






前言
本人刚接触carla的交通场景仿真,从roadrunner画图,导入到UE4的编辑器中,然后供carla使用。因为完全是新手,而且carla各种版本,官方文档让我看的有点晕,只能自己靠各种教程慢慢摸索,之前写过一版的地图导入方法,在后续的工作中发现有些缺陷,现在搞个“导入地图”的2.0版本,作为工作记录吧。本文偏个人向,如果有大神看了可能觉得通篇废话,如果有和我一样的小白,也希望能帮助到大家。
我使用软件环境是Ubuntu18、 roadrunner2022b、UE4.24、 carla0.9.10,硬件环境在2080super的工控机上跑,不知道是不是性能还是不够,UE会偶发crash的情况。言归正传开始正式的地图导入工作。
准备工作
首先你需要安装好对应的软件版本,这一环节不再赘述了,网上资源很多,无非是安装roadrunner(正版需要license),安装UE(需要一个E宝的账号),安装Carla(本文不适用下载压缩包,解压直接使用那种安装方式*)。
*注:至我写本文的时间,我认为carla的安装有(表述不一定正确,意会即可):
①下载一个轮子用update的方式安装,大约需要两三个小时的时间吧,视个人网速而定;
②直接下载两个压缩包,一共大约10G左右吧,解压直接可以跑demo;
本文要写的这种导入地图方式,应该是利用UE4的编辑器界面,导入地图,后创建出一个独立的文件,类似方法②下载下来的东西,这样后续地图建好,就不需要每次都启动UE的界面了
导入roadrunner的地图还需要UE的一个插件,从MathWorks官网上下载。参考RoadRunner Scenario+CARLA联合仿真 - 知乎 (zhihu.com)中第一小节的部分。
安装了以上的内容,并确保可以运行carla自带的demo以后,进入导入地图部分。
地图导出和导入
导出
地图导出部分很简单,从roadrunner中画一个你自己的地图,我这里画了个简单的圈,然后命名,导出为carla格式,会生成四个文件,记住他们的位置和名称后面要用。
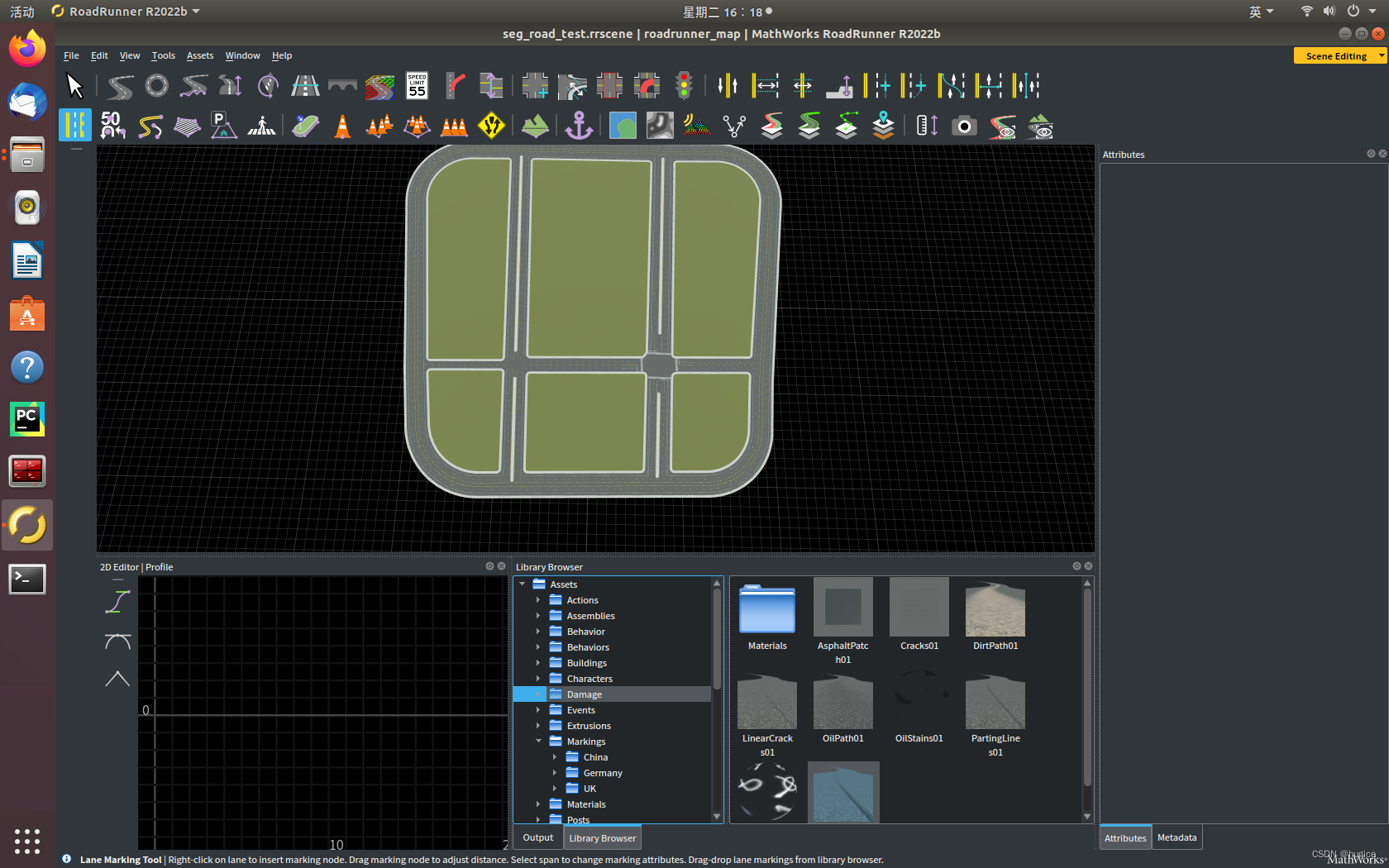
这一部分网上很多资源,而且操作起来没什么坑,我说两个我自己注意到的问题(可能说的不对,或者是我自己的个例,仅供参考):
①如果你和我的目的类似,创建一个接近真实的仿真交通场景,那么建议roadrunner中仅仅画出你想要的道路即可,换句话说,roadrunner提供的树木建筑尽量不要用。因为,一方面UE中的素材更多更真实,同时如果再roadrunner导入UE的过程中会增加导入时长,严重的还会造成UE崩溃(如果你的硬件一般);
②roadrunner创建的道路尽量闭合,或者至少形成交叉路口。我尝试过,如果道路不闭合,导入UE后可能缺少车辆出生点等问题;
......后续有什么tips会再补充......
导入
地图导入部分,这里要注意好文件夹的关系,文件命名等(个人觉得原有的UE/CARLA素材地图已经较多了,搞混了很麻烦)。
在UE的界面下存在一个Carla的大文件夹,保存了carla自带的素材、地图等等,我在这个同级文件夹下创建了一个roadrunner,roadrunner下创建map和static两个文件夹,其中static用来保存roadrunner导入的素材。
1.执行make launch进入UE编辑器,在Static这个目录下,import你roadrunner导出的fbx文件。
选项卡Scene中选择创建蓝图,以及在选项卡Static Meshes中选择导入法线
 2. 如果你的地图不大,这一步很快就完成了,然后你会看到你自己画的地图在UE的界面中,去到Carla/BluePrints/Weather下拉一个BP_Sky进来,不然运行起来你的天空是黑色的。
2. 如果你的地图不大,这一步很快就完成了,然后你会看到你自己画的地图在UE的界面中,去到Carla/BluePrints/Weather下拉一个BP_Sky进来,不然运行起来你的天空是黑色的。
3.保存地图为关卡,去UE界面的左上角,“编辑”/“项目设置”中,在“地图和模式”中可以添加默认打开的地图,在“正在打包”一栏中打开高级选项,在“打包版本中要包括的地图列表”中,加入你创建的地图,位置可能在“Carla/Maps/”下。 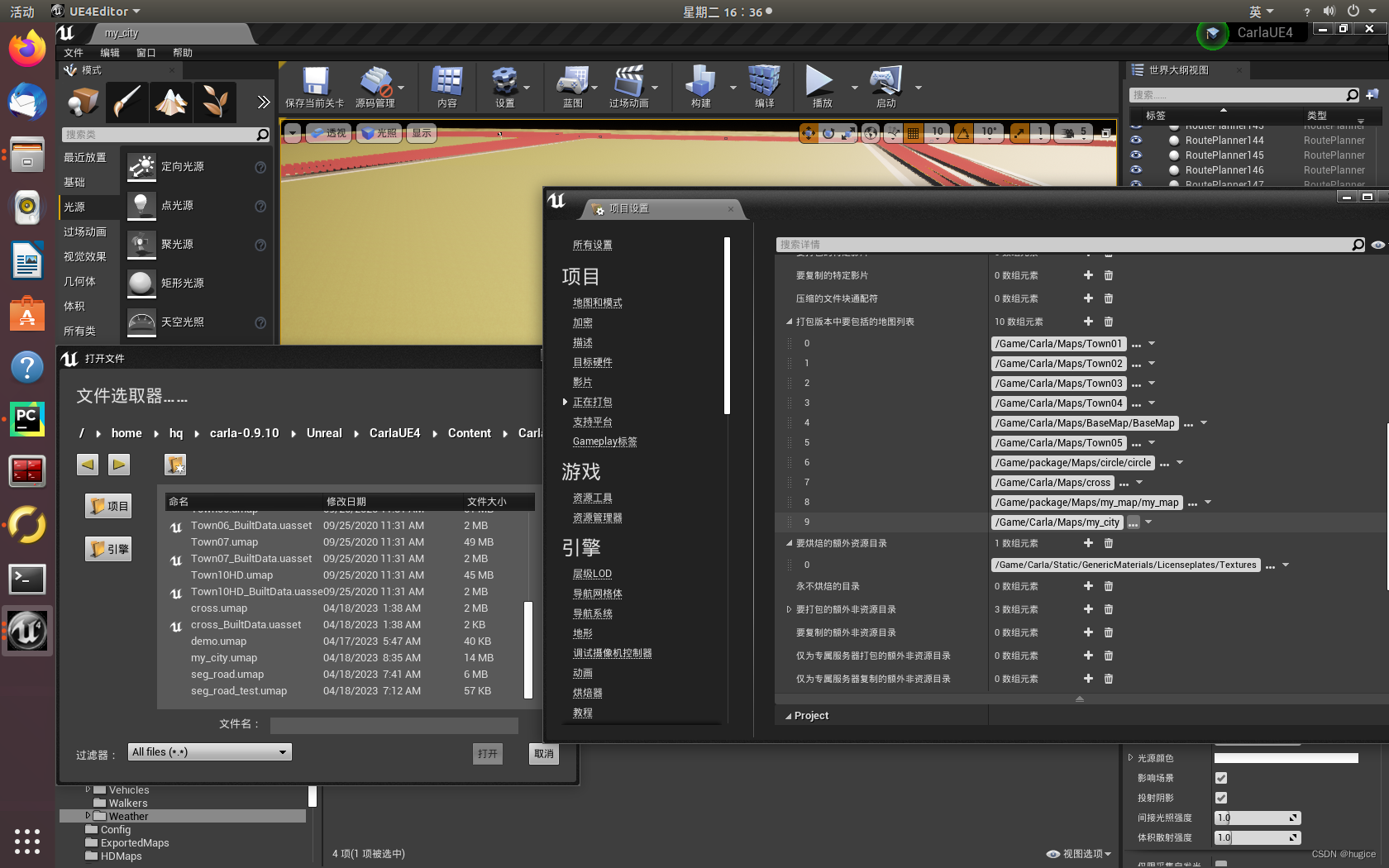
4.保存后关闭UE界面,执行make package,这一步可以把设置的地图编译成一个不需要UE界面即可打开的可执行文件,类似上面说到的,下载carla压缩包的方式得到的东西。编译完成后在Carla根目录下的Dist文件夹中可以找到。
这一步第一次操作要很久,可能几十分钟到几个小时不等,后续再编译时间也不短,至少需要几分钟(在我的电脑上)
使用
编译结束在Carla/Dist/CARLA_Shippingxxxx/LinuxNoEditor(windows下就叫WindowsNoEditor)下可以找到一个CarlaUE4.sh的可执行文件,这个LinuxNoEditor文件夹也类似于下载carla压缩包得到的那个文件夹,直接执行上面的文件,就可以得到carla的启动界面,应该是你自己画的地图。再运行相关的demo。
补充说明:
①个人理解carla的demo运行类似与ros,carla需要首先运行上面的可执行文件,或者从UE的界面启动,这一步相当于roscore;然后再运行各种demo或者自己写的脚本,类似调用ros的各种包balabala......
②之所以记录本文的内容,和之前我写的那个导入地图的方法区别在于:
a)帧率提高:在NoEditor的界面运行demo,帧率可以达到80以上,我这里UE端启动帧率只有个位数且迟迟没有解决;
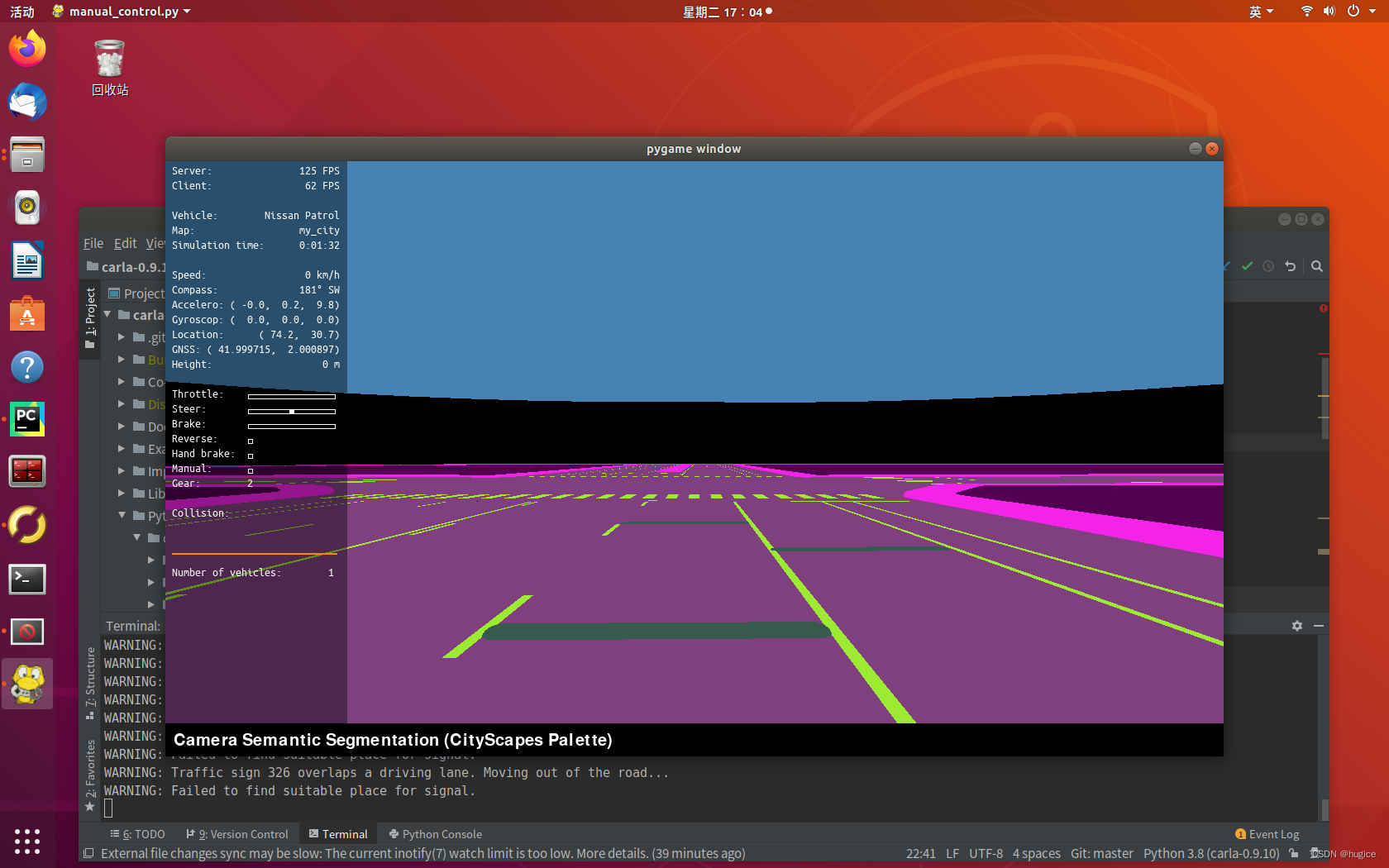
b)有语义分割结果:用自带的manual_control.py运行,之前的方法导入地图,在语义分割的输出上地面道路是灰色的,而这个可以输出路面及车道线。(如果做虚拟场景数据集方便很多)
















 3232
3232











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









