







四旋翼飞行器控制模型
为便于建立模型,现对四旋翼飞行器进行以下假设:
1、四旋翼飞行器是均匀对称的刚体
2、四旋翼飞行器的质量和转动惯量不发生改变
3、四旋翼飞行器的几何中心与其重心重合
4、四旋翼飞行器只受重力和螺旋桨拉力
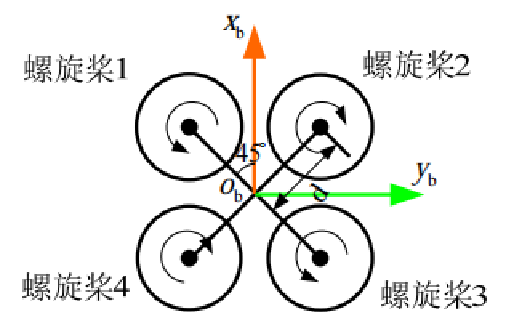
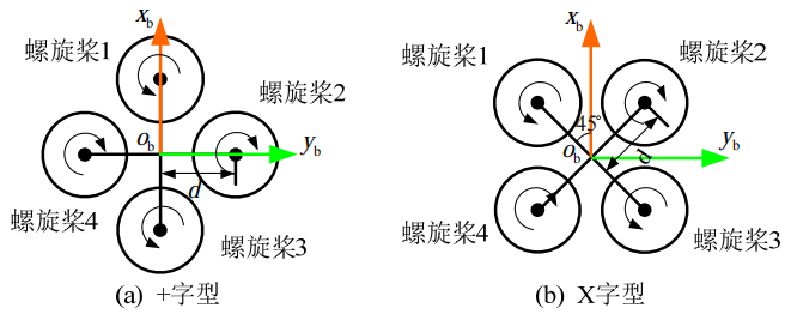
5、螺旋桨1、3为逆时针转动,螺旋桨2、4为顺时针转动
 多旋翼建模流程图
多旋翼建模流程图
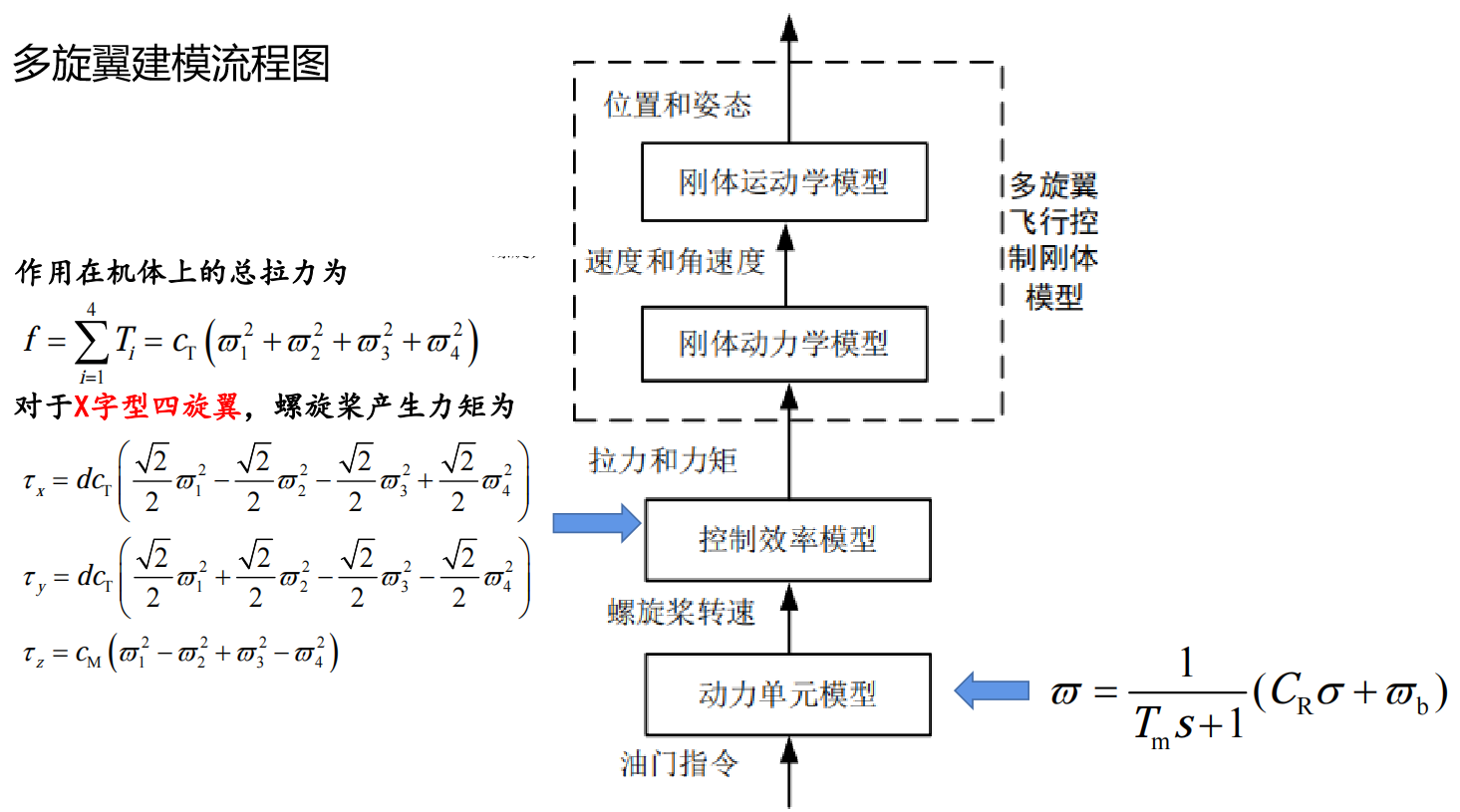
一、动力单元模型
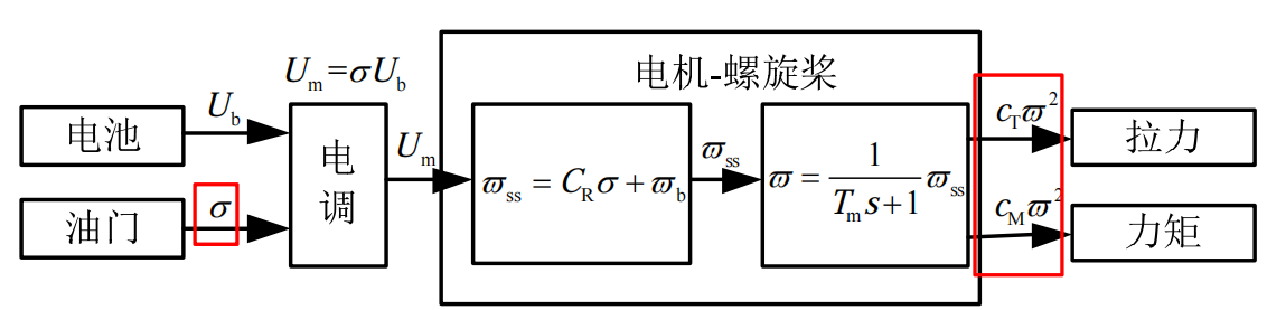


二、控制效率模型

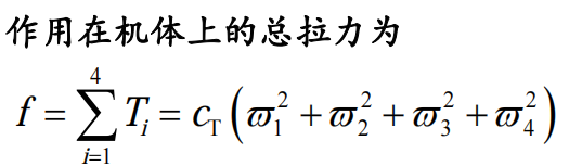
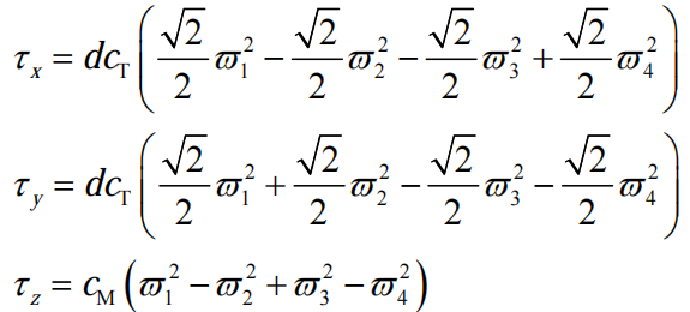
CT是螺旋桨拉力系数,CM是螺旋桨转矩系数。
三、刚体模型
预备知识:
一、旋转矩阵
1、旋转矩阵改变向量表达形式的目的在于:
在地球坐标系下表示四旋翼飞行器的位置和速度,有助于飞控手更好地确定飞行器的位置和飞行速度;
在机体坐标系下表示四旋翼飞行器的拉力和力矩比较直观,且传感器的测量也是在机体坐标系下表示的。
2.推导
如图两个坐标系A、B,坐标系B相对于参考坐标系A沿X轴旋转了θ角度,坐标系B的三个单位矢量为Xb,Yb,Zb(B可看作机体坐标系,A可看作地球坐标
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 3278
3278











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









