






四轮独立驱动汽车 MPC分层控制器 上层MPC dyc+afs 下层非线性优化
四轮独立驱动汽车(Four-wheel independent drive electric vehicle)转矩分配 DYC 与AFS控制CarSim与Simulink联合
MPC算法代码明晰可见,有利于算法学习
MPC问题转化为二次规划进行求解
下层规划提供多种方法:序列二次规划,有效集算法,内点法等
有详细说明
MATLAB版本为2018b CarSim版本为2018
ID:9189671468333881
让一部分人先把模型搞起来
四轮独立驱动汽车是一种新兴的汽车技术,它拥有四个独立驱动的电机,可以实现更加灵活的动力分配和操控性能。在这种汽车中,MPC(模型预测控制)分层控制器起着关键作用,帮助实现更高效、更精确的控制。
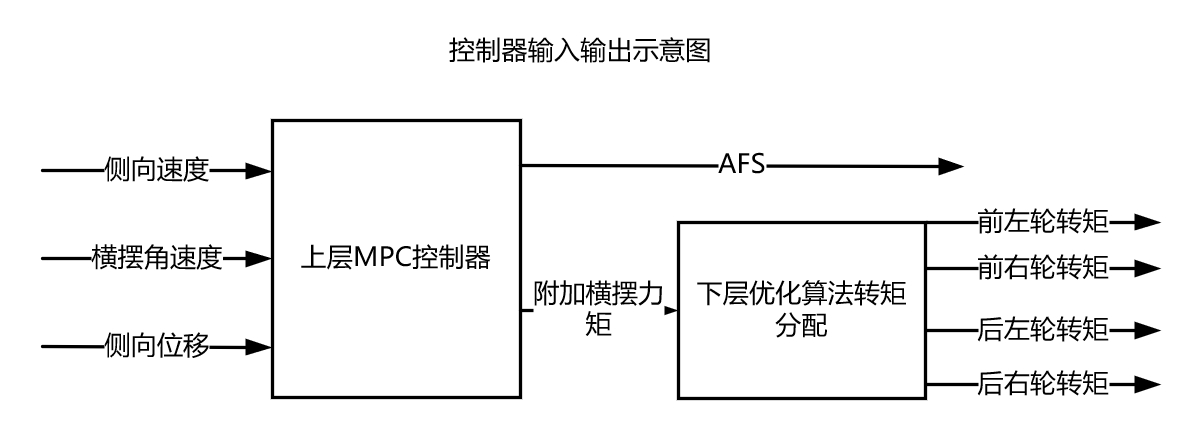
上层MPC(Model Predictive Control)dyc+afs控制策略是四轮独立驱动汽车的核心技术之一。通过MPC算法的运算,实现对车辆的动力分配控制,提高车辆的操控性能和安全性。
在四轮独立驱动汽车中,DYC(Dynamic Yaw Control)和AFS(Active Front Steering)是两个重要的控制模块。DYC用于控制车辆的侧向运动,通过调整四个电机的转矩分配,实现对车辆侧向运动的控制。而AFS则用于控制前轮转向角度,通过调整前轮的转向角度,进一步增强车辆的操控性能。CarSim和Simulink是两种常用的车辆仿真软件,可以模拟并验证这些控制策略在不同场景下的效果。
MPC算法在四轮独立驱动汽车中的应用非常广泛。MPC算法的核心思想是将控制问题转化为二次规划问题进行求解。通过对车辆的模型进行建模,考虑到车辆的动力学和控制约束条件,可以将车辆的控制问题转化为一个二次规划问题,然后利用优化算法求解得到最优的控制策略。
在MPC算法中,下层规划提供了多种方法来解决二次规划问题。其中,序列二次规划、有效集算法和内点法都是常用的求解方法。这些方法在不同的场景下具有不同的优势和适用性,可以根据具体的问题要求来选择合适的方法。
通过MATLAB的编程,可以实现MPC算法的代码明晰可见,便于学习和理解。MATLAB是一种功能强大的数值计算和数据可视化软件,具有丰富的工具箱和函数,可以方便地实现MPC算法,并进行仿真和验证。
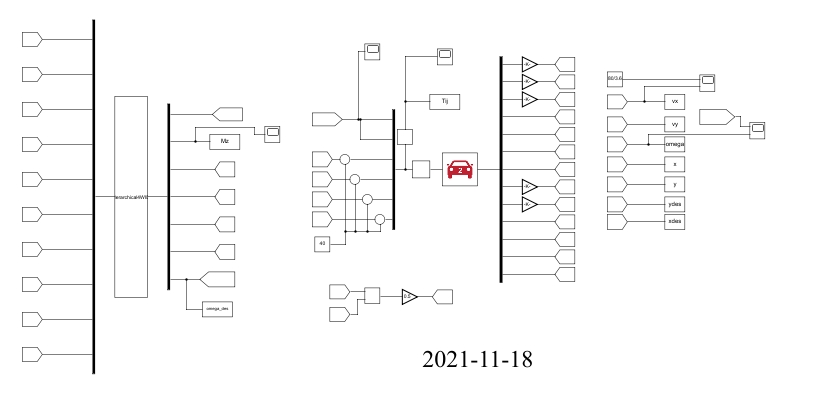
在进行四轮独立驱动汽车的控制系统设计和开发过程中,CarSim和Simulink的联合应用起到了重要的作用。CarSim是一种专门用于车辆动力学仿真的软件,可以准确地模拟车辆在各种道路和驾驶条件下的行为。Simulink是MATLAB的一个工具箱,可以进行系统级建模和仿真。通过CarSim和Simulink的联合应用,可以更加准确地验证和优化控制策略,提高四轮独立驱动汽车的操控性能和安全性。
总之,四轮独立驱动汽车的控制系统设计涉及到许多技术问题,其中MPC分层控制器、DYC、AFS和下层非线性优化等是关键技术。通过MATLAB的编程和CarSim、Simulink的联合应用,可以实现对四轮独立驱动汽车控制系统的建模、仿真和优化,提高车辆的操控性能和安全性。未来的研究可以进一步深入探讨这些技术的优化和应用,以满足不断发展的汽车工业的需求。
相关的代码,程序地址如下:http://wekup.cn/671468333881.html
















 754
754

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









