






部分px4飞控参数信息在下载log中使用Flight Review难以看到全部曲线,可以使用plot juggler软件来查看:
0、安装与开启
安装:
sudo apt install ros-noetic-plotjuggler
sudo apt install ros-noetic-plotjuggler-ros
启动:
rosrun plotjuggler plotjuggler
在左上角[file]-[data]
左侧参数中选择相应信息,拖动到右侧窗口
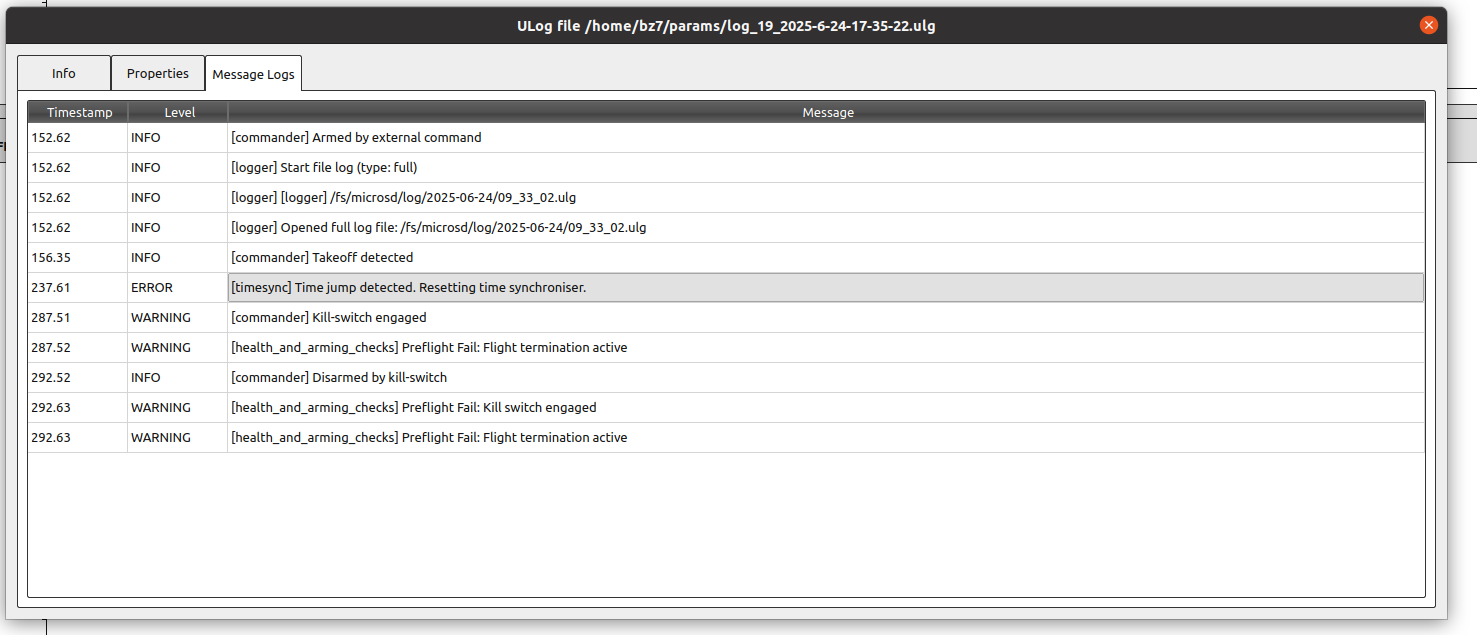
刚刚导入时会弹出基础信息窗口,包含【info】,【properties】,【message logs】:
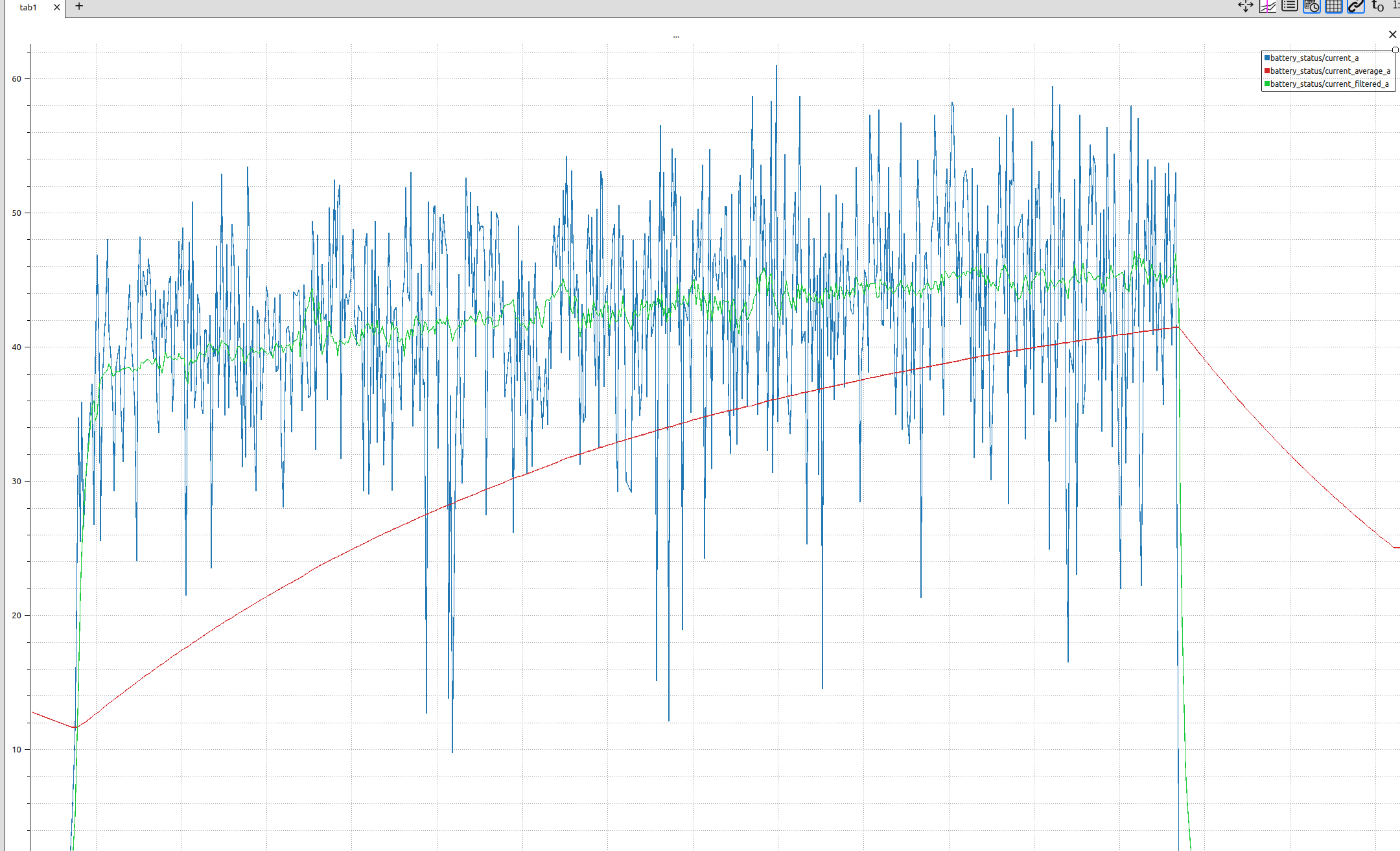
1、电流、电压相关
电流位于 【battery_status】中,有瞬时电流【current_a】,平均电流【current_average_a】,滤波电流【current_filered_a】3个曲线可以查看:
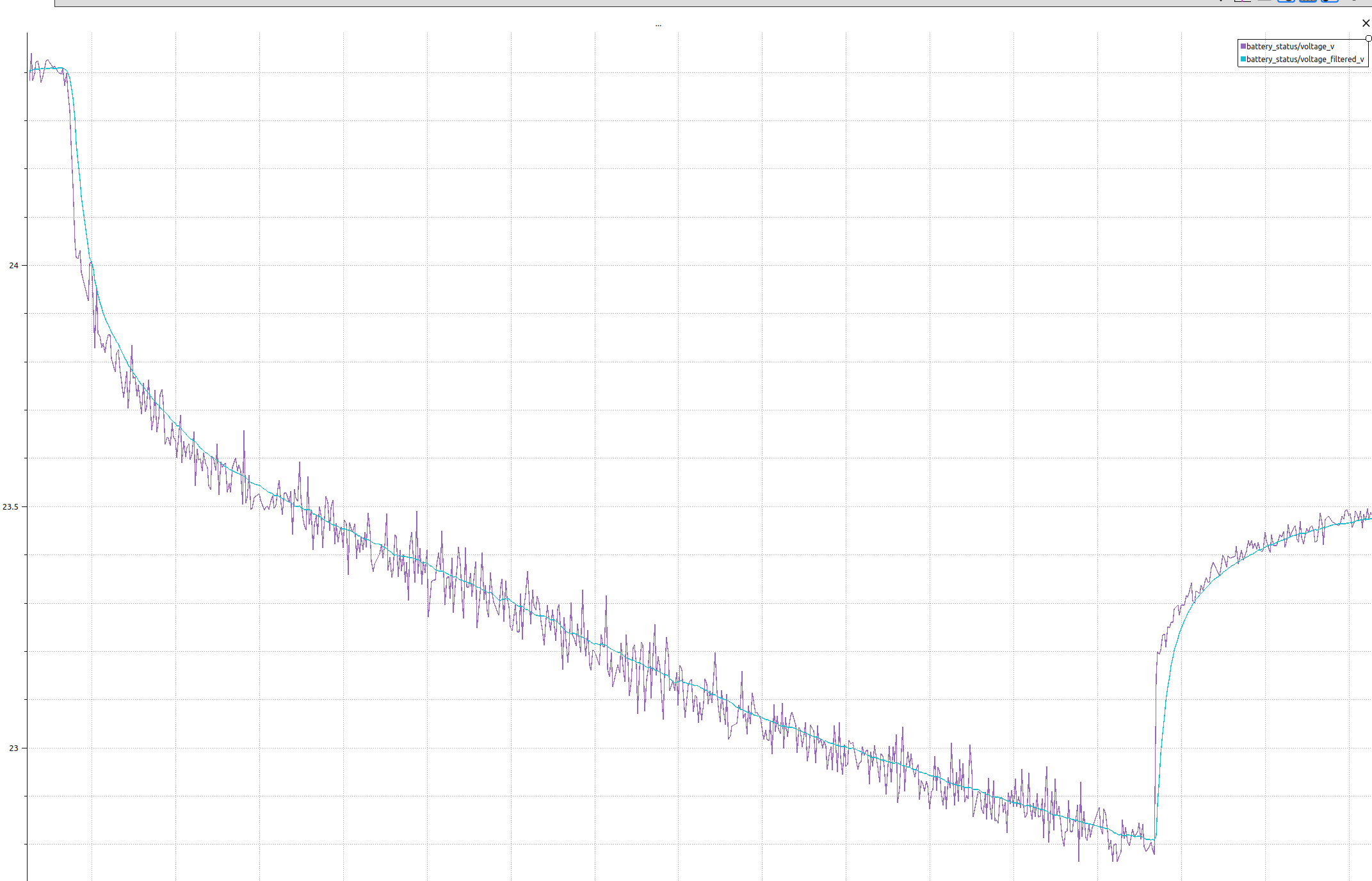
电压位于【battery_status】中,有【voltage_v】和【voltage_filered_v】
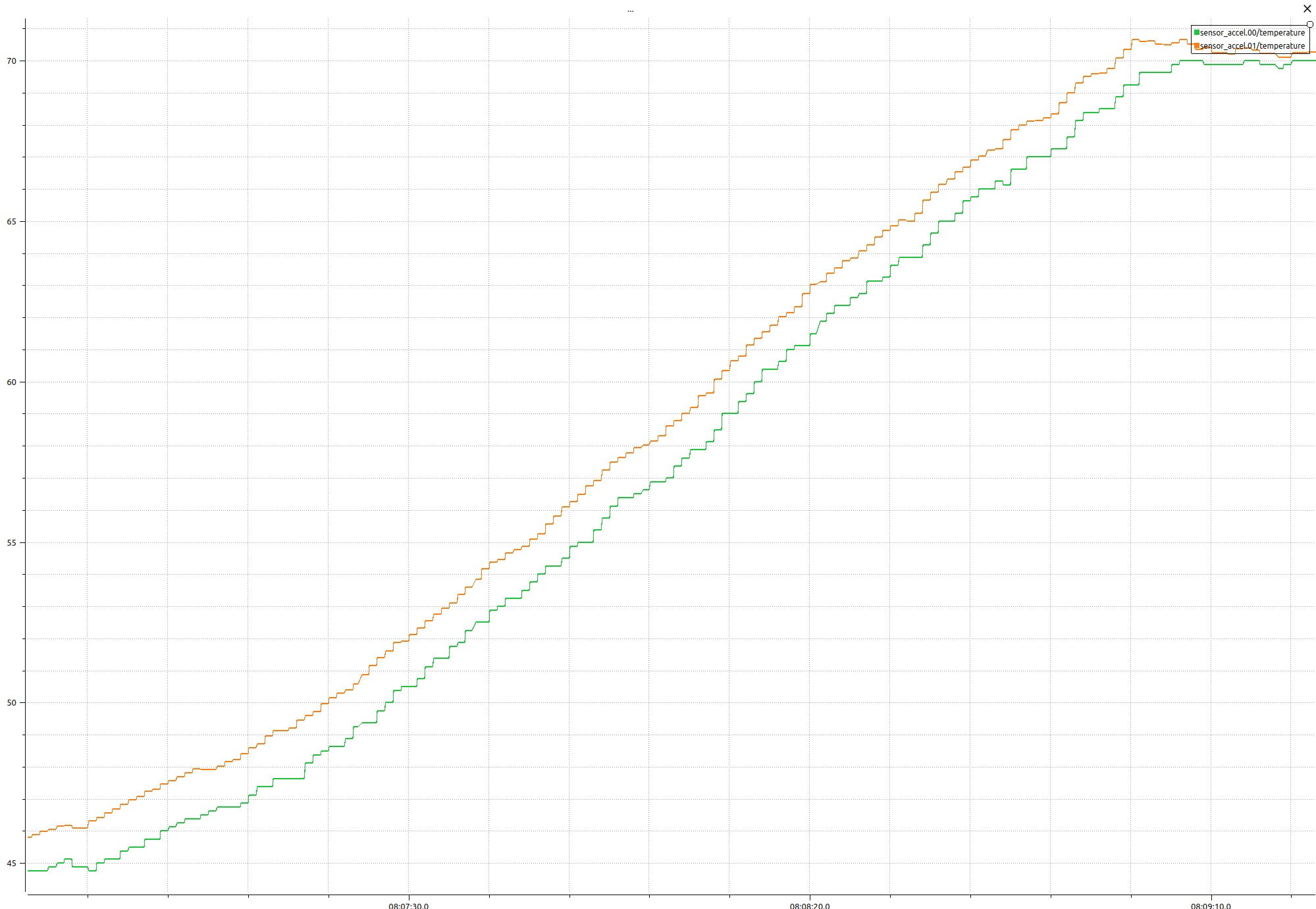
2、温度相关
传感器温度,flight review中也可以显示,在plotjuggler中显示在每个传感器中:
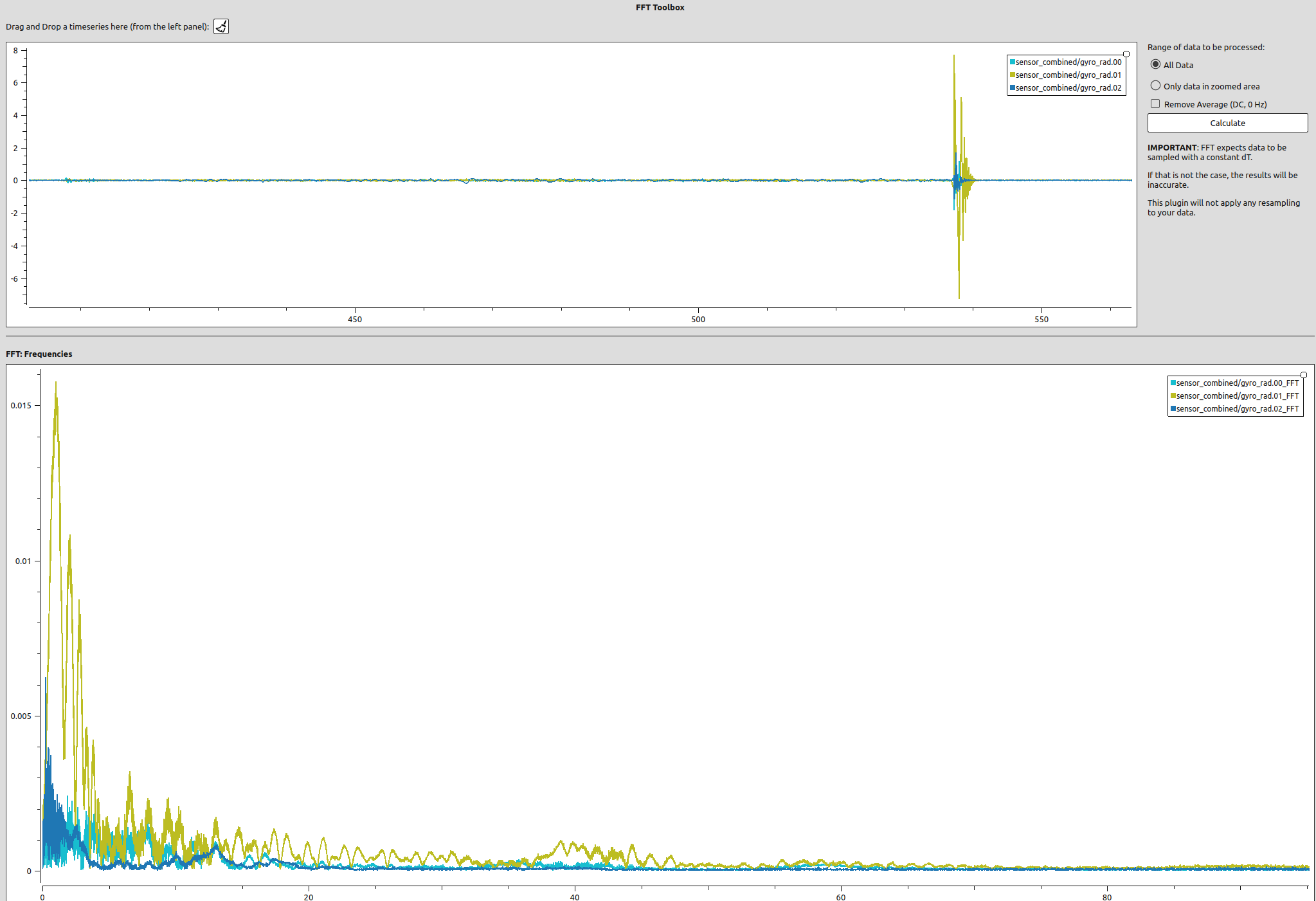
3、滤波工具
【菜单】-【tools】-【fast-fourier-transform】(快速傅里叶变换)
选择参数,例如【sensor-conbined】,拖动到上方框,再点击calculate

















 5810
5810

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









