







之前的IS3DWB遇到了一些bug,在联系FAE修改。目前用polling的代码修改,识别到whoami错误。屏蔽掉这部分后只能读取到一次数据,之后会卡在循环中。
看了下nanoedge AI貌似对这个传感器不太好用,所以换ISM330传感器来采集数据1.传感器简介
ISM330DHCX是一种系统级封装器件,它具有专为工业4.0应用而量身定制的高性能3D数字加速度计和3D数字陀螺仪。加速计可选量程为±2/±4/±8/±16 g,陀螺仪可选量程为±125/±250/±500/±1000/±2000/±4000 dps,能够用在各种应用中。并且在ISM330DHCX的所有设计环节和校准方面进行了优化,实现了极高的精度、稳定性、极低噪声和完全的数据同步。
另外,ISM330DHCX还有:
- 可编程有限状态机,处理来自加速度计、陀螺仪和一个外部传感器的数据
- 机器学习内核
- 智能嵌入式功能和中断:倾斜检测、自由落体、唤醒、6D/4D方向检测、单击和双击
该传感器完全可以满足工业自动化中各类电机的监测功能。
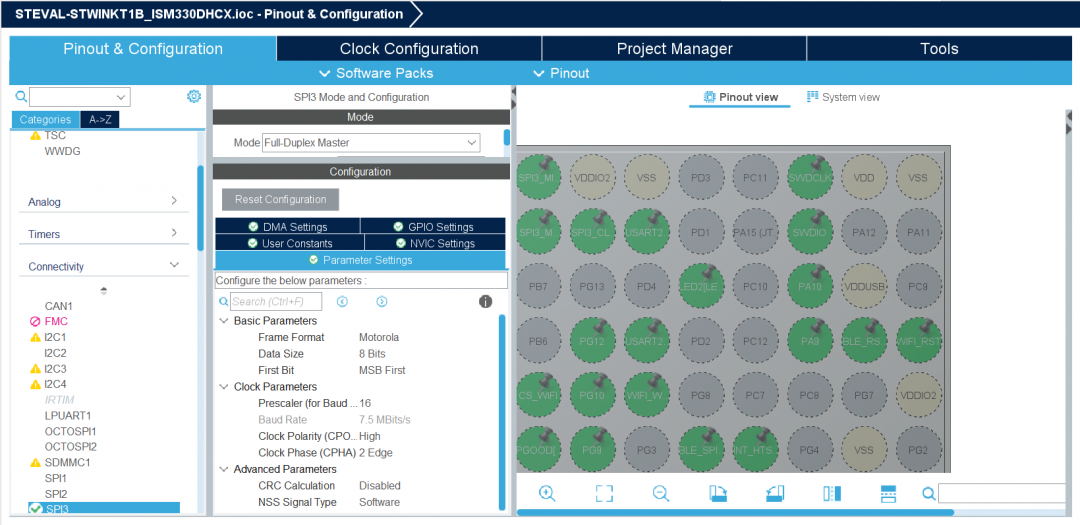
2.初始化配置:
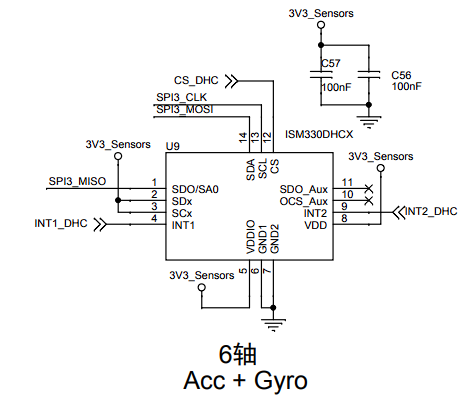
基础配置和IS3DWB别无二致,只需要改一下对应的引脚即可。

![]()
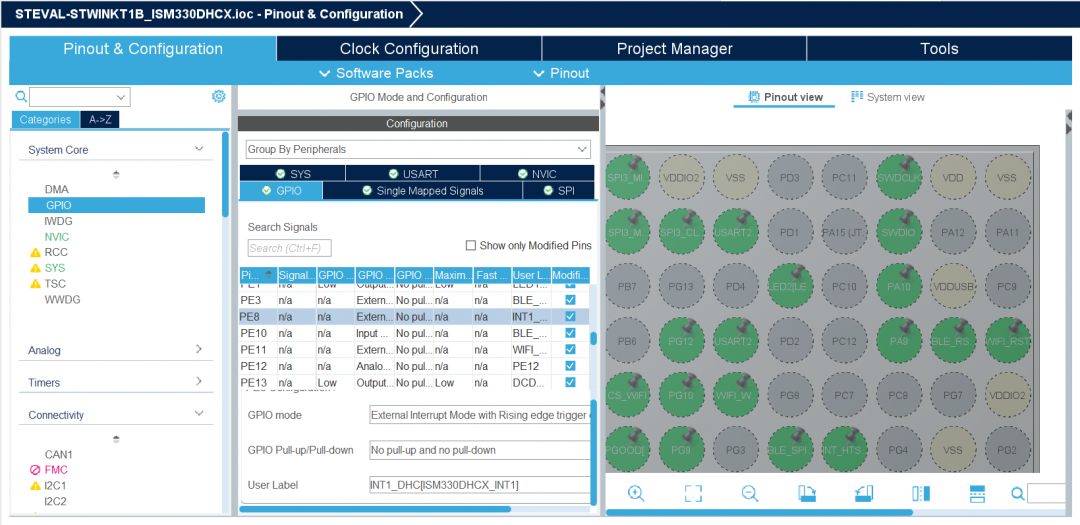
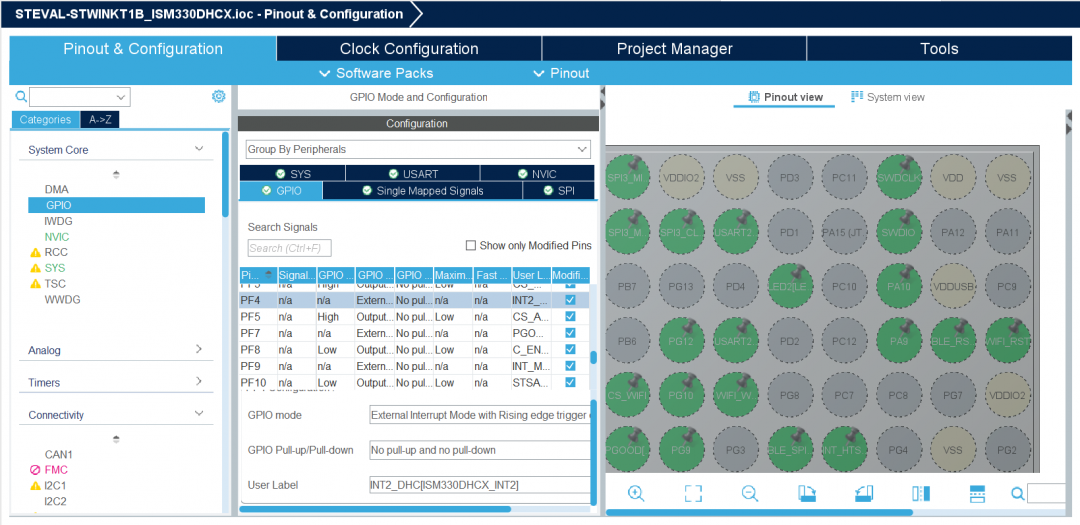
另外INT1/INT2这两个引脚是配置传感器内部寄存器的
![]()
![]()
经询问ST的FAE,这两个引脚不配置也可以正常工作,只是工作模式固定

具体的IO配置如图:
cube-mems包的配置同前一篇帖子,不再展示
4.代码分析:
定义加速度、陀螺仪的参数:
复制
#ifndef AXIS
#define AXIS 3 /* Axis should be defined between 1 and 3 */
#endif
#ifndef SAMPLES
#define SAMPLES 256 /* Should be between 16 & 4096 */
#endif
#define MAX_FIFO_SIZE 256 /* The maximum number of data we can get in the FIFO is 512 but here we define max to 256 for our need */
#define FIFO_FULL 512 /* FIFO full size */
/************************************************************ Sensor type part ************************************************************/
#define ACCELEROMETER /* Could be either ACCELEROMETER or GYROSCOPE */
/************************************************************ Sensors configuration part ************************************************************/
#ifdef ACCELEROMETER
#ifndef ACCELEROMETER_ODR
#define ACCELEROMETER_ODR ISM330DHCX_XL_ODR_1666Hz /* Shoud be between ISM330DHCX_XL_ODR_12Hz5 and ISM330DHCX_XL_ODR_6667Hz */
#endif
#ifndef ACCELEROMETER_FS
#define ACCELEROMETER_FS ISM330DHCX_2g /* Should be between ISM330DHCX_2g and ISM330DHCX_8g */
#endif
#else
#ifndef GYROSCOPE_ODR
#define GYROSCOPE_ODR ISM330DHCX_GY_ODR_1666Hz /* Shoud be between ISM330DHCX_GY_ODR_12Hz5 and ISM330DHCX_GY_ODR_6667Hz */
#endif
#ifndef GYROSCOPE_FS
#define GYROSCOPE_FS ISM330DHCX_2000dps /* Should be between ISM330DHCX_125dps and ISM330DHCX_4000dps */
#endif
#endif
/************************************************************ Datalogger / NEAI mode part ************************************************************/
#ifndef NEAI_MODE
#define NEAI_MODE 0 /* 0: Datalogger mode, 1: NEAI functions mode */
#endif
#if (NEAI_MODE == 1)
#ifndef NEAI_LEARN_NB
#define NEAI_LEARN_NB 20 /* Number of buffers to be learn by the NEAI library */
#endif
#endif定义部分
复制
/* USER CODE BEGIN PV */
static int16_t data_raw_acceleration[3];
static int16_t data_raw_angular_rate[3];
static uint8_t whoamI, rst;
uint8_t neai_similarity = 0, neai_state = 0;
volatile uint8_t drdy = 0;
uint16_t data_left = (uint16_t) SAMPLES, number_read = 0, neai_buffer_ptr = 0, neai_cnt = 0;
float neai_time = 0.0;
static float neai_buffer[AXIS * SAMPLES] = {0.0};
stmdev_ctx_t dev_ctx;
/* USER CODE END PV */初始化要用到的函数:
复制
/* USER CODE BEGIN PV */
static int16_t data_raw_acceleration[3];
static int16_t data_raw_angular_rate[3];
static uint8_t whoamI, rst;
uint8_t neai_similarity = 0, neai_state = 0;
volatile uint8_t drdy = 0;
uint16_t data_left = (uint16_t) SAMPLES, number_read = 0, neai_buffer_ptr = 0, neai_cnt = 0;
float neai_time = 0.0;
static float neai_buffer[AXIS * SAMPLES] = {0.0};
stmdev_ctx_t dev_ctx;
/* USER CODE END PV */复制
/* USER CODE BEGIN PFP */
static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len);
static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len);
static void ism330dhcx_initialize(void);
static void ism330dhcx_initialize_basics(void);
static void ism330dhcx_initialize_fifo(void);
static void ism330dhcx_get_buffer_from_fifo(uint16_t nb);
static float ism330dhcx_convert_gyro_data_to_mdps(int16_t gyro_raw_data);
static float ism330dhcx_convert_accel_data_to_mg(int16_t accel_raw_data);
/* USER CODE END PFP */
同前一篇帖子一样,定义platform
复制
/* USER CODE BEGIN 1 */
/* Initialize mems driver interface */
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.handle = &hspi3;
/* USER CODE END 1 */在主循环中用FIFO采集加速度数据,并用串口打印出来。
复制
while (1)
{
uint8_t wtm_flag = 0, status2 = 0;
uint16_t num = 0;
if (drdy) {
/* Reset data ready condition */
drdy = 0;
ism330dhcx_read_reg(&dev_ctx, ISM330DHCX_FIFO_STATUS2, &status2, 1);
wtm_flag = status2 >> 7;
if (wtm_flag) {
ism330dhcx_fifo_data_level_get(&dev_ctx, &num);
if (data_left < num) {
num = data_left;
}
ism330dhcx_get_buffer_from_fifo(num);
data_left -= num;
number_read += num;
if (data_left == 0) {
ism330dhcx_fifo_mode_set(&dev_ctx, ISM330DHCX_BYPASS_MODE);
#if NEAI_MODE
uint32_t cycles_cnt = 0;
if (neai_cnt < NEAI_LEARN_NB) {
neai_cnt++;
KIN1_ResetCycleCounter();
neai_state = neai_anomalydetection_learn(neai_buffer);
cycles_cnt = KIN1_GetCycleCounter();
neai_time = (cycles_cnt * 1000000.0) / HAL_RCC_GetSysClockFreq();
printf("Learn: %d / %d. NEAI learn return: %d. Cycles counter: %ld = %.1f µs at %ld Hz.\n",
neai_cnt, NEAI_LEARN_NB, neai_state, cycles_cnt, neai_time, HAL_RCC_GetSysClockFreq());
}
else {
KIN1_ResetCycleCounter();
neai_state = neai_anomalydetection_detect(neai_buffer, &neai_similarity);
cycles_cnt = KIN1_GetCycleCounter();
neai_time = (cycles_cnt * 1000000.0) / HAL_RCC_GetSysClockFreq();
printf("Similarity: %d / 100. NEAI detect return: %d. Cycles counter: %ld = %.1f µs at %ld Hz.\n",
neai_similarity, neai_state, cycles_cnt, neai_time, HAL_RCC_GetSysClockFreq());
}
#else
for (uint16_t i = 0; i < AXIS * SAMPLES; i++) {
printf("%.3f ", neai_buffer[i]);
}
printf("\n");
#endif
data_left = (uint16_t) SAMPLES;
number_read = 0;
memset(neai_buffer, 0x00, AXIS * SAMPLES * sizeof(float));
if (SAMPLES <= MAX_FIFO_SIZE) {
ism330dhcx_fifo_watermark_set(&dev_ctx, (uint16_t) SAMPLES);
}
else {
ism330dhcx_fifo_watermark_set(&dev_ctx, (uint16_t) MAX_FIFO_SIZE);
}
ism330dhcx_fifo_mode_set(&dev_ctx, ISM330DHCX_STREAM_MODE);
}
else if (data_left < MAX_FIFO_SIZE) {
ism330dhcx_fifo_watermark_set(&dev_ctx, data_left);
}
}
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
另外把串口数据打印部分重定义一下:
复制
int __io_putchar(int ch)
{
uint8_t c[1];
c[0] = ch & 0x00FF;
HAL_UART_Transmit(&huart2, &*c, 1, 10);
return ch;
}其他几个函数如写入,读取等直接使用例程:
复制
static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len)
{
HAL_GPIO_WritePin(CS_DHC_GPIO_Port, CS_DHC_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(handle, ®, 1, 1000);
HAL_SPI_Transmit(handle, (uint8_t*) bufp, len, 1000);
HAL_GPIO_WritePin(CS_DHC_GPIO_Port, CS_DHC_Pin, GPIO_PIN_SET);
return 0;
}
/*
* [url=home.php?mod=space&uid=247401]@brief[/url] Read generic device register (platform dependent)
*
* @param handle customizable argument. In this examples is used in
* order to select the correct sensor bus handler.
* @param reg register to read
* @param bufp pointer to buffer that store the data read
* @param len number of consecutive register to read
*
*/
static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len)
{
reg |= 0x80;
HAL_GPIO_WritePin(CS_DHC_GPIO_Port, CS_DHC_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(handle, ®, 1, 1000);
HAL_SPI_Receive(handle, bufp, len, 1000);
HAL_GPIO_WritePin(CS_DHC_GPIO_Port, CS_DHC_Pin, GPIO_PIN_SET);
return 0;
}
/*
* [url=home.php?mod=space&uid=247401]@brief[/url] Initialize ISM330DHCX sensor interface
*
* @param No
*
* [url=home.php?mod=space&uid=266161]@return[/url] No
*
*/
static void ism330dhcx_initialize()
{
ism330dhcx_initialize_basics();
#ifdef ACCELEROMETER
/* Accelelerometer configuration */
ism330dhcx_xl_data_rate_set(&dev_ctx, ACCELEROMETER_ODR);
ism330dhcx_xl_full_scale_set(&dev_ctx, ACCELEROMETER_FS);
#else
/* Gyroscope configuration */
ism330dhcx_gy_data_rate_set(&dev_ctx, GYROSCOPE_ODR);
ism330dhcx_gy_full_scale_set(&dev_ctx, GYROSCOPE_FS);
#endif
ism330dhcx_initialize_fifo();
}
/*
* @brief Initialize ISM330DHCX basics
*
* @param No
*
* [url=home.php?mod=space&uid=266161]@return[/url] No
*
*/
static void ism330dhcx_initialize_basics()
{
/* Check device ID */
whoamI = 0;
do {
/* Wait sensor boot time */
HAL_Delay(10);
ism330dhcx_device_id_get(&dev_ctx, &whoamI);
} while (whoamI != ISM330DHCX_ID);
/* Restore default configuration */
ism330dhcx_reset_set(&dev_ctx, PROPERTY_ENABLE);
do {
ism330dhcx_reset_get(&dev_ctx, &rst);
} while (rst);
/* Start device configuration. */
ism330dhcx_device_conf_set(&dev_ctx, PROPERTY_ENABLE);
}
/*
* @brief Initialize ISM330DHCX internal FIFO
*
* @param No
*
* @return No
*
*/
static void ism330dhcx_initialize_fifo()
{
#ifdef ACCELEROMETER
/* Batch odr config */
ism330dhcx_fifo_xl_batch_set(&dev_ctx, ACCELEROMETER_ODR);
ism330dhcx_fifo_gy_batch_set(&dev_ctx, 0);
#else
/* Batch odr config */
ism330dhcx_fifo_xl_batch_set(&dev_ctx, 0);
ism330dhcx_fifo_gy_batch_set(&dev_ctx, GYROSCOPE_ODR);
#endif
/* FIFO MODE */
ism330dhcx_fifo_mode_set(&dev_ctx, ISM330DHCX_BYPASS_MODE);
HAL_Delay(10);
ism330dhcx_fifo_mode_set(&dev_ctx, ISM330DHCX_STREAM_MODE);
/* Watermark config */
if (SAMPLES <= MAX_FIFO_SIZE) {
ism330dhcx_fifo_watermark_set(&dev_ctx, (uint16_t) SAMPLES);
}
else {
ism330dhcx_fifo_watermark_set(&dev_ctx, (uint16_t) MAX_FIFO_SIZE);
}
uint8_t ctrl = 0x08;
ism330dhcx_write_reg(&dev_ctx, ISM330DHCX_INT1_CTRL, (uint8_t *) &ctrl, 1);
}
/*
* @brief Get accelerometer or gyroscope data from
* ISM330DHCX using the internal FIFO buffer
*
* @param No
*
* @return No
*
*/
static void ism330dhcx_get_buffer_from_fifo(uint16_t nb)
{
static int16_t dummy[3];
ism330dhcx_fifo_tag_t reg_tag;
for (uint16_t i = 0; i < nb; i++) {
/* Read FIFO tag */
ism330dhcx_fifo_sensor_tag_get(&dev_ctx, ®_tag);
if(reg_tag == ISM330DHCX_XL_NC_TAG) {
memset(data_raw_acceleration, 0x00, 3 * sizeof(int16_t));
ism330dhcx_fifo_out_raw_get(&dev_ctx, (uint8_t *) data_raw_acceleration);
for(uint8_t j = 0; j < AXIS; j++) {
neai_buffer[(AXIS * neai_buffer_ptr) + (AXIS * i) + j] = ism330dhcx_convert_accel_data_to_mg(data_raw_acceleration[j]);
}
}
else if(reg_tag == ISM330DHCX_GYRO_NC_TAG) {
memset(data_raw_angular_rate, 0x00, 3 * sizeof(int16_t));
ism330dhcx_fifo_out_raw_get(&dev_ctx, (uint8_t *) data_raw_angular_rate);
for(uint8_t j = 0; j < AXIS; j++) {
neai_buffer[(AXIS * neai_buffer_ptr) + (AXIS * i) + j] = ism330dhcx_convert_gyro_data_to_mdps(data_raw_angular_rate[j]);
}
}
else {
/* Flush unused samples */
printf("Bad sensor tag: %d.\n", reg_tag);
memset(dummy, 0x00, 3 * sizeof(int16_t));
ism330dhcx_fifo_out_raw_get(&dev_ctx, (uint8_t *) dummy);
}
}
neai_buffer_ptr += nb;
if (neai_buffer_ptr == SAMPLES) {
neai_buffer_ptr = 0;
}
}
/*
* @brief Convert gyroscope raw data to milli degrees per second (mdps)
*
* @param gyro_raw_data: which is gyroscope raw data
* depending on the full scale selected
*
* @return The converted value in milli degrees per second (mdps)
*
*/
static float ism330dhcx_convert_gyro_data_to_mdps(int16_t gyro_raw_data)
{
float gyro_data_mdps = 0.0;
#ifdef GYROSCOPE
switch (GYROSCOPE_FS)
{
case ISM330DHCX_125dps:
gyro_data_mdps = ism330dhcx_from_fs125dps_to_mdps(gyro_raw_data);
break;
case ISM330DHCX_250dps:
gyro_data_mdps = ism330dhcx_from_fs250dps_to_mdps(gyro_raw_data);
break;
case ISM330DHCX_500dps:
gyro_data_mdps = ism330dhcx_from_fs500dps_to_mdps(gyro_raw_data);
break;
case ISM330DHCX_1000dps:
gyro_data_mdps = ism330dhcx_from_fs1000dps_to_mdps(gyro_raw_data);
break;
case ISM330DHCX_2000dps:
gyro_data_mdps = ism330dhcx_from_fs2000dps_to_mdps(gyro_raw_data);
break;
case ISM330DHCX_4000dps:
gyro_data_mdps = ism330dhcx_from_fs4000dps_to_mdps(gyro_raw_data);
break;
default:
gyro_data_mdps = 0.0;
break;
}
#endif
return gyro_data_mdps;
}
/*
* @brief Convert accelerometer raw data to milli-G' (mg)
*
* @param accel_raw_data: which is accelerometer raw data
* depending on the full scale selected
*
* @return The converted value in milli-G' (mg)
*
*/
static float ism330dhcx_convert_accel_data_to_mg(int16_t accel_raw_data)
{
float accel_data_mg = 0.0;
#ifdef ACCELEROMETER
switch (ACCELEROMETER_FS)
{
case ISM330DHCX_2g:
accel_data_mg = ism330dhcx_from_fs2g_to_mg(accel_raw_data);
break;
case ISM330DHCX_4g:
accel_data_mg = ism330dhcx_from_fs4g_to_mg(accel_raw_data);
break;
case ISM330DHCX_8g:
accel_data_mg = ism330dhcx_from_fs8g_to_mg(accel_raw_data);
break;
case ISM330DHCX_16g:
accel_data_mg = ism330dhcx_from_fs16g_to_mg(accel_raw_data);
break;
default:
accel_data_mg = 0.0;
break;
}
#endif
return accel_data_mg;
}
代码编译,烧录到板卡中即可。
---------------------
作者:电子烂人
链接:https://bbs.21ic.com/icview-3398682-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。















 344
344

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









