







本文的主要参考为官方文档OpenCV249-fitLine和博客-OpenCV 学习(直线拟合)
以及《Learning OpenCV 3》page425-426
OpenCV中提供的直线拟合API如下:
void fitLine(InputArray points, OutputArray line, int distType, double param, double reps, double aeps)算法:OpenCV中共提供了6种直线拟合的算法,如下图所示,其中第一种就是最常用的最小二乘法。但是最小二乘法受噪声的影响很大,别的方法具有一定的抗干扰性,但是具体的数学原理不是很理解。
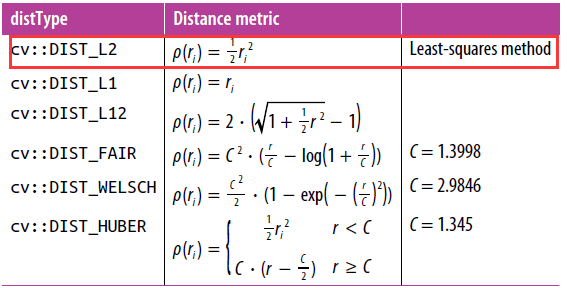
输出:拟合结果为一个四元素的容器,比如Vec4f - (vx, vy, x0, y0)。其中(vx, vy) 是直线的方向向量,(x0, y0) 是直线上的一个点。
示例代码如下:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main( )
{
const char* filename = "1.bmp";
Mat src_image = imread(filename,1);
if( src_image.empty() )
{
cout << "Couldn't open image!" << filename;
return 0;
}
int img_width = src_image.cols;
int img_height = src_image.rows;
Mat gray_image,bool_image;
cvtColor(src_image,gray_image,CV_RGB2GRAY);
threshold(gray_image,bool_image,0,255,CV_THRESH_OTSU);
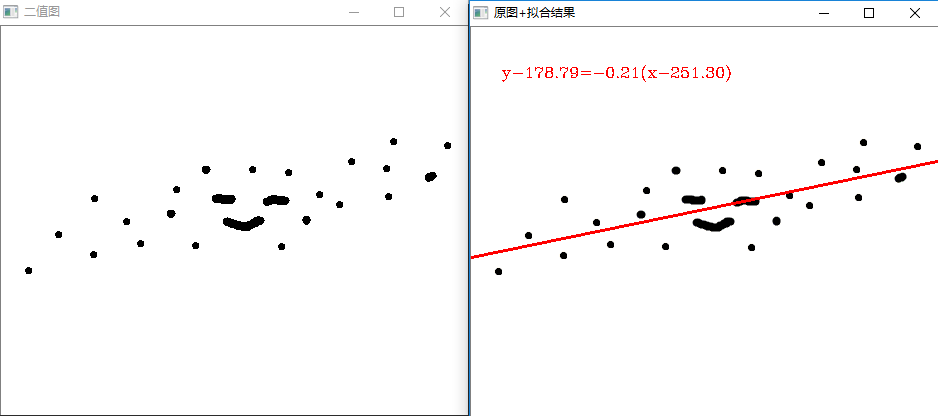
imshow("二值图", bool_image);
//获取二维点集
vector<Point> point_set;
Point point_temp;
for( int i = 0; i < img_height; ++i)
{
for( int j = 0; j < img_width; ++j )
{
if (bool_image.at<unsigned char>(i,j) < 255)
{
point_temp.x = j;
point_temp.y = i;
point_set.push_back(point_temp);
}
}
}
//直线拟合
//拟合结果为一个四元素的容器,比如Vec4f - (vx, vy, x0, y0)
//其中(vx, vy) 是直线的方向向量
//(x0, y0) 是直线上的一个点
Vec4f fitline;
//拟合方法采用最小二乘法
fitLine(point_set,fitline,CV_DIST_L2,0,0.01,0.01);
//求出直线上的两个点
double k_line = fitline[1]/fitline[0];
Point p1(0,k_line*(0 - fitline[2]) + fitline[3]);
Point p2(img_width - 1,k_line*(img_width - 1 - fitline[2]) + fitline[3]);
//显示拟合出的直线方程
char text_equation[1024];
sprintf(text_equation,"y-%.2f=%.2f(x-%.2f)",fitline[3],k_line,fitline[2]);
putText(src_image,text_equation,Point(30,50),CV_FONT_HERSHEY_COMPLEX,0.5,Scalar(0,0,255),1,8);
//显示拟合出的直线
line(src_image,p1,p2,Scalar(0,0,255),2);
imshow("原图+拟合结果", src_image);
waitKey();
return 0;
}















 850
850

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









