






这里用的到是自定义的msg+cpp发布消息
主要包括两个msg,一个订阅者和一个发布者,以及cmakelists的相应修改。
首先是自定义的msg,功能包里面来自定义msg也是可以的:
新建功能包
catkin_create_pkg pkg roscpp std_msgs message_generation message_runtime
这里路劲没选对,是在src里面创建功能包。
其次就是新建一个msg文件夹,然后把一下msg添加进去:
##GlobalPathPlanningInterface.msg
float64 timestamp #时间戳
float32[] startpoint #起点位置
float32[] endpoint #终点位置
string[] routedata #路径集合(所有途径点的集合)
float32 process_time # 进程处理时间
int32 Global_Path_Segment_Index # 从1开始累加
int32 len_path # 全局路径的长度
#int8 Global_Path_End_Flag #终点置1,其他0
float32[] last_point
int8 plan_over #0-等待规划完成 1-本次规划结束
##GpsImuAddInterface.msg
std_msgs/Header header # ros时间戳
int64 gps_time # 时间戳
float64 AngRateRawX # 角速度x
float64 AngRateRawY # 角速度y
float64 AngRateRawZ # 角速度z
float64 AccelRawX # x轴加速度
float64 AccelRawY # y轴加速度
float64 AccelRawZ # z轴加速度
float64 PosESigma #东向位置标准差
float64 PosNSigma #北向位置标准差
float64 PosUSigma #天向位置标准差
float64 VelESigma # 东向速度标准差
float64 VelNSigma # 北向速度标准差
float64 VelUSigma # 天向速度标准差
float64 VelSigma # 车辆速度标准差
float64 AccelX # 车辆坐标系x轴加速度
float64 AccelY # 车辆坐标系y轴加速度
float64 AccelZ # 车辆坐标系z轴加速度
float64 AngleHeadingSigma # 偏航角标准差
float64 AnglePitchSigma # 俯仰角标准差
float64 AngleRollSigma # 横滚角标准差
float64 AngRateX # 车辆坐标系x轴角速度
float64 AngRateY # 车辆坐标系y轴角速度
float64 AngRateZ # 车辆坐标系z轴角速度
int32 GpsNumSats2Used #辅天线使用卫星数
int32 GpsNumSats #主天线搜星数
int32 GpsNumSats2 #副天线搜星数
float64 Rear_posX #后轴中心点UTM坐标x
float64 Rear_posY #后轴中心点UTM坐标y
float64 Rear_posZ #后轴中心点UTM坐标z
float32 process_time # 进程处理时间
然后在CMakeLists.txt里面先把自定义的msg搞定:
##大部分都可以直接使用。
find_package(catkin REQUIRED COMPONENTS
message_generation
message_runtime
roscpp
std_msgs
sensor_msgs
)
add_message_files(
FILES
GlobalPathPlanningInterface.msg
GpsImuInterface.msg
)
generate_messages(
DEPENDENCIES
std_msgs
sensor_msgs
)
catkin_package(
CATKIN_DEPENDS message_generation message_runtime roscpp std_msgs
)
package.xml:
主要是添加message_runtime和message_generation的依赖内容
<build_depend>message_generation</build_depend>
<build_depend>message_runtime</build_depend>
<exec_depend>message_runtime</exec_depend>
<exec_depend>message_generation</exec_depend>
然后再是主程序:
//publisher.cpp
#include<iostream>
#include<ros/ros.h>
#include<pkg/GlobalPathPlanningInterface.h>
#include<pkg/GpsImuInterface.h>
using namespace std;
int main(int argc, char *argv[])
{
ros::init(argc, argv, "pub");//初始化节点
ros::NodeHandle nh;//初始化句柄nh
ros::Publisher pub = nh.advertise<pkg::GlobalPathPlanningInterface>("global", 10);//话题名
ros::Rate loop_rate(10);//设置发送频率
while ( ros::ok())
{
ROS_INFO("success");
pkg::GlobalPathPlanningInterface msg;
msg.timestamp = 100;
pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
然后是订阅者:
//subscriber.cpp
#include<iostream>
#include<ros/ros.h>
#include<pkg/GlobalPathPlanningInterface.h>
#include<pkg/GpsImuInterface.h>
using namespace std;
void call_back(const pkg::GlobalPathPlanningInterface)
{
ROS_INFO("sub success");
}
int main(int argc, char *argv[])
{
ros::init(argc, argv, "sub");//初始化节点
ros::NodeHandle nh;//初始化句柄nh
ros::Publisher pub = nh.advertise<pkg::GpsImuInterface>("global2", 10);//话题名
ros::Subscriber sub = nh.subscribe<pkg::GlobalPathPlanningInterface>("global", 10, call_back);
ros::Rate loop_rate(10);//设置发送频率
while ( ros::ok())
{
ROS_INFO("success");
pkg::GpsImuInterface msg;
msg.gps_time = 1000;
pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
接下来再修改一个CMakeLists.txt:
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
有几个cpp就添加几个这个,向这里就这样添加:
add_executable(publisher src/publisher.cpp)
target_link_libraries(publisher ${catkin_LIBRARIES})
add_executable(subscriber src/subscriber.cpp)
target_link_libraries(subscriber ${catkin_LIBRARIES})
结束,编译就好了。
测试:
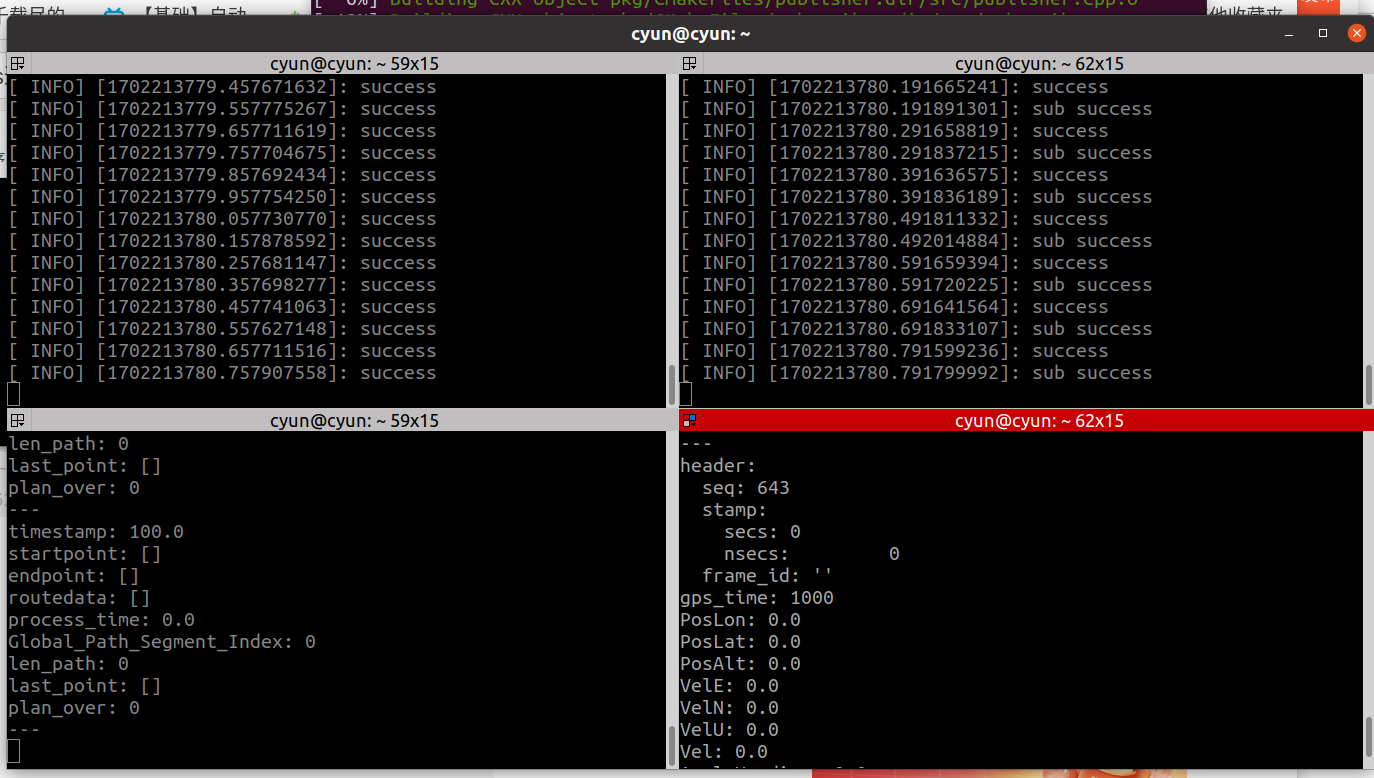
通信和数据都是没有问题的。
以上过程其实并没有什么难点,问题在于熟悉就行、
















 1194
1194











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











