img_y[1], img_x[0]:img_x[1]] = g[g_y[0]:g_y[1], g_x[0]:g_x[1]]
else:
raise Exception("Error:{}".format(self.target_type))
return target, target_weight
def create_joints_3d(num_joints, joint):
joints_3d = np.zeros((num_joints, 3), dtype=np.float)
joints_3d_vis = np.zeros((num_joints, 3), dtype=np.float)
for ipt in range(num_joints):
joints_3d[ipt, 0] = joint[ipt, 0]
joints_3d[ipt, 1] = joint[ipt, 1]
joints_3d[ipt, 2] = 0
if joint[ipt, 0] > 0 and joint[ipt, 1] > 0:
t_vis = 1
else:
t_vis = 0
joints_3d_vis[ipt, 0] = t_vis
joints_3d_vis[ipt, 1] = t_vis
joints_3d_vis[ipt, 2] = 0
return joints_3d, joints_3d_vis
def vis_joint_in_images(image, joints_3d, joints_3d_vis, skeleton):
joints = joints_3d[:, 0:2]
# c = np.mean(joints,axis=0)
image = image_processing.draw_key_point_in_image(image, [joints], skeleton)
image_processing.cv_show_image("dst_image", image)
def vis_heatmap_in_image(heatmap, image, waitKey=0):
h, w, d = image.shape
resize_heatmap = []
for map in heatmap:
map = image_processing.resize_image(map, resize_height=h, resize_width=w)
resize_heatmap.append(map)
heatmap = np.asarray(resize_heatmap)
heatmap = np.sum(heatmap, axis=0)
heatmap = np.clip(heatmap, 0, 1)
image_processing.cv_show_image("heatmap", heatmap, waitKey=30)
image = np.asarray(image / 255.0, dtype=np.float32)
image[:, :, 0] = image[:, :, 0] + heatmap
image_processing.cv_show_image("heatmap_in_image", image, waitKey=waitKey)
if __name__ == "__main__":
from utils import image_processing
skeleton = [[0, 1], [1, 2], [3, 4], [4, 5], [2, 6], [6, 3], [12, 11], [7, 12],
[11, 10], [13, 14], [14, 15], [8, 9], [8, 7], [6, 7], [7, 13]]
joint = np.asarray([[357.6537, 728.02435],
[357.6537, 561.3204],
[363.4021, 388.86795],
[455.3767, 388.86795],
[461.12512, 567.0688],
[461.12512, 733.77277],
[409.3894, 388.86795],
[403.641, 170.42822],
[403.641, 118.69249],
[406.5152, 29.592072],
[248.4338, 348.62906],
[248.4338, 256.65442],
[323.1632, 170.42822],
[489.86722, 164.6798],
[553.09973, 262.40283],
[547.3513, 348.62906]])
num_joints = len(joint)
image_path = "data/test/test1.jpg"
image = cv2.imread(image_path)
h, w, _ = image.shape
image_size = np.asarray([400, 500])
scale = image_size / [w, h]
joint = joint * scale
image = image_processing.resize_image(image, resize_width=image_size[0], resize_height=image_size[1])
joints_3d, joints_3d_vis = create_joints_3d(num_joints, joint)
joints_obj = JointsDataset(num_joints=num_joints, image_size=image_size, heatmap_size=[48, 64])
target_heatmap, target_weight = joints_obj.generate_target(joints=joints_3d, joints_vis=joints_3d_vis)
vis_heatmap_in_image(target_heatmap, image, waitKey=0)
vis_joint_in_images(image, joints_3d, joints_3d_vis, skeleton)
参考资料:
《人体骨骼关键点检测中的heatmap 与vectormap 生成》人体骨骼关键点检测中的heatmap 与vectormap 生成_终结大笨狗的博客-CSDN博客
更多AI博客,请参考:
人体关键点检测需要用到人体检测,请查看鄙人另一篇博客:2D Pose人体关键点实时检测(Python/Android /C++ Demo)_pan_jinquan的博客-CSDN博客



















 517
517

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











