







感谢:紫薯萝卜 https://zhuanlan.zhihu.com/p/77996744
1. 同步误差  定义
定义
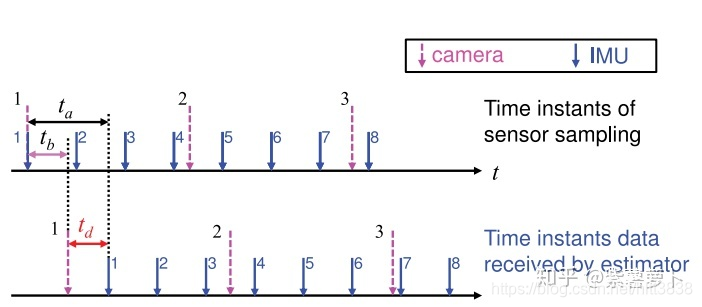
不同传感器之间的数据同步对融合算法至关重要,在VIO中,相机与IMU之间的数据同步对VIO精度影响非常大。如下图所示,假设相机和IMU在同一时刻(设为![]() )采样,由于曝光、数据传输等需要时间,相机数据在经过
)采样,由于曝光、数据传输等需要时间,相机数据在经过 ![]() 时间后才收到,IMU数据在经过
时间后才收到,IMU数据在经过 ![]() 时间后收到,一般在收到传感器数据后才会打时间戳,所以相机和IMU数据的时间戳分别为
时间后收到,一般在收到传感器数据后才会打时间戳,所以相机和IMU数据的时间戳分别为 ![]() ,由于
,由于 ![]() 与
与 ![]() 的不一致,使得本来在同一时刻采集的相机和IMU数据被打上了不同的时间戳,从而造成了数据不同步,定义同步误差(也叫Time Delay)
的不一致,使得本来在同一时刻采集的相机和IMU数据被打上了不同的时间戳,从而造成了数据不同步,定义同步误差(也叫Time Delay) ![]() ,由于我们只关心两者之间的相对时间,所以只需要在图像时间戳上加上
,由于我们只关心两者之间的相对时间,所以只需要在图像时间戳上加上![]() 来补偿掉图像与IMU之间的误差,IMU时间戳保持不变。
来补偿掉图像与IMU之间的误差,IMU时间戳保持不变。
2.  估计理论推导
估计理论推导
![]() 通常不是一个恒定的值,所以没法事先标定补偿,需要加入到状态向量中进行实时估计(Online Temporal Calibration)。加入
通常不是一个恒定的值,所以没法事先标定补偿,需要加入到状态向量中进行实时估计(Online Temporal Calibration)。加入 ![]() 后最主要的改动就是State Augmentation:当图像在
后最主要的改动就是State Augmentation:当图像在 ![]() 时刻采集,需要将
时刻采集,需要将 ![]() 时刻的相机状态加入到状态向量中,而原始MSCKF加入的是
时刻的相机状态加入到状态向量中,而原始MSCKF加入的是 ![]() 时刻相机状态。先IMU预测到
时刻相机状态。先IMU预测到 ![]() 时刻(而不是原来的
时刻(而不是原来的 ![]() 时刻),再根据外参计算
时刻),再根据外参计算 ![]() 时刻相机位姿并扩展到状态向量:
时刻相机位姿并扩展到状态向量:

最后扩展协方差矩阵:

![]() 是
是 ![]() 对状态向量的Jacobian,这里只推导
对状态向量的Jacobian,这里只推导![]() 对
对![]() 的Jacobian
的Jacobian ![]() ,其他项在之前的章节已经推导过了。(注意:推导的Jacobian和论文[1]中的不一致,这是因为[1]对旋转误差量使用的右乘,而这里统一使用的左乘)
,其他项在之前的章节已经推导过了。(注意:推导的Jacobian和论文[1]中的不一致,这是因为[1]对旋转误差量使用的右乘,而这里统一使用的左乘)

推导过程如下:
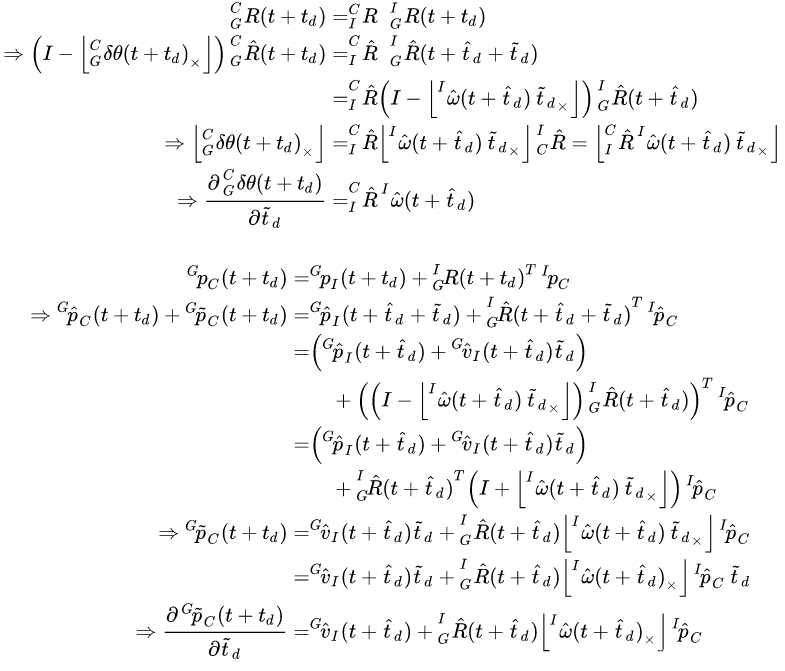
上述推导最关键的那一步替换是旋转![]() 和
和![]() 与
与 ![]() 之间的关系(旋转对时间的导数是角速度)即:
之间的关系(旋转对时间的导数是角速度)即:

注意这里是坐标变换,只能用左乘。
3.  估计实测
估计实测
总结下来,引入 ![]() 估计后算法的改动如下:
估计后算法的改动如下:
- 状态向量中添加1维状态
 ,初值可以直接设为0,根据对实际系统的同步误差的大致估计,设一个初始协方差。
,初值可以直接设为0,根据对实际系统的同步误差的大致估计,设一个初始协方差。 - 补偿图像时间戳:每次接收到图像信息后,从估计器获取当前的
 估计,将其加到图像时间戳上。这样后面IMU Propagation会自动积分到最新的图像时间戳
估计,将其加到图像时间戳上。这样后面IMU Propagation会自动积分到最新的图像时间戳 ,State Augmentation会自动扩增
,State Augmentation会自动扩增  时刻的相机状态,这两部分都不需要再做任何改动。
时刻的相机状态,这两部分都不需要再做任何改动。 - 设置
 :State Augmentation的Jacobian中填写新相机对
:State Augmentation的Jacobian中填写新相机对  的Jacobian 。
的Jacobian 。
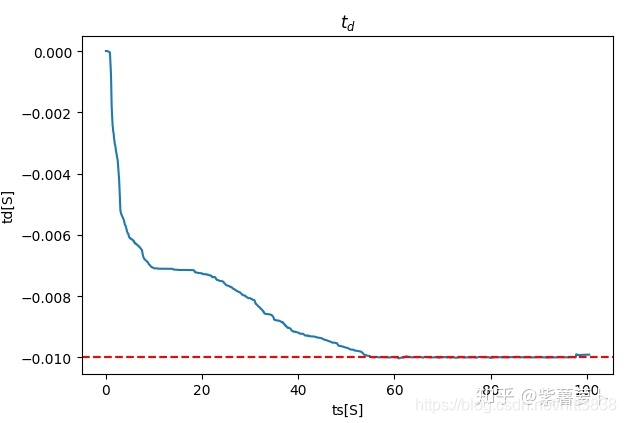
![]() 估计看上去很复杂,其实代码改动量非常少。在EuROC上测试效果,EuROC的数据同步误差比较小,为了凸显改进效果,先人工将图像时间戳加10ms,可以看到 能随着运动渐渐收敛到-10ms。
估计看上去很复杂,其实代码改动量非常少。在EuROC上测试效果,EuROC的数据同步误差比较小,为了凸显改进效果,先人工将图像时间戳加10ms,可以看到 能随着运动渐渐收敛到-10ms。
![]()
参考文献
[1] Li M, Mourikis A I. Online temporal calibration for camera-IMU systems[M]. Sage Publications, Inc. 2014

















 1490
1490

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









