






一、激光雷达基本原理
激光雷达(LiDAR,Light Detection and Ranging)是一种用于精确测距的激光探测传感器。本质上是通过激光(电磁波)的反射进行测距,在一定程度上和毫米波、超声波等探测手段类似。
1.激光雷达系统
激光雷达系统通常包括TX、RX、处理器以及扫描器件。
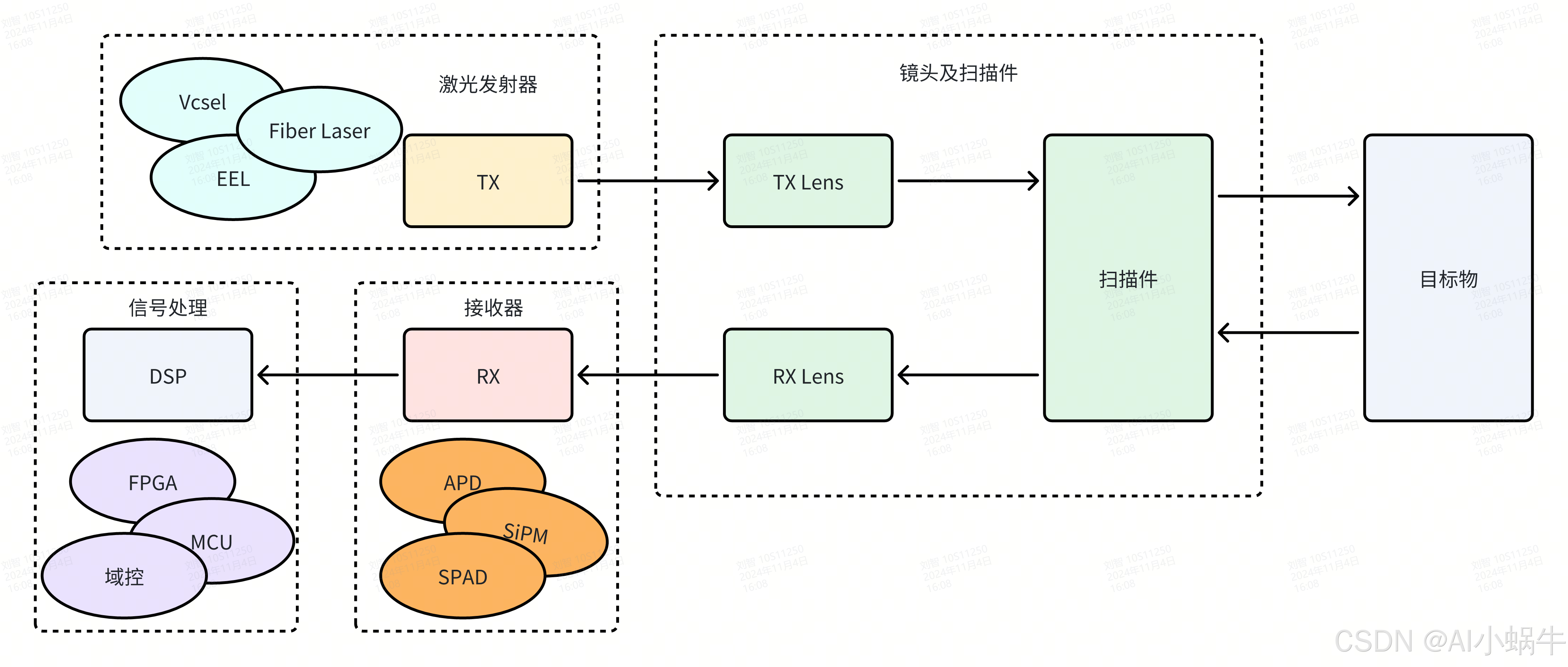
通常的激光雷达通过TX端发射激光,并通过镜头以及扫描件照射到目标物上,再接收目标物辐射的能量,根据接收信号来实现测距。
2.测距方式
激光雷达的测距方式主要有三角测距法,直接飞行量法(dTOF,Direct Time-of-Flight),相干测距法(FMCW,Frequency Modulated Continuous Wave),间隔飞行测量法(iTOF,Indirect Time-of-Flight)
2.1 三角测距法
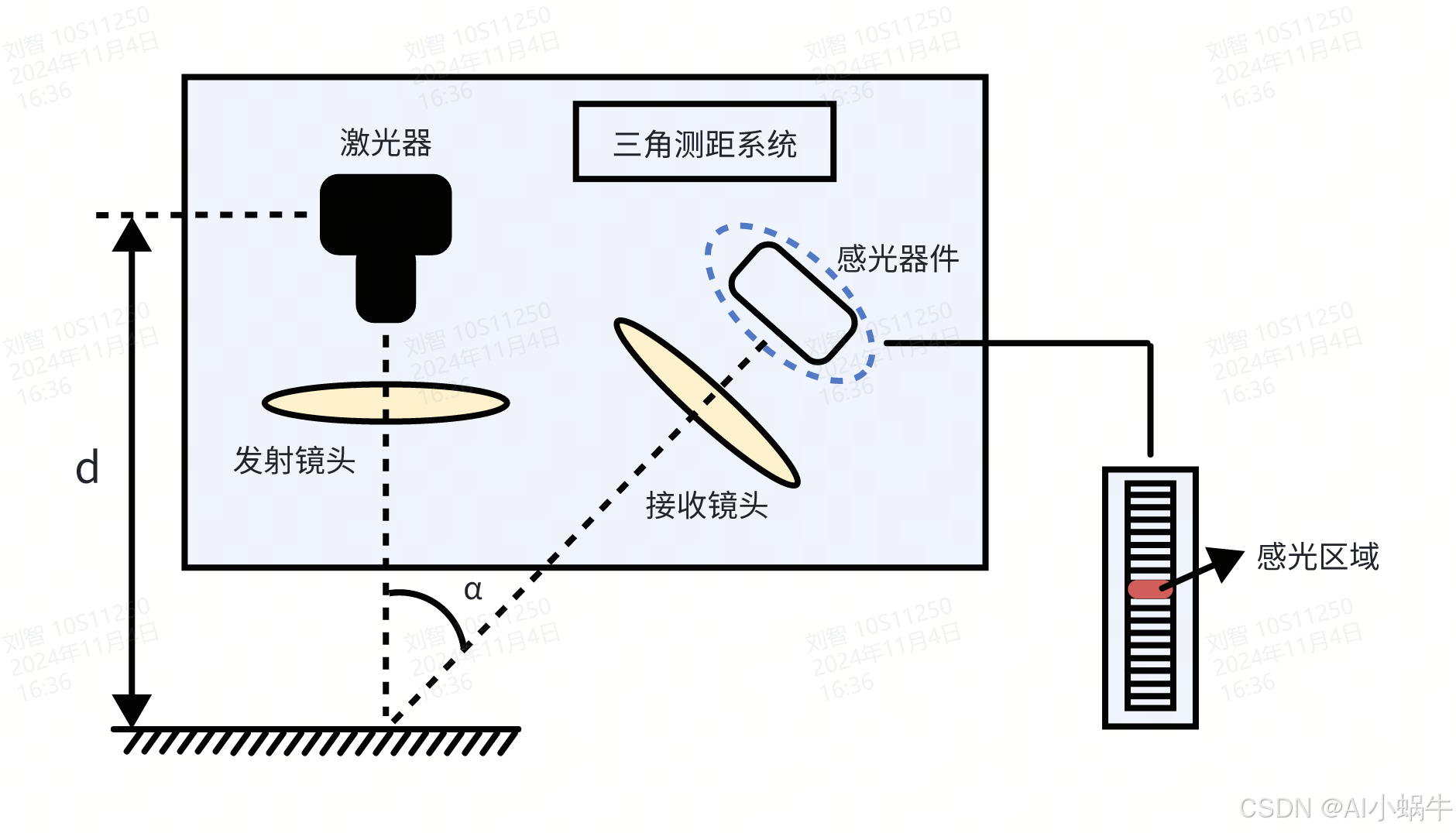
三角测量法,主要根据三角形原理,通过发射激光到目标物的距离不同,进而引起
变化,这样感光器件的感光位置也会发生变化。因此根据接收到信号的感光区域计算出目标物距离
。这种方式的测量精度较高,但测量范围相对较近,一般适用于近距离的测量,例如机器人在室内环境中的导航、工业生产中的近距离检测等。
2.2 直接飞行测量法(DTOF)
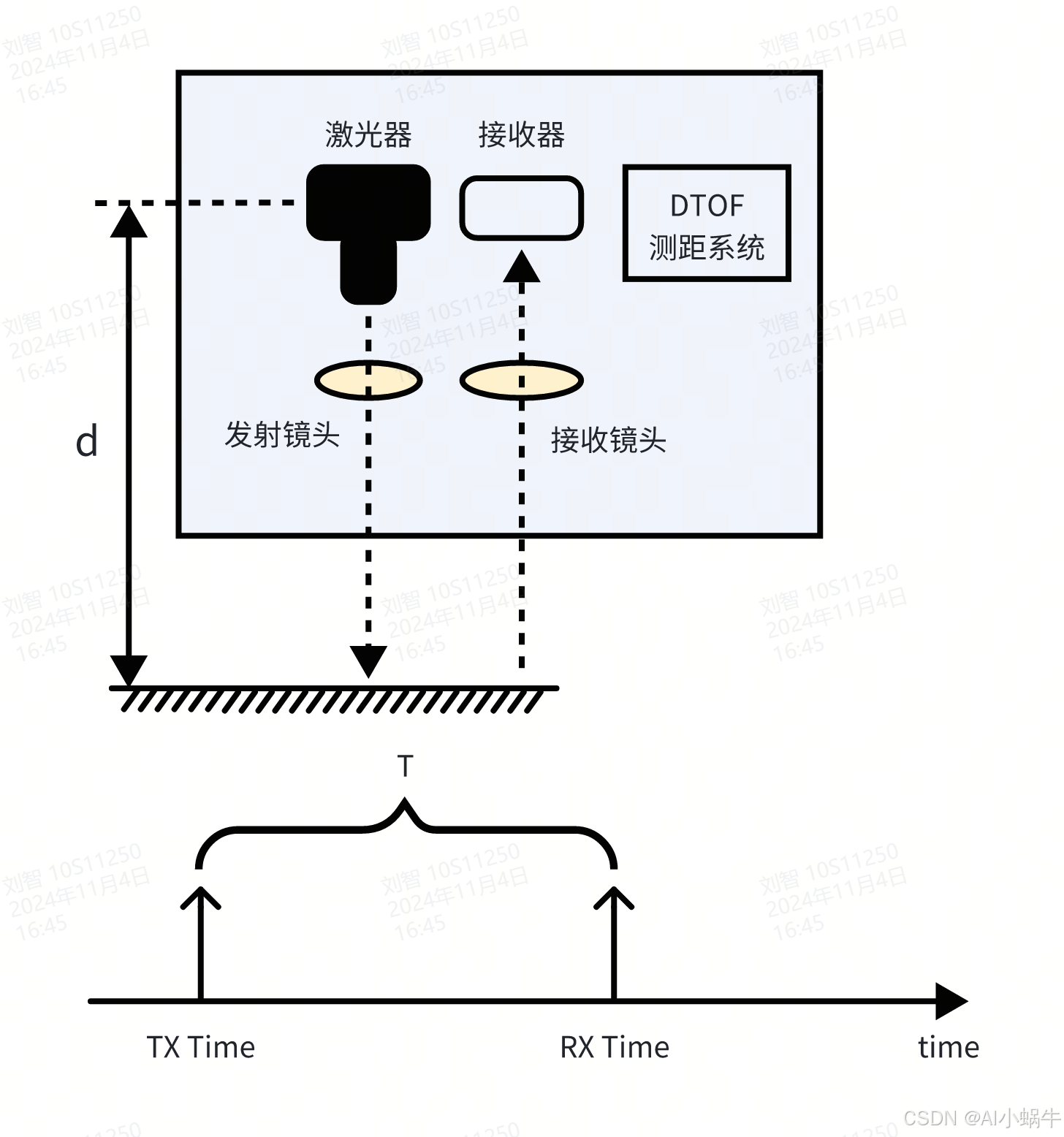
DTOF测距,主要根据发光时间与接收时间之间的时间差T,TX镜头与RX镜头之间的中心距很小,通常只有几厘米,根据如下公式:
可以计算出目标物的距离,具有响应速度快、探测精度高的优势,可应用于各种场景,是目前比较常用且主流的测距方式,适用于远距离的测量,比如自动驾驶领域中对车辆周围环境的探测、地形测绘等。
2.3 相干测距法(FMCW)
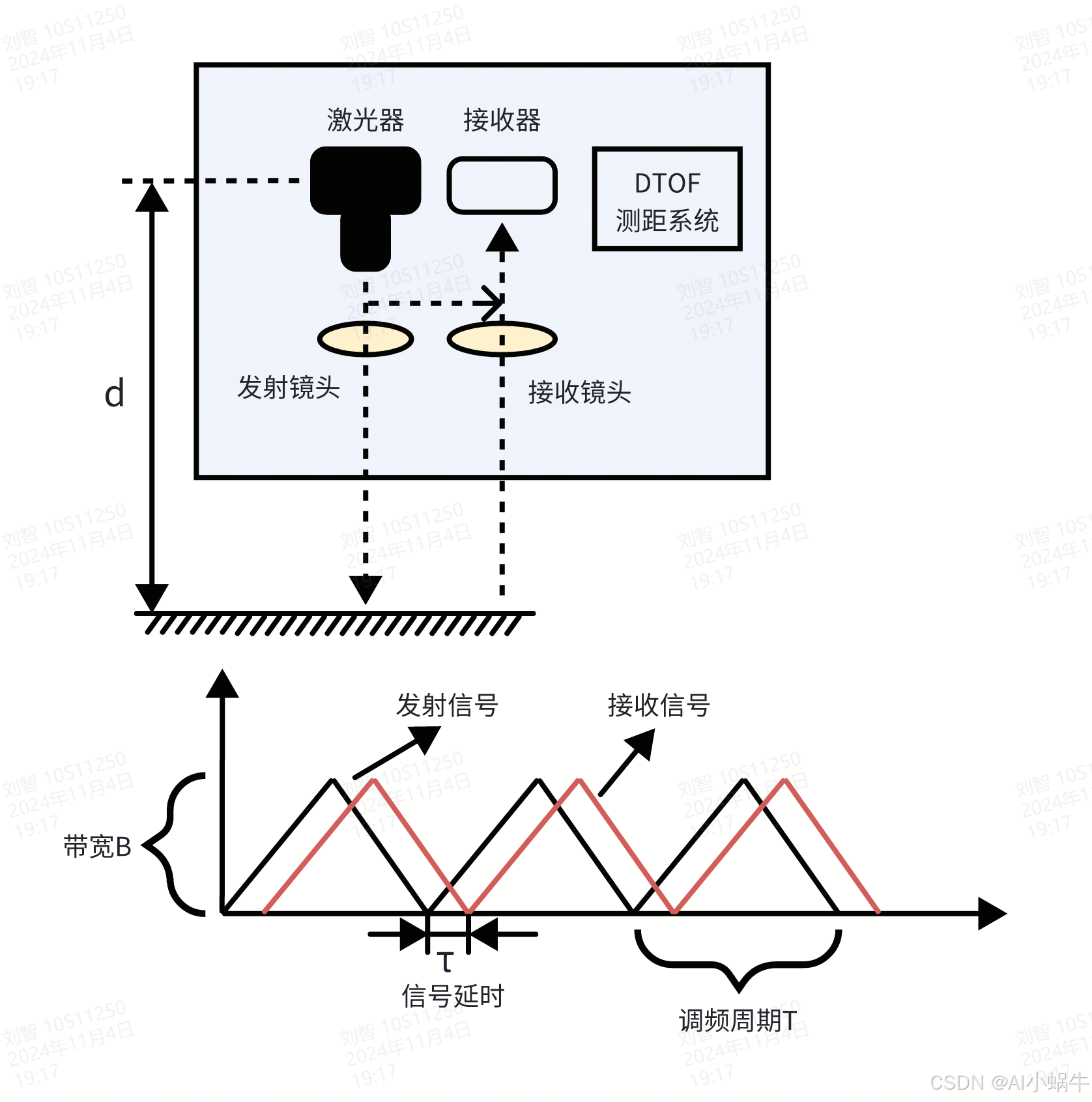
对光波的强度进行调制(如正弦波或三角波等),使光波在投射到物体后返回探测器的过程中,在光强波形上形成一个相位差。通过测量相位差,可以间接获取光的飞行时间,进而反推出飞行距离。具体如下:
该方法的数据采集速度较快,但在长距离测量时,信号的衰减和干扰可能会影响测量精度,所以主要适用于中短距离的测量场景。
2.4 iTOF
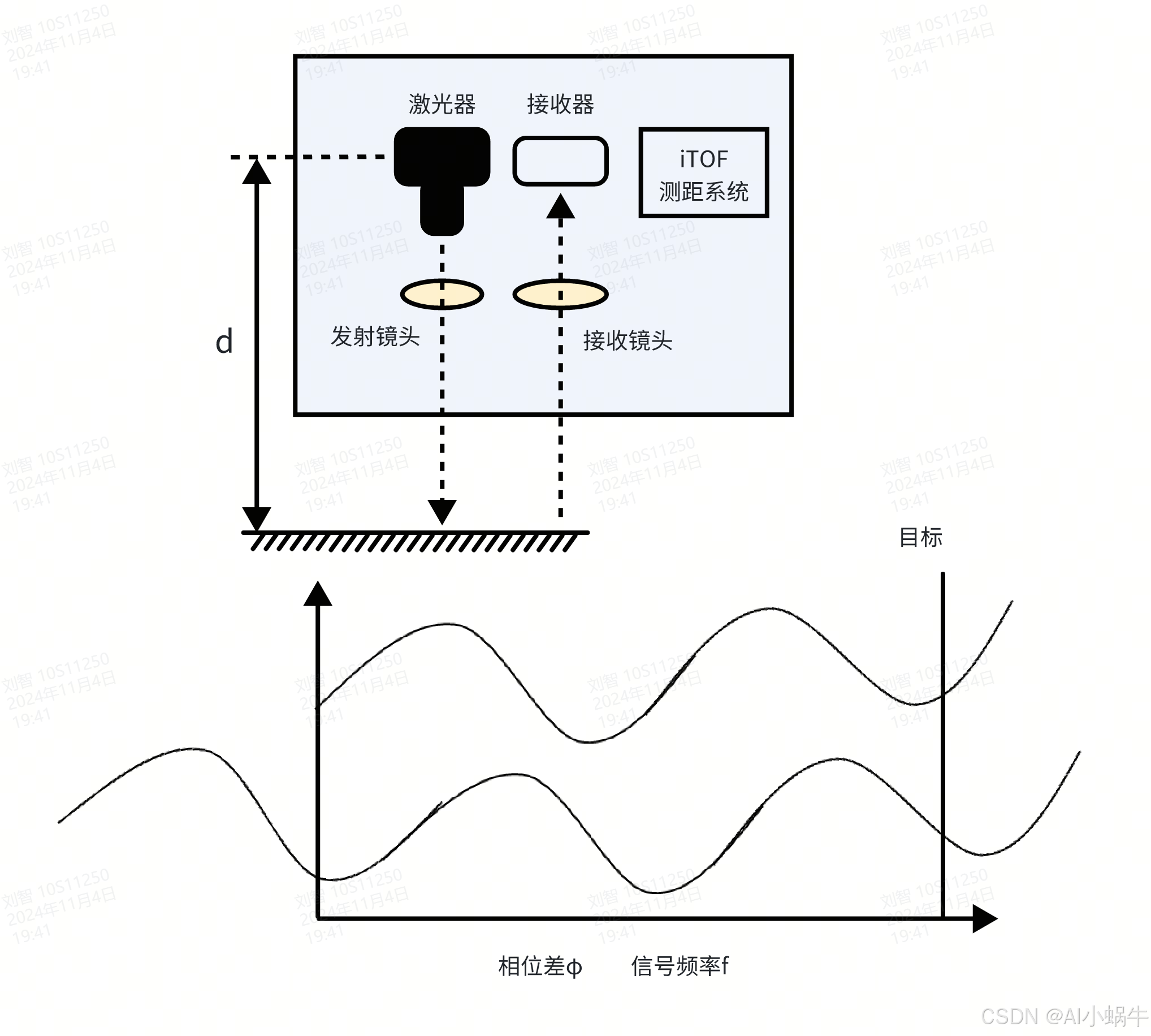
iTOF通常用测相位偏移的方法,即发射正弦波/方波与接收正弦波/方波之间的相位差实现测距。具体如下:
在中短距离测量中精度较高,相比直接测量飞行时间的 dToF方法,iToF 对器件的要求相对较低,信号处理难度也有所降低。iToF 测距方法在机器人导航、智能家居、虚拟现实、增强现实等领域有着广泛的应用,例如在智能机器人中用于感知周围环境物体的距离,以实现避障和导航。
二、dTOF激光雷达主流方案
目前车载激光雷达,有90%都是采用dTOF测距方案,下面一起来看看几种比较典型的激光雷达方案。
1.机械式激光雷达
| 禾赛Pandar128 | 速腾聚创 Ruby Plus |

|

|
| 128线;200m(200m@10%) ; FOV:360°x40° 水平角分辨率:0.1° 垂直角分辨率:0.125°(非均匀) | 128线;250m(240m@10% NIST) ; FOV:360°x40° 水平角分辨率:0.2°/0.4° 垂直角分辨率:up to 0.1°(非均匀) |
机械式激光雷达,可以实现360度环绕扫描,能够实现全方位感知。但是由于机械式雷达需要旋转部件,寿命较低,并且可靠性较差。目前机械式激光雷达大部分采用单发单收模式,即128线的激光雷达有128对收发,料堆得这么多,性能当然强,说实话我上我也行!!!除了可靠性问题,还有另一个问题,就是贵!贵!贵!价格上来说对比半固态和转镜的,只能说1台更比3台贵。基本上只有商用车还在用,乘用车主雷达基本是速腾、禾赛、华为、图达通霸榜,华为自产自销,图达通懂的都懂,所以现在上车的最多的就是AT128以及速腾M1,后面会介绍。
只能说机械式是旧时代的产物,新时代的乘用车,没有装你的位置啊。如果你这么想,那你就大错特错了,首先上面提到了,机械式单发单收的模式,如此堆料,贵!但是,禾赛已经在最新的机械式雷达上装了SPAD线/面阵,首先是不用堆料,价格打了下来。其次,AA工艺直接和做了火箭一样提升,为什么?因为以前单发单收,需要A128次,复杂程度谁A谁知道。现在直接上线/面阵,就A4次,只能说起飞。按照禾赛官网的信息,说AA工艺效率提升90%以上。
所以,机械式的时代还没有过去,这旧时代的霸主,还在不停的进化!!!
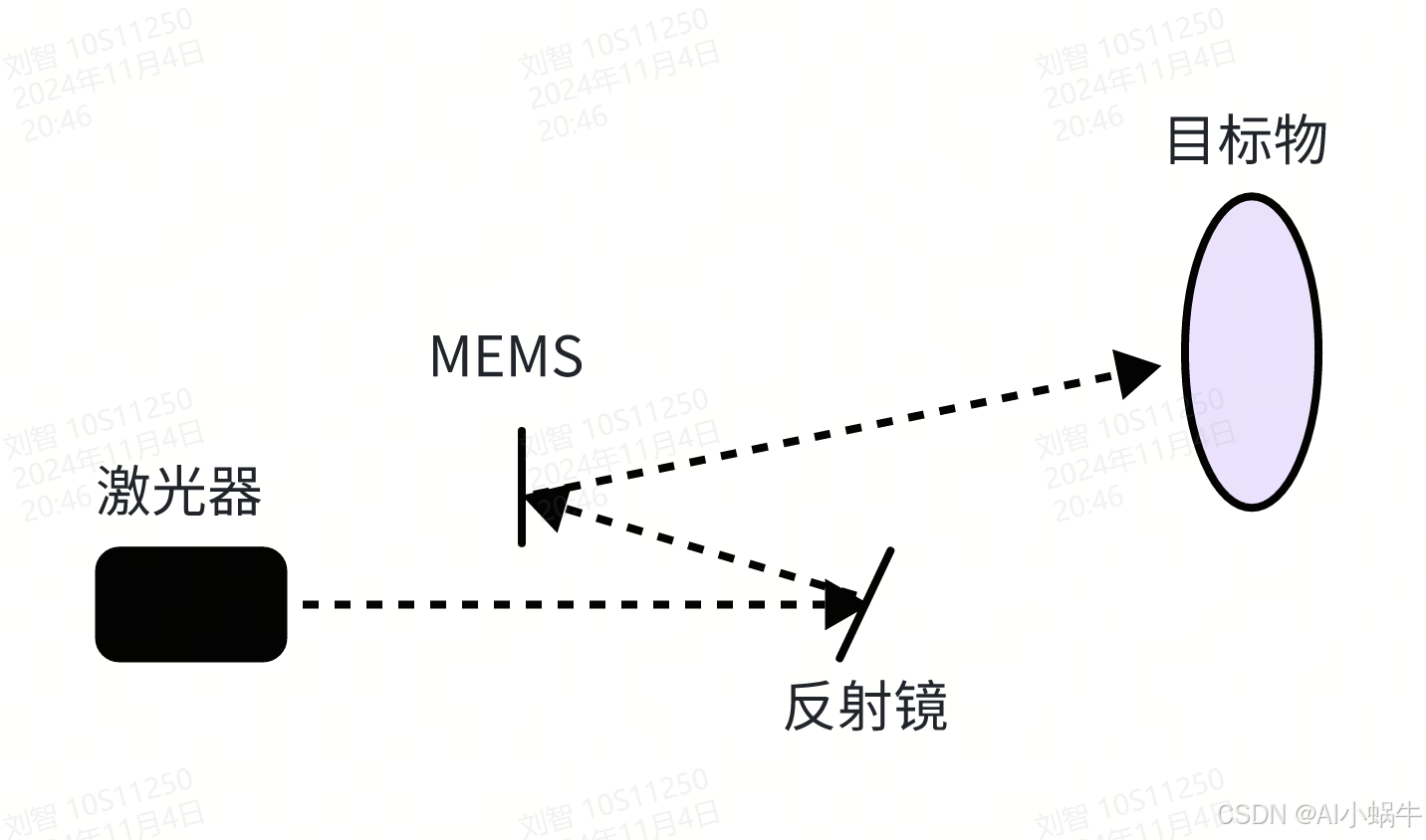
2.MEMS半固态激光雷达
讲完旧时代的产物,就不得不讲讲新时代的机皇之一——速腾M1。目前市面上卖的较好的半固态激光雷达产品。目前很多车上都用了,这里就不一一介绍了。
主要的原理就是激光器发光打到反射镜上,反射镜反射到MEMS上,在打到目标物上。MEMS尺寸越大,对应的FOV越大,目前速腾M1可以做到单个模组25°的横向视场。像这样的模组,M1里面还有3个,4兄弟拼成120°的视场。
摒弃了传统的扫描器件,转而使用谐振扫描的MEMS,可靠性有所提升。但是MEMS需要高频的谐振摆动,MEMS的寿命也不会很高,并且很难在高冲击环境中工作,快速运动过程中可能会出现运动飘移误差。瑕不掩瑜,M1还是当前的高性价比之王。
由于MEMS的研发是需要大量投入的,所以很多lidar厂商望而却步,但是速腾却在这条路上越走越远,走出了属于自己的巅峰之路。最新的速腾MX雷达,做的超小,超高性价比。只用了两个模组+扩角镜实现120度的横向视场覆盖。以及旗舰款产品速腾M3,可以实现500线,300m的超级感知,当然这个是不是真的这么好,在产品没有量产之前都还是需要画个大大的问号的。
3.转镜式激光雷达
如果说MEMS属于硬磕技术的艰难之路,那么转镜式就是一条相对轻松探索之路。如果有新的创业者入局激光雷达,要在MEMS与转镜式里面二选一,选择转镜式无疑是较好的选择,当然更好的选择是别进来,你问我为什么?太卷了!太卷了!太卷了!重要的事情说三遍,言归正传。
转镜式的激光雷达,相对好实现一些,转镜式分为1维转镜方案以及2维转镜方案,当前卖的好的都是1维转镜的,为什么?一个转镜的稳定性好,而且光路好设计。我们先来说说AT128的转镜方案,AT128可以称为真128线,在性能上,用过的人都说好。从前一直压M1一头,但是由于堆料严重,降本不如MEMS的有空间(我觉得哈,你要是觉得不对,那你对)。
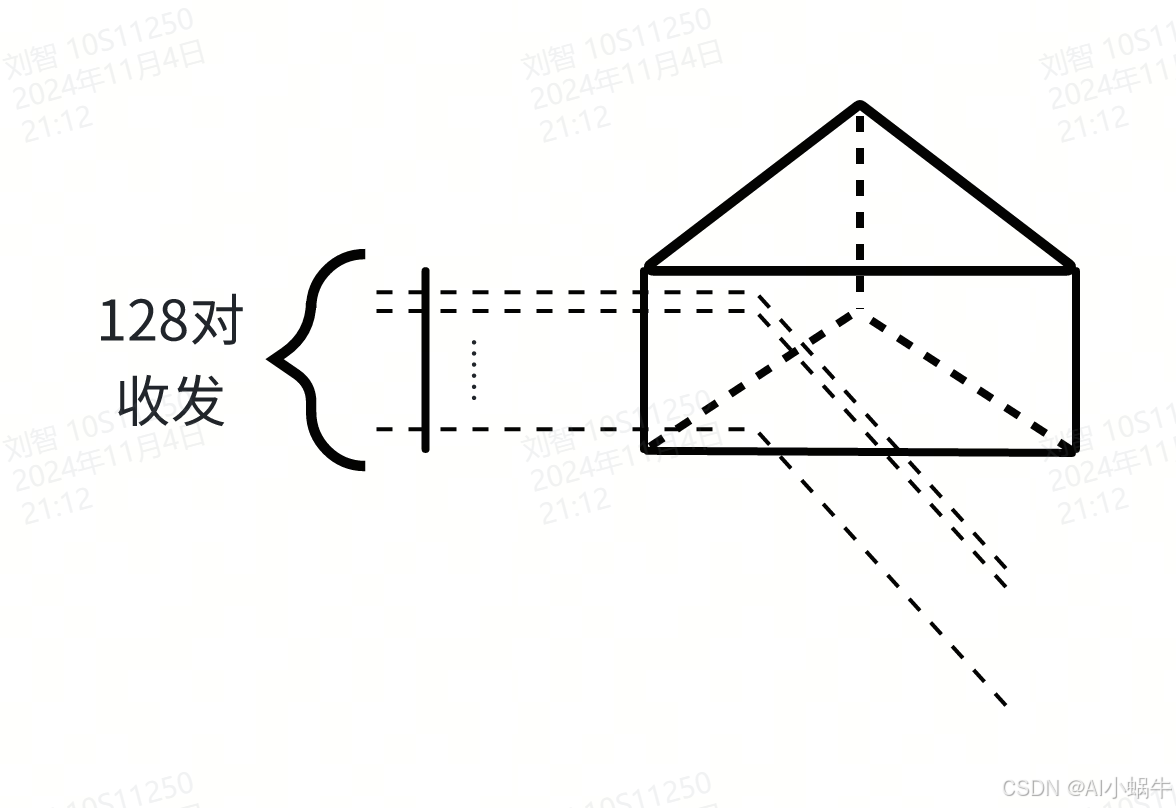
AT128有128对收发,每一对收发实现单线的点云显示,通过转镜的转动,实现对一行点云的扫描。当前大部分主雷达的帧率都是10HZ,转镜的频率为3.3HZ左右,转动速度远远小于MEMS的谐振频率,所以可靠性又高了。但是,128对收发实在太奢侈了,而芯片的发展都是向着集成化发展,早期探测都是用APD,后来进化成SiPM,现在更集成化的方案就是SPAD线阵/面阵。于是一批新型的激光雷达厂商在AT128的基础上进行优化,采用集成度更高的SPAD线阵+转镜方案。既能降本,又能保证高分辨率。
而这之中做的最快的就是华为,华为192线激光雷达为SPAD线阵(IMX459)+转镜方案。这个方案有很多厂家在做,虽然好入局,但是真的觉得能和华为打吗?而且,禾赛发布的AT512,据说是用IMX479实现的转镜方案,我只能说,你还在做459,禾赛已经开始搞479了,一步快步步快!!!有雪岭飞花下面的拆机华为96线的文章中,详细了描述了华为96的内部结构,主要是EEL+SPAD +转镜。不过192线应该已经是Vcsel了。
华为激光雷达真的遥遥领先吗?华为激光雷达详细拆解和系统方案分析(55图)_激光雷达192线比128领先多少-CSDN博客
转镜方案里面还有一个异类,他与现在的转镜方案放在一起显得格格不入,当然不只是因为体积,毕竟fiber laser即贵又大,显然图达通是实现了既要又要的。只不过,从之前的激光雷达头部供应商变的竞争力不强了。不过图达通显然也看明白了激光雷达的发展路线,开始发布灵雀系列产品,据我了解到的信息是二维转镜扫描,两个一维转镜。
转镜+SPAD面阵更容易实现多线束,高分辨率,近期的激光雷达产品大多数都在往这个方向上靠。而且降本空间更大,线阵SPAD实现纵向多线束,不需要堆料,AA工艺简化,低速电机相对高速谐振MEMS稳定性更高,怪不得AT128能和速腾M1分庭抗礼。
4.固态激光雷达
转镜方案还在进化,但可预见的是集成化会成为主流,这样有更好的降本空间,当整个接收面阵集成为1个芯片的时候,不需要任何的扫描固件,固态激光雷达应运而生。
发射端是集成芯片,接收端也是集成芯片,整个电路的设计变得十分简单。下图来自于速腾E1的宣传资料。
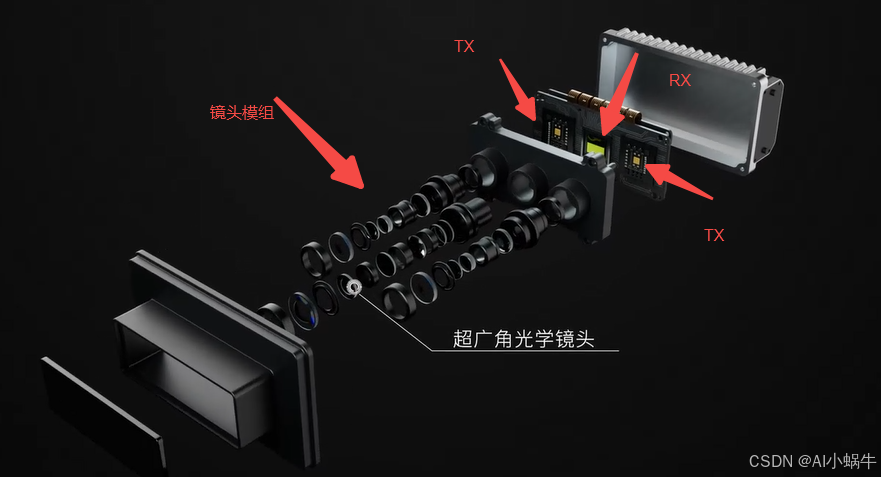
结构是真的简单,但目前的性能是真的测不远,主要原因就是采用Vcsel芯片,很难实现大功率。这可能也是为什么要用两个TX芯片的原因吧。即使E1这样高成熟度的全固态激光雷达也只能测距实现30m@10%,当然主要的一个原因是全固态雷达的视场大!一般的主雷达都是120°x25°,不过全固态禾赛的120°x75°,速腾的120°x90°,光覆盖的区域更大了,能量被分散了,所以测远能力弱了。但是由于没有转动器件,所以可靠性嘎嘎高。但是应用场景目前还是比较少,或者说还没有探索出合适的道路吧。而且测不远是硬伤,所以很多的液晶光栅光偏转技术也应运而生,还有OPA之类的技术,都可以实现固态光偏转,当技术不断迭代,也许激光雷达道路的终点会是应用了固态光偏转技术的全固态激光雷达?能够实现低成本、小体积、大FOV、远距离探测的究极激光雷达完全体?这是未可知的,但能够预见的是,当激光雷达传感器不断进化,不断完善的过程中,它自身优越的距离探测、夜视能力会逐渐在各个领域占领自己的一席之地。
本期内容到此结束,后续可能会根据自己在工作中遇到的问题,分点总结。如果小伙伴们有什么想了解与讨论的也可以留言,如果我看到我会的,也会写一写东西一起讨论。感谢大家的观看~

















 755
755

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









