






 超级会员免费看
超级会员免费看
目录
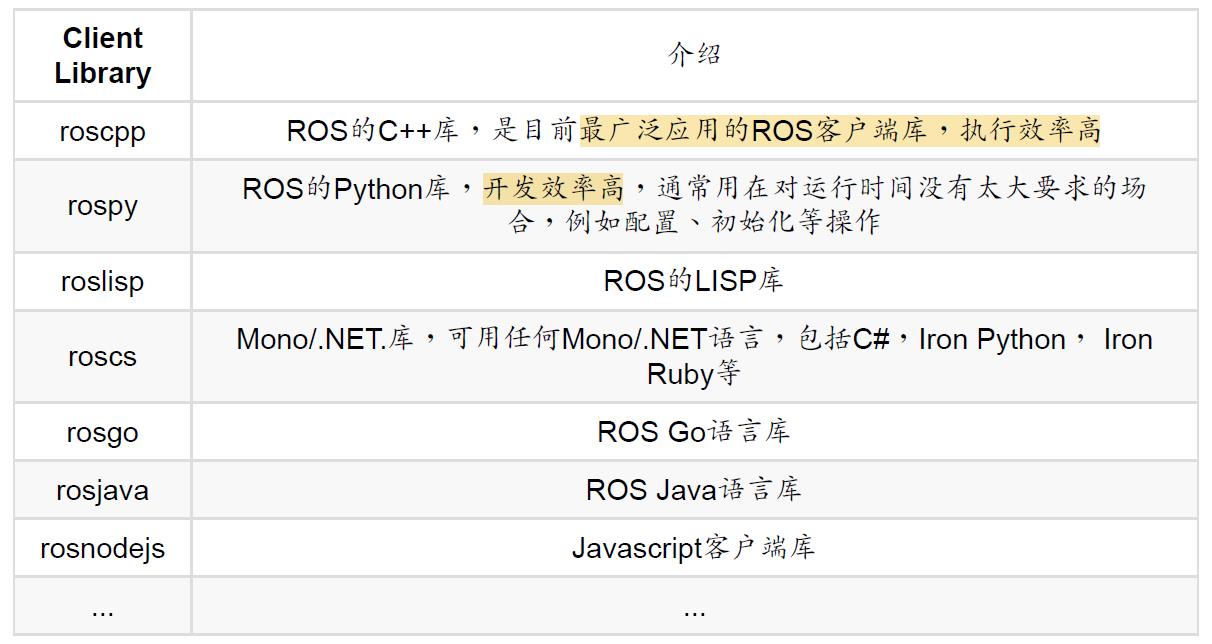
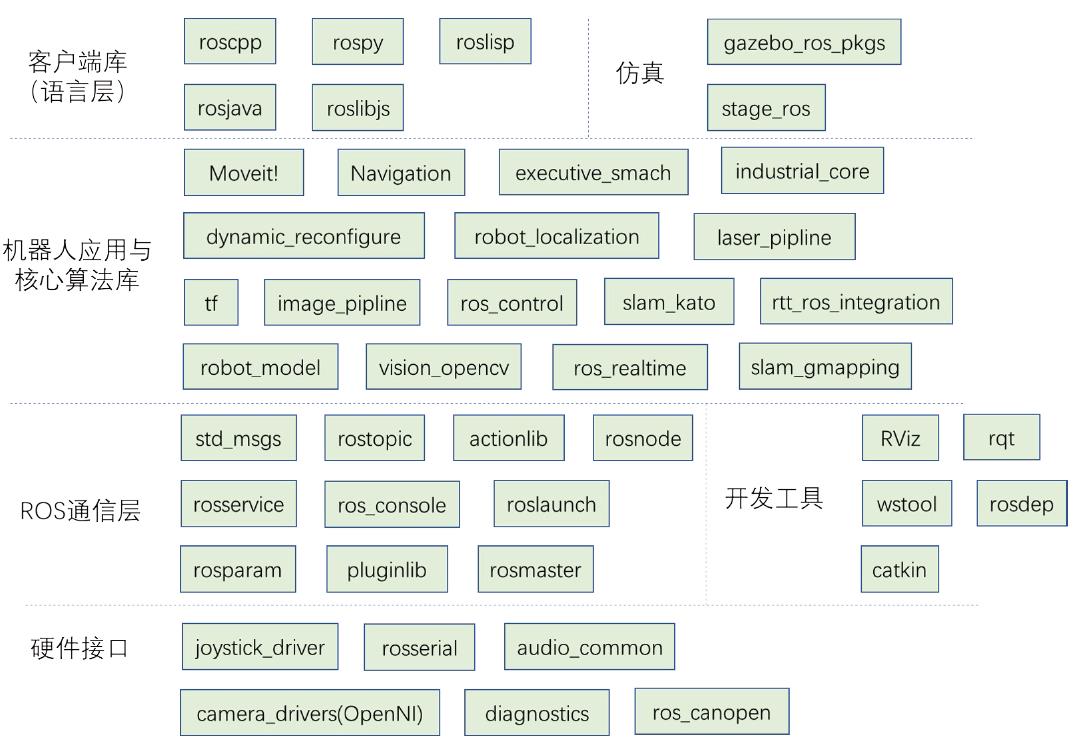
一、ROS支持的客户端库和整体的包结构分布
二、roscpp:
位于/opt/ros/kinetic
// #include<ros/ros.h>
1. 主要部分
(1)ros::init():解析传入的ROS参数,创建node第一步需要用到的函数 //可以为node命名

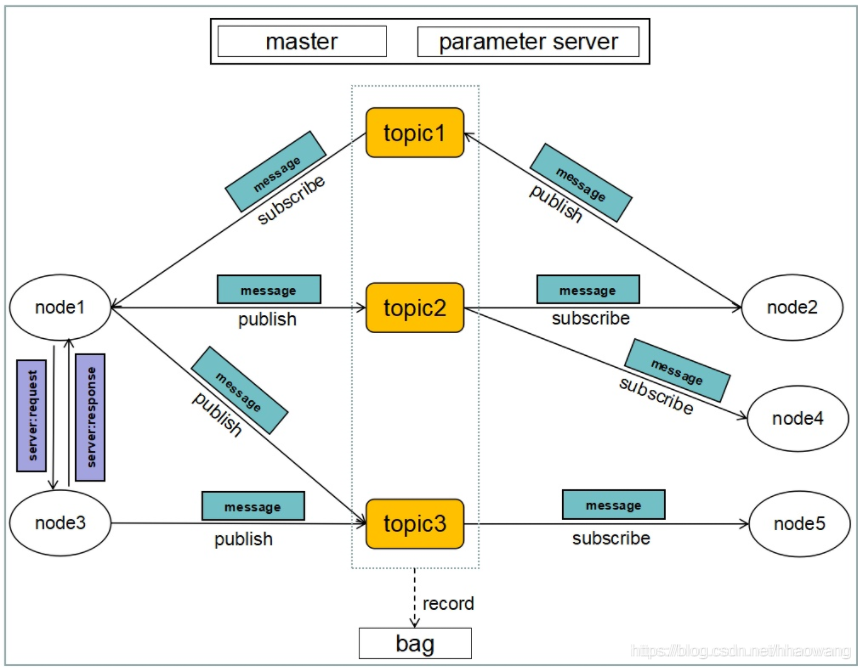
 本文详细介绍了ROS的客户端库roscpp,包括节点的初始化与关闭、NodeHandle的使用,以及topic、service通信,参数服务器设置,时钟管理和日志异常处理等内容。重点讲解了roscpp中如何进行topic通信和service通信,以及自定义消息类型和回调函数的使用。
本文详细介绍了ROS的客户端库roscpp,包括节点的初始化与关闭、NodeHandle的使用,以及topic、service通信,参数服务器设置,时钟管理和日志异常处理等内容。重点讲解了roscpp中如何进行topic通信和service通信,以及自定义消息类型和回调函数的使用。
目录
位于/opt/ros/kinetic
// #include<ros/ros.h>
(1)ros::init():解析传入的ROS参数,创建node第一步需要用到的函数 //可以为node命名
 1372
1372

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























