






 本文介绍了使用DVXplorer事件相机的初步体验,包括镜头调整、噪声问题及解决方案。作者通过设置敏感度参数,显著改善了噪声问题。相较于DAVIS346,DVXplorer在噪声控制上表现出更大的挑战,但通过适当调整,仍能获得较好的效果。作者建议直接从官网购买相机,以获取更合理的价格和更好的技术支持。
本文介绍了使用DVXplorer事件相机的初步体验,包括镜头调整、噪声问题及解决方案。作者通过设置敏感度参数,显著改善了噪声问题。相较于DAVIS346,DVXplorer在噪声控制上表现出更大的挑战,但通过适当调整,仍能获得较好的效果。作者建议直接从官网购买相机,以获取更合理的价格和更好的技术支持。
继之前《ROS实验笔记之——DAVIS346测试》测试了DAVIS346后,最近团队又购买了dvxplorer。长相上跟davis346差不多。但是实际上对于噪声的敏感程度完全不是一个等级
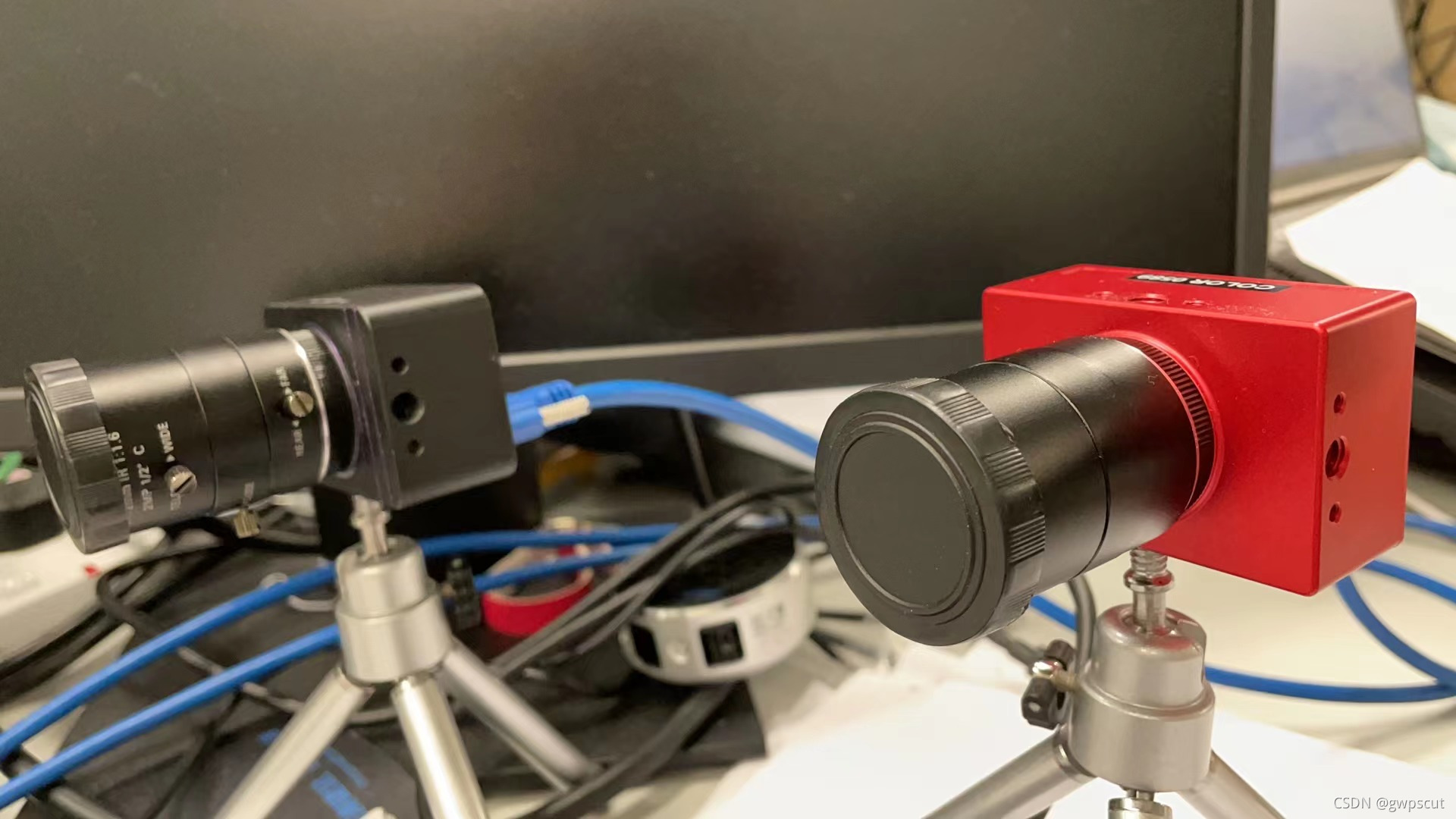
首先需要调镜头。如下图所示。中间为光圈,需要调到最大。最后的为远近,需要调到最远,剩余的就是焦距(最外面的)

注意不要漏了这个东东

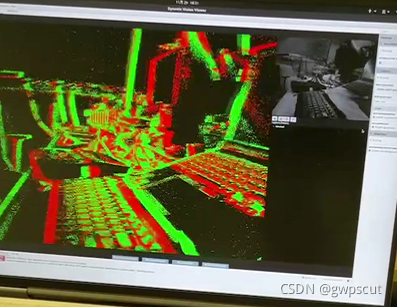
然后可以采用dv-gui或者dvs render来进行可视化。但是一开始可视化的时候,效果很差,
哪怕不动噪声也很大~~~

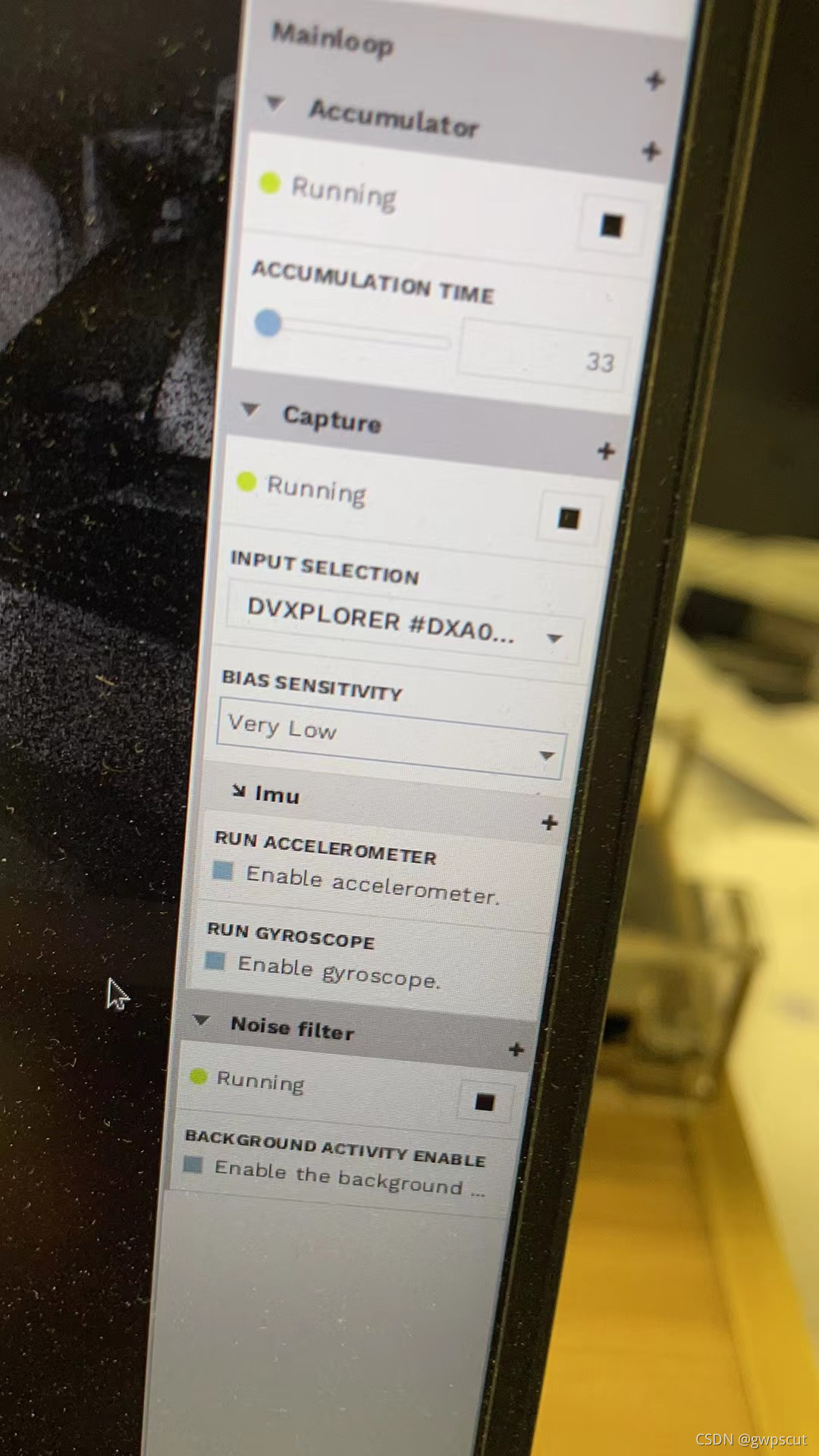
需要设置敏感度(dvs render也有对应的参数可以设置)
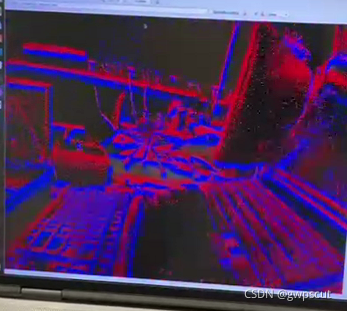
经过去噪后,效果大概就这样啦
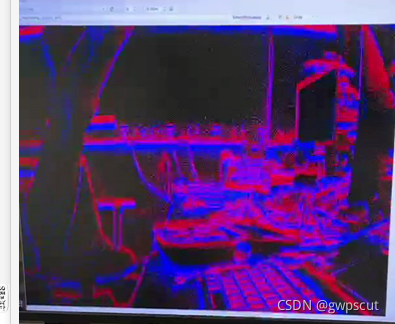
比起davis346,确实噪声大些
至于购买此相机,强烈建议到官网买。原因有二:
1、官网比大陆的代理便宜差不多一倍
2、大陆代理对这个完全不懂。
3、千万不要购买智科特机器人的事件相机

















 1264
1264

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









