








原文:https://syrotek.ciirc.cvut.cz/course/ROS_CPP_INTRO
当我看到这一个教程的时候很兴奋,因为这里面的东西很实在,干货比较多。这个系列的教程有基于stage的仿真,有实物对照还是不错的。所有的翻译不一定完全遵照原文,掺杂有翻译者的个人经验和理解
##主要内容:
###1. ROS的入门介绍
###2. 基于激光雷达的避障
###3. 沿墙运动
###4. PID控制器
###5. 里程计的矫正
###6. 固定路径跟随
#1、ROS 入门介绍
###ROS (Robot Operating System)
ROS是一个编写机器人软件很灵活的框架,它包含了工具集、库和协议(conventions),这些包通过交叉不同的机器人平台,可以简化机器人的开发。
ROS支持多中操作系统,但是官方支持的是ubuntu,每一个版本ubuntu对应一个ROS版本,ROS indigo 版本对应的是ubuntu 14.04,kinetic对应ubuntu 16.04,本教程采用的是ros kinetic版本。
在ros下运行的可以理解为图节点,通过ROS的通信框架这些线程被松散耦合到一起。编写ROS时候采用ROS的客户端库,ROS允许用不同程序编写的节点进行通讯。节点既可以通过topic进行subscribe/publish,也可以服务(service)的方式进行通讯。ROS只有一个MASTER节点,它提供的是名称检索服务,帮助节点之间建立通讯。roscore的启动命令:
roscore
节点启动命令;
rosrun <package_name> <executable_name> <parameters>
如果有多个节点要启动可以编写launch文件,通过roslaunch命令启动。
###创建包(packages)
编写ROS程序时候需要首先创建一个package1,首先跳转到路径catkin_ws/src下面。执行下面的指令,
catkin_create_pkg <package_name> [dep1] ... [depN]
将package_name替换为自己的package名字,dep1 。。。 depN为依赖包,本教程中常用依赖项为:roscpp、std_msgs。编写C++时候依赖包要包含roscpp,python程序需要rospy,用其他语言编写ROS程序不推荐,因为支持的不是特别好。
添加依赖roscpp后,生成的包里面会在目录下面生成两个新文件(package.xml, CMakeLists.txt)和两个新目录(src/, include/),你可以在package.xml填写这个package的相关信息(作者,版本,名字、描述、、、) 。头文件一般放在include目录下面,源文件放在src目录下面。
###准备 CMakeLists.txt
可以设置变量来包含所有必要的源文件:
set (SRCS1 ${SRCS1} src/file_1.cpp)
set (SRCS1 ${SRCS1} src/file_2.cpp)
包含catkin文件路径:
include_directories(include ${catkin_INCLUDE_DIRS})
创建可执行文件和catkin库:
add_executable(executable_name ${SRCS1}) ## executable_name 节点的名字
target_link_libraries(executable_name ${catkin_LIBRARIES})
###编译程序
跳转到catkin_ws目录下面,执行下面的指令:
catkin_make
###ROS and C++
如果是用C++编写的ROS程序,必须添加roscpp依赖,ros.h里面有常用的ros代码
#include "ros/ros.h"
ros程序正常运行必须得初始化
ros::init(argc, argv, "name_of_the_node");
初始化完成后需要一个Nodehandle进行ros的资源管理、通信
ros::NodeHandle n;
###Messages 和 topics
如上面提到的分立的节点之间是通过topic进行通讯的。每一个节点既可以publish 消息到topic上面,也可以通过subscribe的方式获得topic上的信息。ROS里面包含了很多种类的messages,也可以自己创建。基本的消息类型包含在std_msgs包里面。大多数的消息里面会包含:std_msgs::Header。你可以看到这个message的详尽内容如下操作:
rosmsg show Header
输出结果:
uint32 seq time stamp string frame_id
Header里面包含了三个变量,seq序列号,保证发送的多个消息可以正确的排列,stamp是epoch格式的时间戳。frame_id为坐标系名字,header的名字可以通过std_msgs::Header类在C++中访问。
为了能够发布消息,必须创建一个publisher对象:
ros::Publisher pub = n.advertise<std_msgs::Header>("topic_name", 1000);
1000为缓冲区的大小,通过pub函数进行发送消息:
pub.publish(message);
定于一个主题的时候需要创建一个callback函数,接收和处理订阅的topic的消息。
void callback(const std_msgs::Header::ConstPtr& msg);
创建一个subscriber,在消息publish到topic上时候会调用这个callback函数。
ros::Subscriber sub = n.subscribe("topic_name", 1000, callback);
也可以把callback函数写作类里面:
ros::Subscriber sub = n.subscribe("topic_name", 1000, &SomeClass::callback, instanceOfThatClass);
最后调用spin,开始subscribe消息:
ros::spin();
###ROS常用调试图形化工具
rqt
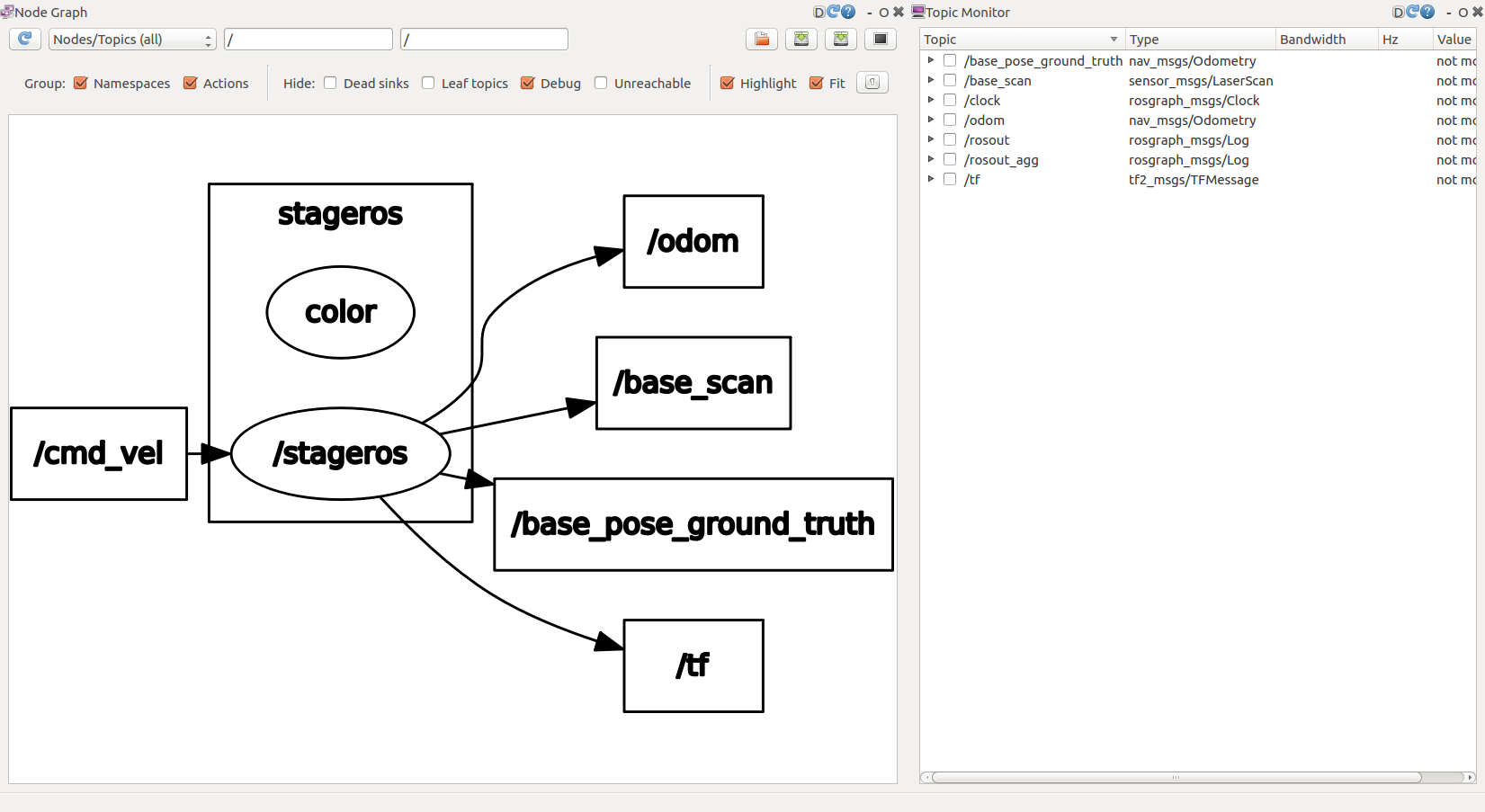
rviz
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UUrcvdY2-1593495897541)(https://img-blog.csdn.net/20171119164111634?watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQvd190b20=/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/SouthEast)]
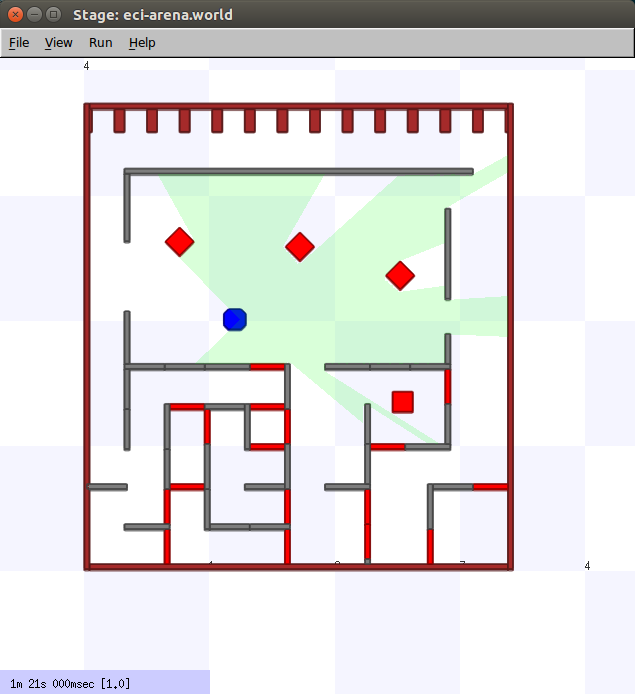
###机器人stage 仿真
下载仿真机器和环境:(右键另存为)
eci-arena.world
运行指令启动仿真环境:
rosrun stage_ros stageros <path_to_the_world_file>/eci-arena.world

















 764
764

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









