






在理解关节机器人运动学原理的基础上用MATLAB开始做机器人的运动学仿真1.关节参数
要在MATLAB建立机器人对象,首先要了解D-H参数,利用工具箱的LINK和ROBOT函数建立对象。
LINK函数 CONVENTION: 选取standard和modified,其中standard代表标准D-H参数,modified代表改进D-H参数
CONVENTION: 选取standard和modified,其中standard代表标准D-H参数,modified代表改进D-H参数
alpha: 扭转角
A: 连杆长度
theta: 关节角
D: 横距
sigma: 关节类型(选取0或者非0值)
LINK的数据结构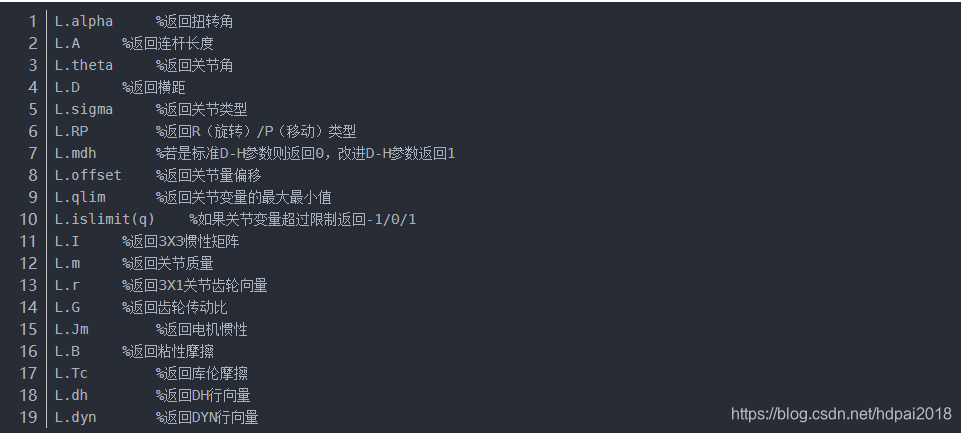 robot函数:
robot函数: 2.坐标变换
2.坐标变换
利用工具箱中的transl,rotx,roty,rotz可以实现用齐次变换表示平移和旋转变换。
transl表示对坐标的平移变换
rotx,roty,rotz表示对坐标的旋转变换
3.轨迹规划
利用Robotics提供的ctraj,jtraj和trinterp函数实现笛卡尔规划、关节空间规划和变换插值
ctraj函数调用
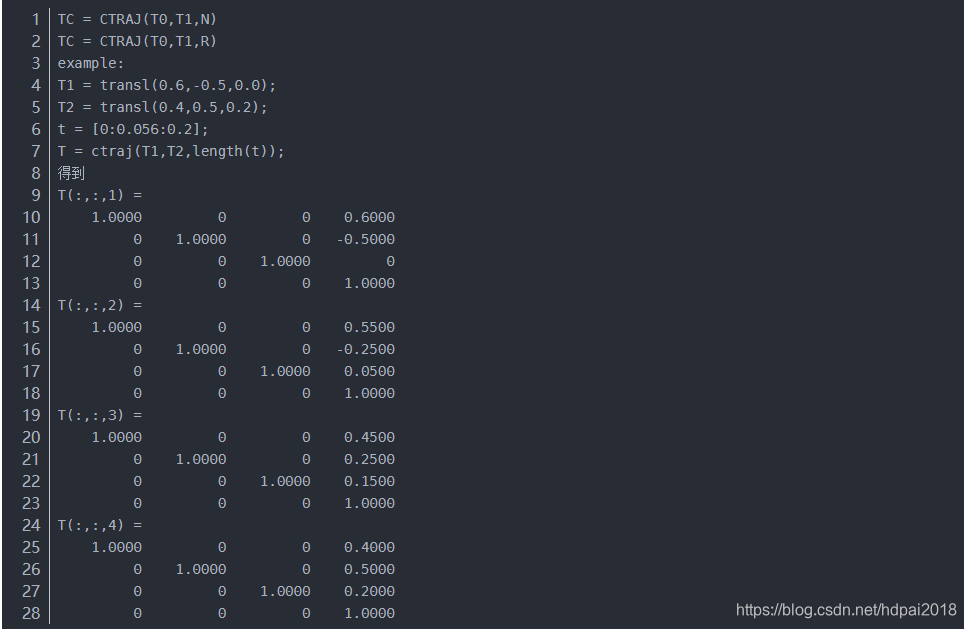 T是T1到T2的笛卡尔轨迹规划,N是点的数量,R是给定路径向量R的每个值必须在0到1之间
T是T1到T2的笛卡尔轨迹规划,N是点的数量,R是给定路径向量R的每个值必须在0到1之间
jtraj函数调用
1.[Q QD QDD] = JTRAJ(Q0,Q1,N,QD0,QD1)
2.[Q QD QDD] = JTRAJ(Q0,Q1,T)
3.[Q QD QDD] = JTRAJ(Q0,Q1,T,QD0,QD1)
%参数Q为状态Q0到Q1的关节空间规划轨迹,N为规划的点数,T为给定时间向量的长度,速度非零边界可以用QD0和QD1来指定,QD和QDD为返回的规划轨迹的速度和加速度
trinterp函数调用
TR = TRINTERP(T0,T1,R) %参数TR是在T0和T1直线的坐标变化插值,R需要在[0,1]之间

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









