







本文目录
Hadoop概述
什么是Hadoop?
Hadoop是Apache基金会旗下的一个分布式系统基础架构。
主要包括分布式文件系统HDFS、分布式计算系统MapReduce和分布式资源管理系统YARN。
Hadoop生态圈
1、概述
狭义的Hadoop:是一个适合大数据分布式存储和分布式计算的平台,包括HDFS、MapReduce和YARN。
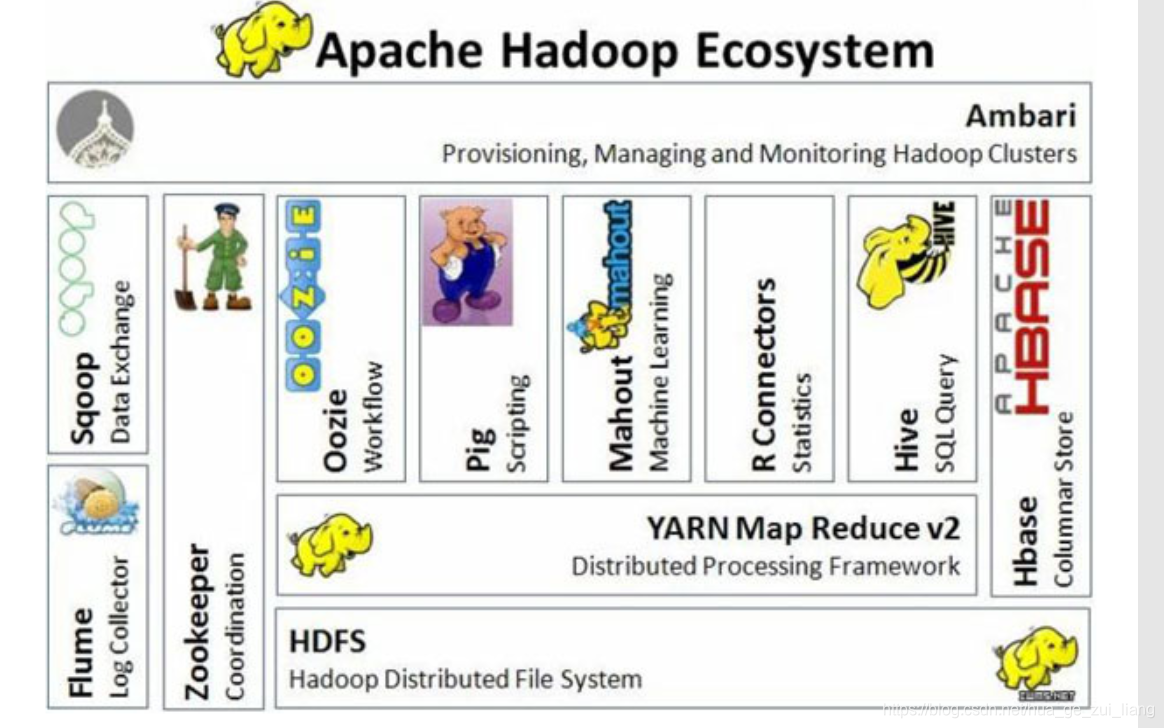
广义的Hadoop:指以Hadoop为基础的生态圈,是一个很庞大的体系,Hadoop只是其中最重要、最基础的一部分;生态圈中的每个子系统只负责解决某一个特定的问题域(甚至可能更窄),它并不是一个全能系统,而是多个小而精的系统。Hadoop生态圈的主要构成如下图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 463
463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









