







目录
1.算法仿真效果
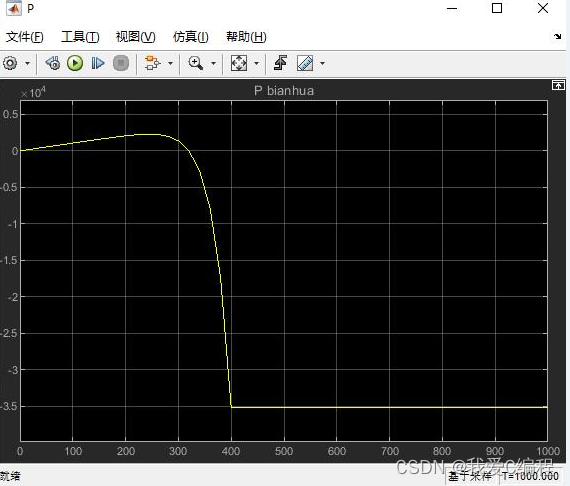
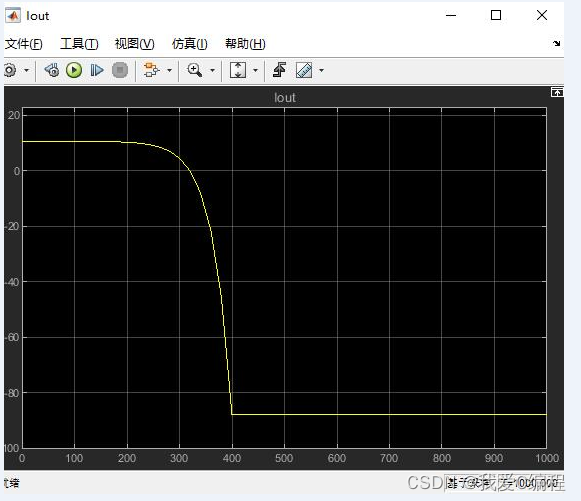
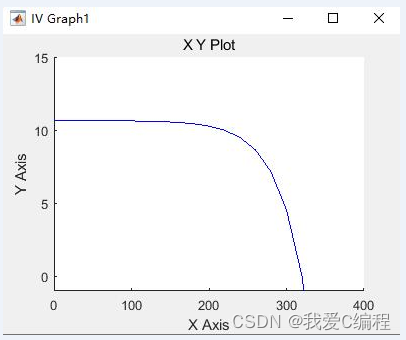
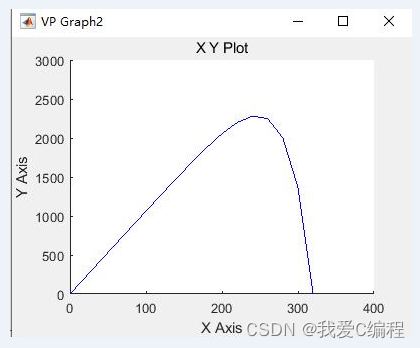
matlab2022a仿真结果如下:
2.MATLAB核心程序
function [sys,x0,str,ts] = MPPTsfun(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
%case 1,
%sys=mdlDerivatives(t,x,u);
%case 2,
%sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
%case 4,
%sys=mdlGetTimeOfNextVarHit(t,x,u);
case {1,2,4,9} %unused flag value
sys=[];
%sys=mdlTerminate(t,x,u);
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 2;
sizes.NumInputs = 7;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
.........................................................................
function sys=mdlOutputs(t,x,u)
%I=u(4)*(1-u(6)*(exp((u(7)-u(2))/(u(5)*u(1)))-1))+u(3);
k1=0.001; % voltage search step size
u1=0;
% u1=u(7); %init voltage
p1=u1*(u(4)*(1-u(6)*(exp((u1-u(2))/(u(5)*u(1)))-1))+u(3));
u2=u1+k1;
p2=u2*(u(4)*(1-u(6)*(exp((u2-u(2))/(u(5)*u(1)))-1))+u(3));
k2=(p2-p1)/(u2-u1);
U=(u1+u2)/2 ;
k=abs(k2);
while k>0.001 % xie liu "k<=0.1,(5.7 du)" shi, stop search
% if "k" selected too small ,it will take a lot of time to search
if k2>0
u1=u1+k1;
p1=u1*(u(4)*(1-u(6)*(exp((u1-u(2))/(u(5)*u(1)))-1))+u(3));
u2=u1+k1;
p2=u2*(u(4)*(1-u(6)*(exp((u2-u(2))/(u(5)*u(1)))-1))+u(3));
k2=(p2-p1)/(u2-u1);
U=(u1+u2)/2;
k=abs(k2);
else
u1=u1-k1;
p1=u1*(u(4)*(1-u(6)*(exp((u1-u(2))/(u(5)*u(1)))-1))+u(3));
u2=u1-k1;
p2=u2*(u(4)*(1-u(6)*(exp((u2-u(2))/(u(5)*u(1)))-1))+u(3));
k2=(p2-p1)/(u2-u1);
U=(u1+u2)/2;
k=abs(k2);
end
end
if U>=320 % Voc=44.2V
sys=[0;320]; % Imax=0;Umax=44.2;
else
sys=[U;u(4)*(1-u(6)*(exp((u2-u(2))/(u(5)*u(1)))-1))+u(3)];
end
A3723.算法涉及理论知识概要
MPPT控制器的全称是“最大功率点跟踪”(Maximum Power Point Tracking)太阳能控制器,是传统太阳能充放电控制器的升级换代产品。MPPT控制器能够实时侦测太阳能板的发电电压,并追踪最高电压电流值(VI),使系统以最大功率输出对蓄电池充电。应用于太阳能光伏系统中,协调太阳能电池板、蓄电池、负载的工作,是光伏系统的大脑。
最大功率点跟踪系统是一种通过调节电气模块的工作状态,使光伏板能够输出更多电能的电气系统能够将太阳能电池板发出的直流电有效地贮存在蓄电池中,可有效地解决常规电网不能覆盖的偏远地区及旅游地区的生活和工业用电,不产生环境污染。
目前,光伏阵列的最大功率点跟踪(MPPT)技术,国内外已有了一定的研究,发展出各种控制方法常,常用的有一下几种:恒电压跟踪法(ConstantVoltageTracking简称CVT)、干扰观察法(PerturbationAndObservationmethod简称P&O)、增量电导法(IncrementalConductancemethod简称INC)、基于梯度变步长的电导增量法等等。(这些算法只能用在无遮挡的条件下)
1)单峰值功率输出的MPPT的算法
目前,在无遮挡条件下,光伏阵列的最大功率点跟踪(MPPT)的控制方法常用的有以下几种:
l恒电压跟踪法(ConstantVoltageTracking简称CVT)
l干扰观察法(PerturbationAndObservationmethod简称P&O)
l增量电导法(IncrementalConductancemethod简称INC)
l基于梯度变步长的电导增量法,等等。
2)多峰值功率输出MPPT算法
普通的最大功率跟踪算法,如扰动观测发和电导增量法在一片云彩的遮挡下就有可能失效,不能实现真正意义的最大功率跟踪。
————————————————
S-函数是系统函数(System Function)的简称,是指采用非图形化的方式(即计算机语言,区别于Simulink的系统模块)描述的一个功能块。用户可以采用MATLAB代码,C,C++,FORTRAN等语言编写S-函数。S-函数由一种特定的语法构成,用来描述并实现连续系统、离散系统以及复合系统等动态系统;S-函数能够接受来自Simulink求解器的相关信息,并对求解器发出的命令作出适当的响应,这种交互作用非常类似于Simulink系统模块与求解器的交互作用。一个结构体系完整的S-函数包含了描述动态系统所需的全部能力,所有其他的使用情况都是这个结构体系的特例。往往S-函数模块是整个Simulink动态系统的核心。
S-函数作为与其他语言相结合的接口,可以使用这个语言所提供的强大能力。例如,Matlab语言编写的S-函数可以充分利用MATLAB所提供的丰富资源,方便地调用各种工具箱函数和图形函数;使用C语言编写的S-函数可以实现对操作系统的访问,如实现与其他进程的通信和同步等。
用户可以从如下的几个角度来理解S-函数:
(1) S-函数为Simulink的“系统”函数。
(2)能够响应Simulink为求解器命令的函数。
(3)采用非图形化的方法实现一个动态系统。
(4)可以开发新的Simulink模块。
(5)可以与已有的代码相结合进行仿真。
(6)采用文本方式输入复杂的系统方程。
(7)扩展Simulink功能。M文件S-函数可以扩展图形能力,C MEX S-函数可以提供与操作系统的接口。
(8)S-函数的语法结构是为实现一个动态系统而设计的(默认用法),其他S-函数的用法是默认用法的特例(如用于显示目的)。
4.完整MATLAB
V


















 100
100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











