









 本文详细介绍了使用Ziegler-Nichols和IAE方法对PID控制器的kp,ki,kd参数进行整定的过程,通过MATLAB仿真实验展示了两种方法的性能。着重讨论了这两种常见的PID参数整定策略及其在控制系统中的应用。
本文详细介绍了使用Ziegler-Nichols和IAE方法对PID控制器的kp,ki,kd参数进行整定的过程,通过MATLAB仿真实验展示了两种方法的性能。着重讨论了这两种常见的PID参数整定策略及其在控制系统中的应用。
目录
1.课题概述
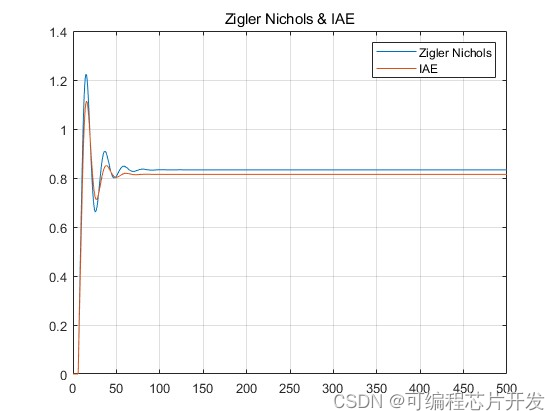
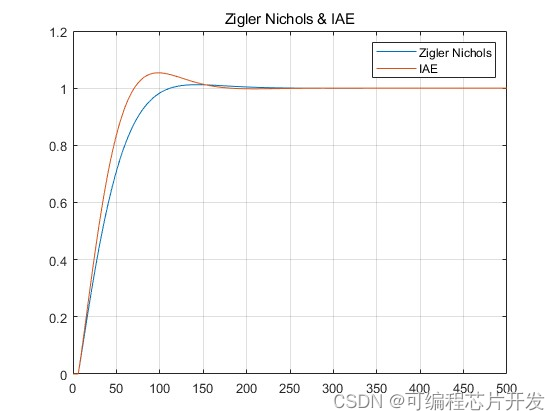
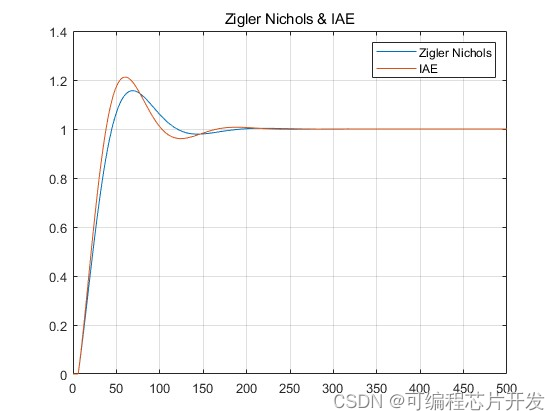
分别通过Ziegler-Nichols和IAE算法,对PID控制器参数kp,ki,kd进行参数整定,最后对比两种算法得到的PID控制器的性能。
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
................................................................
%初始时间间隔
Ts = 1;
% 时间常数
T0 = 5;
%最大加速度
at = 1;
%最大时间
fmax = 500;
%初始误差
errs = 0;
%时间常数
tao = 25;
%比例系数
kp = 1.747;
%分子
num = kp;
%分母
den = [tao 1];
%Zigler Nichols
%比例增益
Kp1 = (tao/(kp*T0));% 第1比例增益
Kp2 = ((0.9*tao)/(kp*T0))*0.1; % 第2比例增益
Kp3 = ((1.2*tao)/(kp*T0))*0.1;% 第3比例增益
%积分
Ki2 = 3.33*T0;
Ki3 = 2*T0;
%微分
Kd3 = 0.5*T0;
%调用Simulink模型
sim('Model2.slx');
%画图
r = Tout.signals(1).values;% 参考输入
p1 = Tout.signals(3).values;% p值
pi1 = Tout.signals(4).values;% pi值
pid1 = Tout.signals(5).values;% pid值
figure;
plot(tout,r,'LineWidth',2);
hold on
plot(tout,p1);
hold on
plot(tout,pi1);
hold on
plot(tout,pid1);
hold on
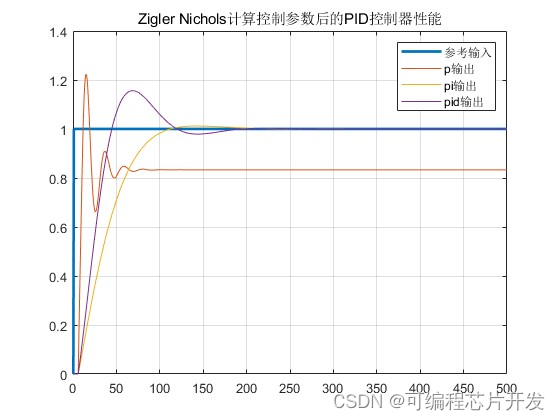
title('Zigler Nichols计算控制参数后的PID控制器性能')
legend('参考输入','p输出','pi输出','pid输出');
grid;
save R1.mat
00024.系统原理简介
在控制系统设计中,PID(比例-积分-微分)控制器是一种广泛使用的控制策略。PID控制器通过调整系统的偏差,以达到所需的输出。它由三个主要部分组成:比例(P)、积分(I)和微分(D)部分。
Ziegler-Nichols和IAE(积分绝对误差)是两种常用的PID参数整定方法。
4.1Ziegler-Nichols方法
Ziegler-Nichols方法是基于实验和观察的方法,它提供了如何选择PID控制器的参数的指导。该方法基于系统对阶跃输入的响应来计算参数。
a. 比例增益(kp):选择一个较小的初始比例增益,并观察系统的响应。如果系统的输出没有达到期望的输出,则增加kp的值。如果系统的输出超出了期望的输出,则减少kp的值。重复这个过程,直到找到使系统输出接近期望输出的kp值。
b. 积分增益(ki):一旦选择了kp,可以通过以下公式选择ki:ki = kp / (T1 * e),其中T1是时间常数(T1 = 0.5秒),e是期望的输出与实际输出之间的误差。
c. 微分增益(kd):选择ki后,可以通过以下公式选择kd:kd = (kp * Td) / T2,其中Td是微分时间常数(Td = 0.1秒),T2是积分时间常数(T2 = 0.5秒)。
Ziegler-Nichols方法的优点是它基于实验数据,因此可以直接应用于特定的系统。然而,它需要多次调整参数,并且可能不适用于所有类型的系统。
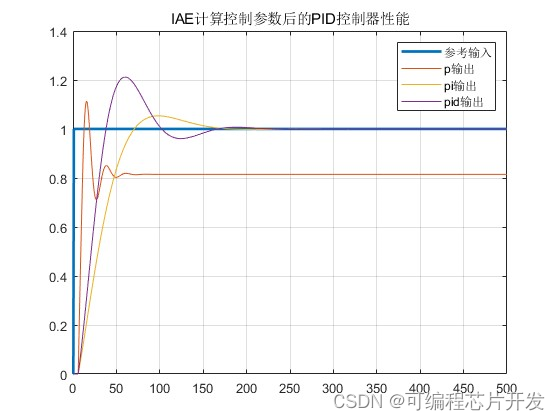
4.2 IAE(积分绝对误差)方法
IAE方法是基于一种特定的性能指标来选择PID控制器的参数。该方法的目标是使系统的输出跟踪期望的输出,同时使积分绝对误差的积分值最小化。
a. 比例增益(kp):首先选择一个较小的初始比例增益,并观察系统的响应。如果系统的输出没有达到期望的输出,则增加kp的值。如果系统的输出超出了期望的输出,则减少kp的值。重复这个过程,直到找到使系统输出接近期望输出的kp值。
b. 积分增益(ki):一旦选择了kp,可以通过以下公式选择ki:ki = kp * (t / (e - L)),其中t是时间常数(t = 0.5秒),e是期望的输出与实际输出之间的误差,L是积分下限(L = 0)。这个公式是基于IAE方法的理论推导得出的。
c. 微分增益(kd):选择ki后,可以通过以下公式选择kd:kd = kp * (t / (e - L)) * sqrt(e),其中sqrt(e)是e的平方根。这个公式也是基于IAE方法的理论推导得出的。
IAE方法的优点是它有一个明确的目标函数,因此可以更容易地应用于不同类型的系统。此外,它只需要调整少量的参数,因此可以更快地找到合适的参数值。然而,它可能需要更复杂的数学计算,因此可能需要更多的计算资源。
5.完整工程文件
v
v


















 914
914

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











