






四轮独立驱动/转向路径跟踪及车辆稳定性控制
模型预测控制MPC
上层4WS+DYC,下层阿克曼转向分配和最小轮胎负荷率驱动力矩分配
ID:97150712370229968
明朝多话的烧饼
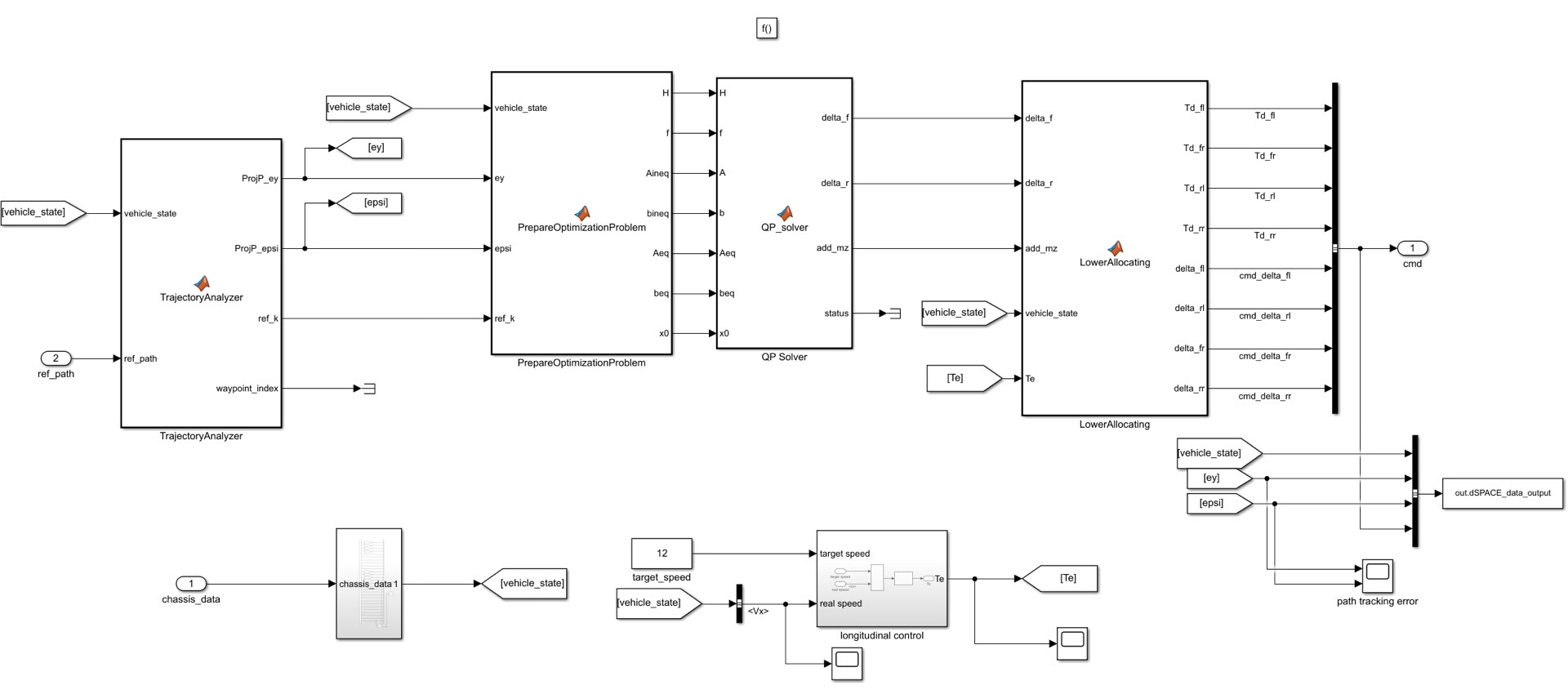


四轮独立驱动,转向路径跟踪及车辆稳定性控制是现代汽车动力系统设计中的关键问题之一。为了实现更高的驾驶稳定性和精准的转向控制,许多先进的控制技术被应用在汽车中。本文将聚焦于模型预测控制(MPC)技术在四轮独立驱动、转向路径跟踪和车辆稳定性控制中的应用。
MPC是一种基于数学模型的控制策略,它通过预测未来一段时间内的车辆行为,并根据这些预测结果做出相应的控制决策。在四轮独立驱动系统中,MPC可以被用来优化车辆的轨迹跟踪性能,以及提高车辆的动力性能和稳定性。
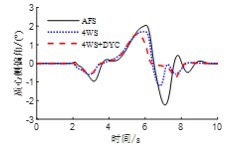
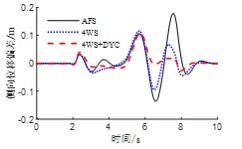
在上层控制层面,4WS+DYC技术被用来实现车辆的转向路径跟踪。4WS表示四轮转向系统,它通过控制前后轮的转向角度,实现更灵活的车辆转向性能。DYC则是指动态转向控制系统,它可以根据车辆的动态行为和路面状况,自动调整车辆的转向角度,以提高转向精度和稳定性。
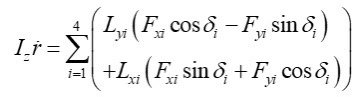
在下层控制层面,阿克曼转向分配和最小轮胎负荷率驱动力矩分配是关键技术。阿克曼转向分配是一种根据车辆的转弯半径和速度,以及前后轮的滑移率,自动调整前后轮的转向角度,以实现最佳的转向性能和稳定性。最小轮胎负荷率驱动力矩分配则是通过监测车辆各个轮胎的载荷和滑移率,自动调整不同轮胎的驱动力矩,以提高车辆的操控性能和稳定性。
综上所述,四轮独立驱动,转向路径跟踪及车辆稳定性控制是汽车动力系统设计中的重要问题。通过应用模型预测控制技术,结合上层4WS+DYC和下层阿克曼转向分配和最小轮胎负荷率驱动力矩分配,可以实现更高的驾驶稳定性和精准的转向控制。未来,随着技术的不断发展和创新,相信这些控制技术还将不断优化和完善,为汽车驾驶带来更高的安全性和舒适性。
【相关代码,程序地址】:http://fansik.cn/712370229968.html


















 917
917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









