






基于改进A*算法融合DWA算法的机器人路径规划MATLAB仿真程序(含注释)
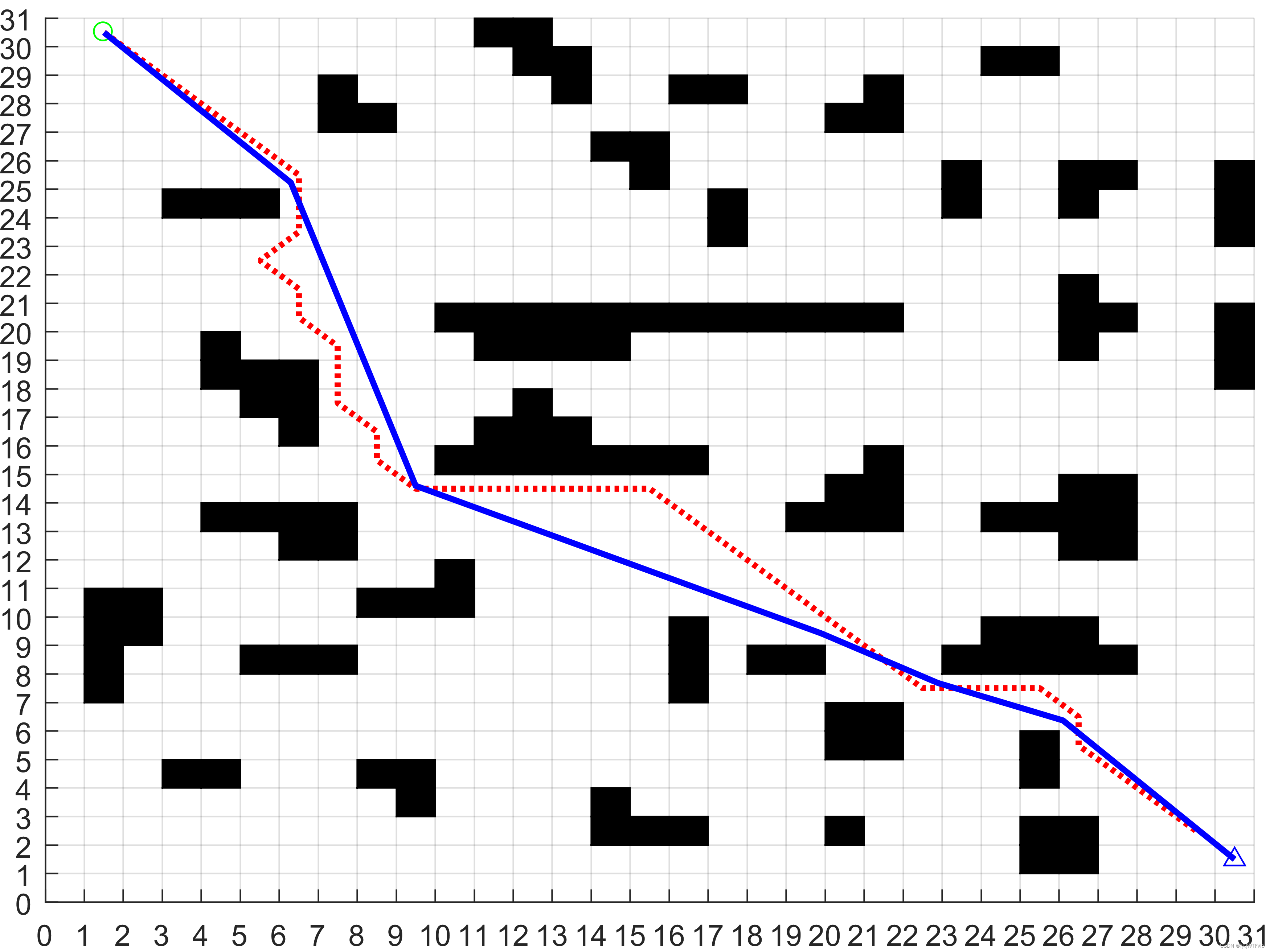
包含传统A*算法与改进A*算法性能对比?改进A*算法融合DWA算法规避未知障碍物仿真。
??算法经过创新改进(配有说明),两套代码就是一篇lunwen完整的实验逻辑,拿来直接使用,省心
改进A*算法做全局路径规划,融合动态窗口算法DWA做局部路径规划既可规避动态障碍物,又可与障碍物保持一定距离。
任意设置起点与终点,未知动态障碍物与未知静态障碍物。
地图可更改,可自行设置多种尺寸地图进行对比,包含单个算法的仿真结果及角速度线速度姿态位角的变化曲线,仿真图片丰富





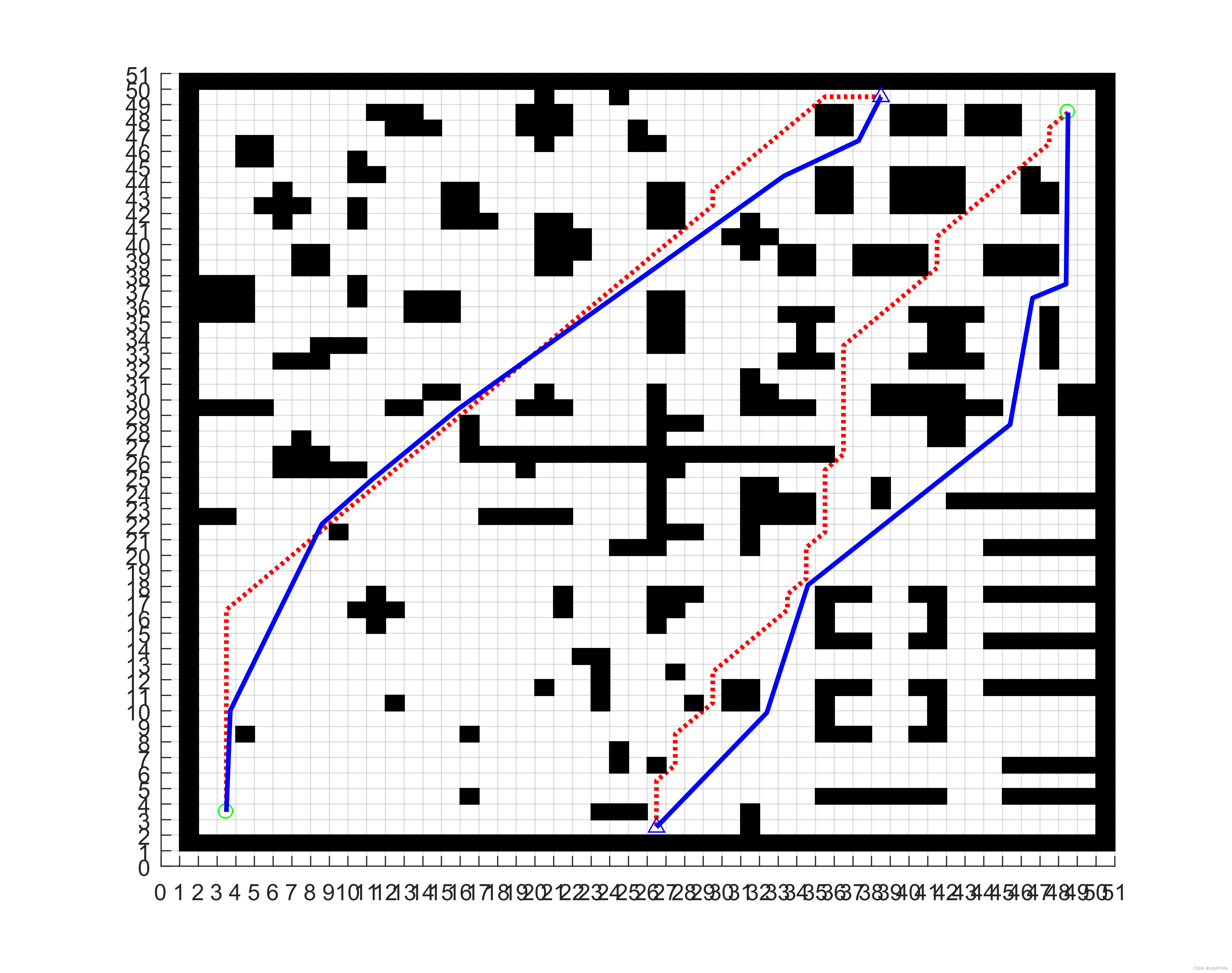
改进A算法融合DWA算法的机器人路径规划MATLAB仿真程序是一种基于机器人路径规划技术的仿真程序。它包含传统A算法与改进A算法性能对比以及改进A算法融合DWA算法规避未知障碍物仿真。本文将对该程序进行详细的介绍和分析。
一、基础算法介绍
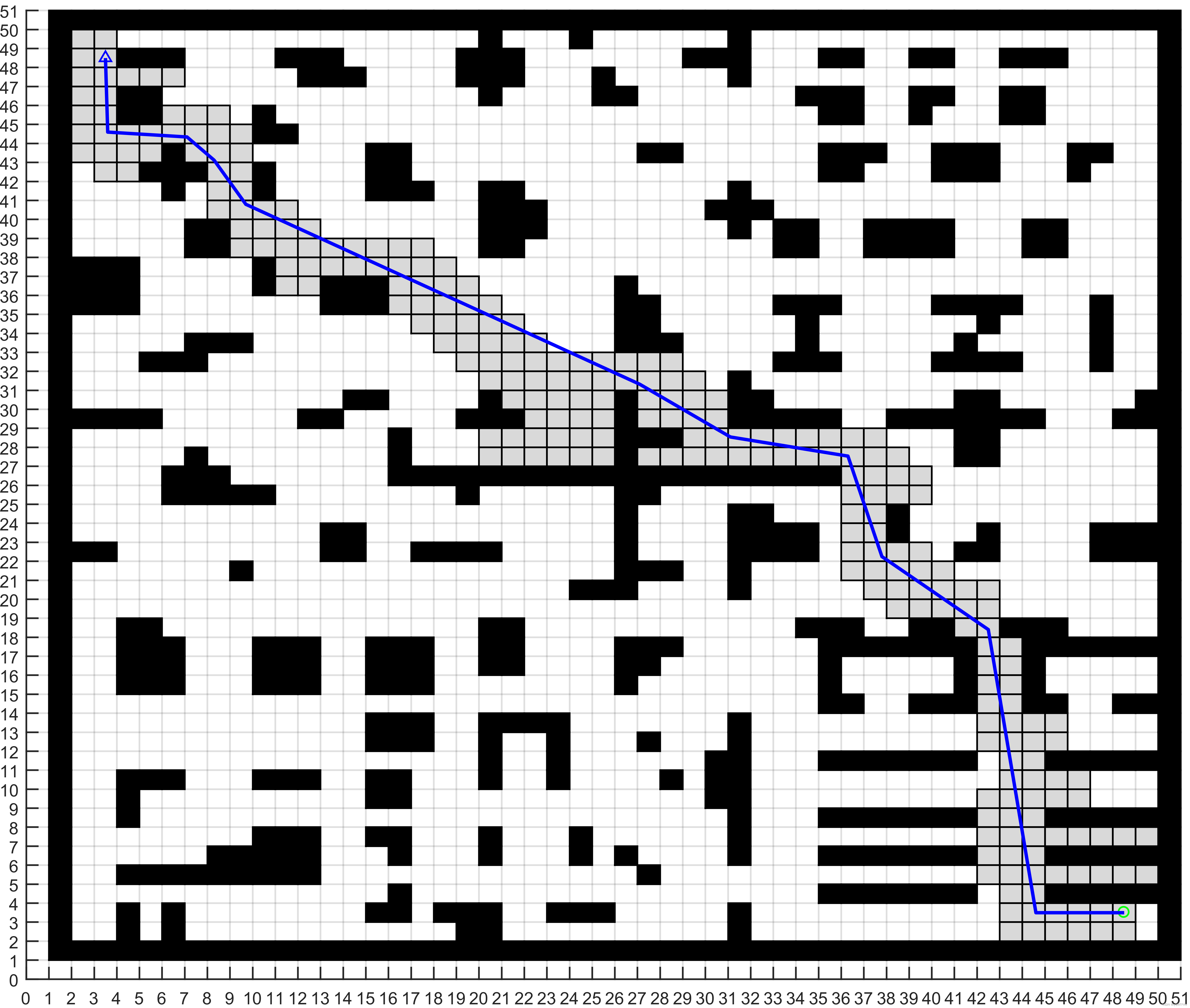
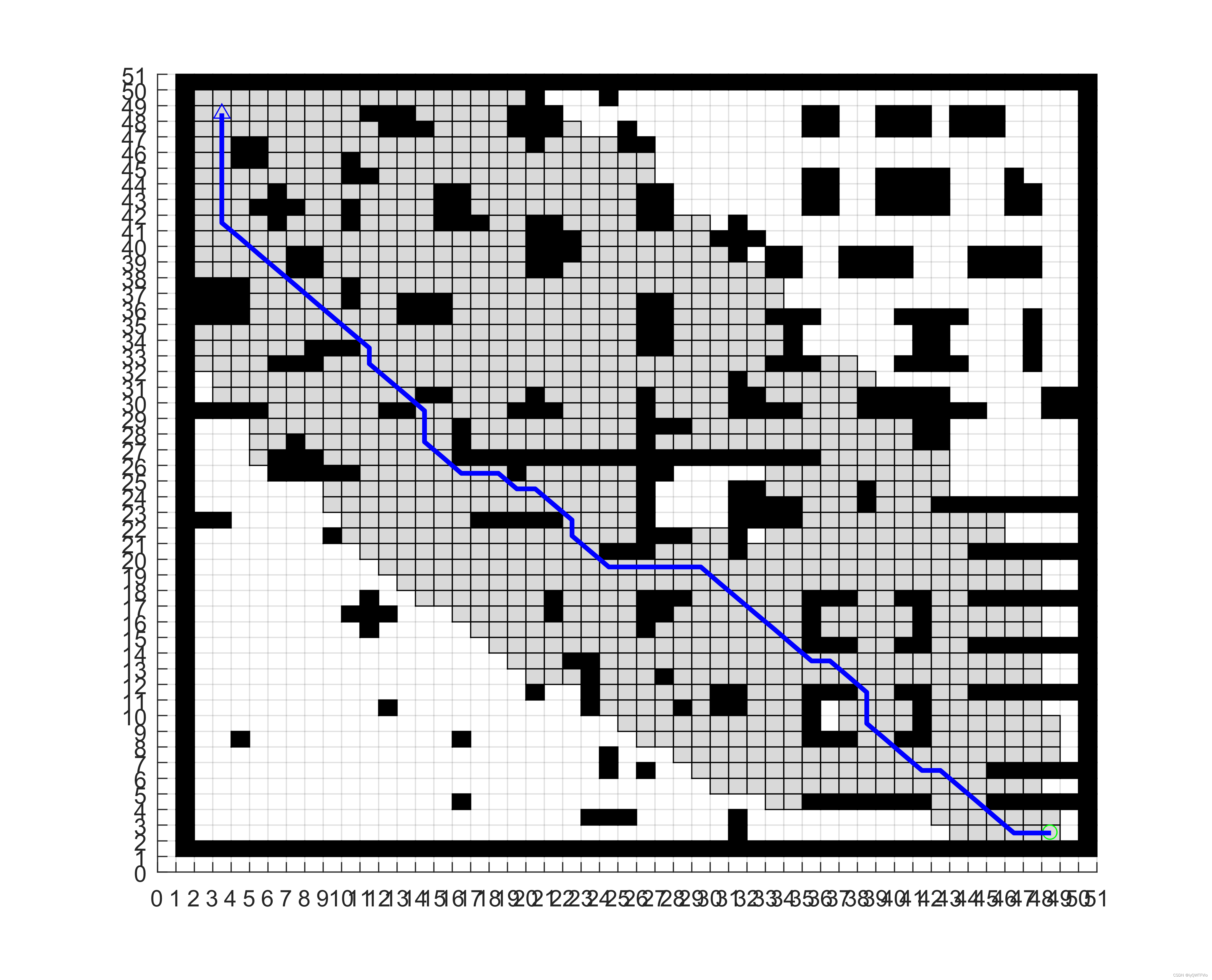
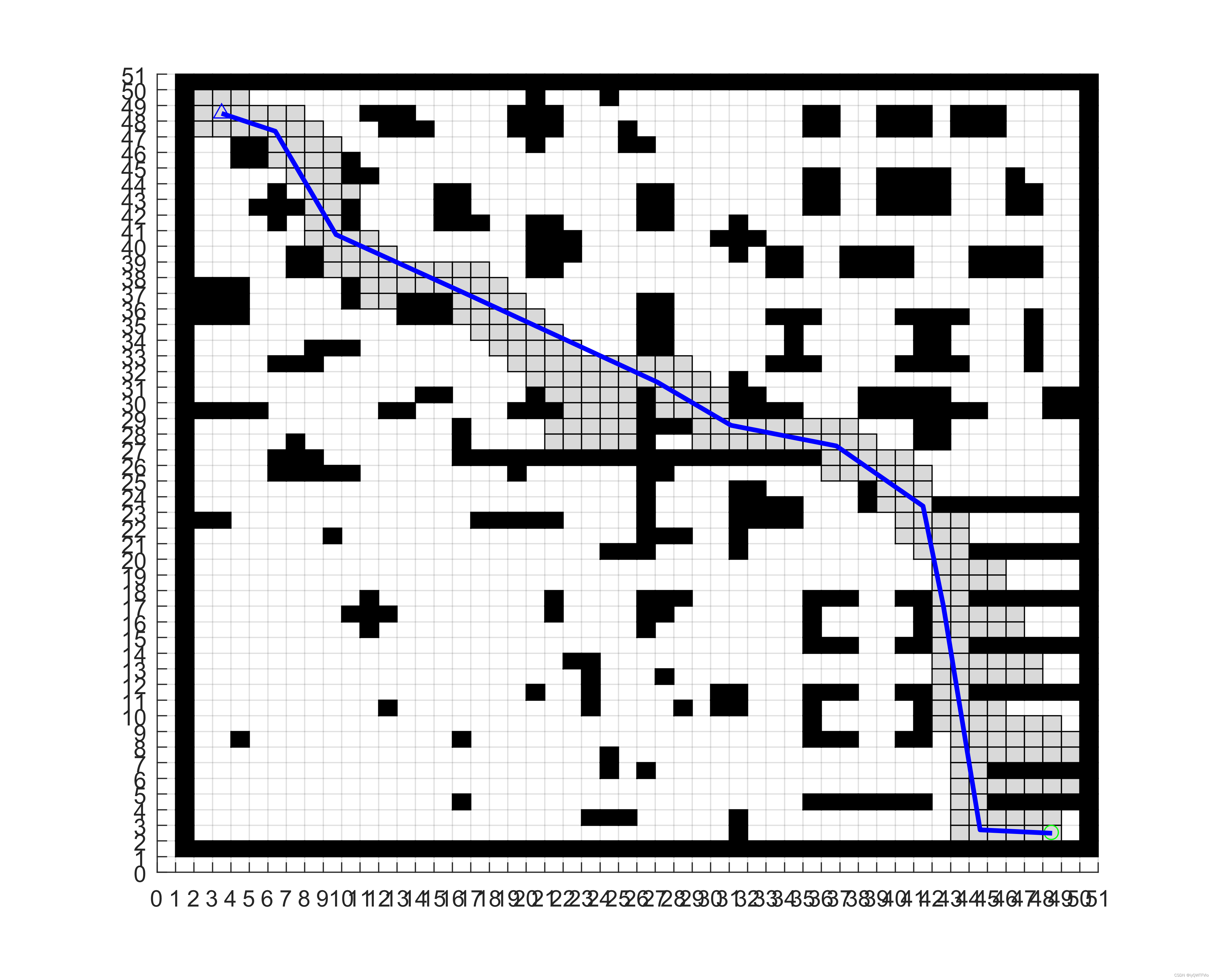
A*算法是一种广泛应用于路径规划方面的算法,该算法通过确定每一步的最佳选择来寻找一条到目标节点的最优路径。它将节点分为开启列表和关闭列表,在搜索过程中把搜索范围不断扩大,找到最优路径。
但是,传统的A算法存在一些问题,比如对于复杂的环境中存在的动态障碍物的处理方面不是很好,效率较低,搜索路径难以避免障碍物等问题。因此,为了解决这些问题,提出了改进A算法。
改进A算法在传统A算法的基础上,增加了一些创新的改进策略。它将搜索树分为核心树和边界树,通过对核心树和边界树的联合搜索,有效提高了搜索效率。同时,改进A*算法还使用曼哈顿距离代价函数,避免搜索路径难以避免障碍物等问题。
二、算法优化方案
为了进一步提高算法的性能,本文将改进A*算法与动态窗口算法(DWA)进行融合。DWA算法是一种利用机器人的传感器信息和动力学模型,在局部范围内规划机器人的路径,避开动态障碍物的算法。
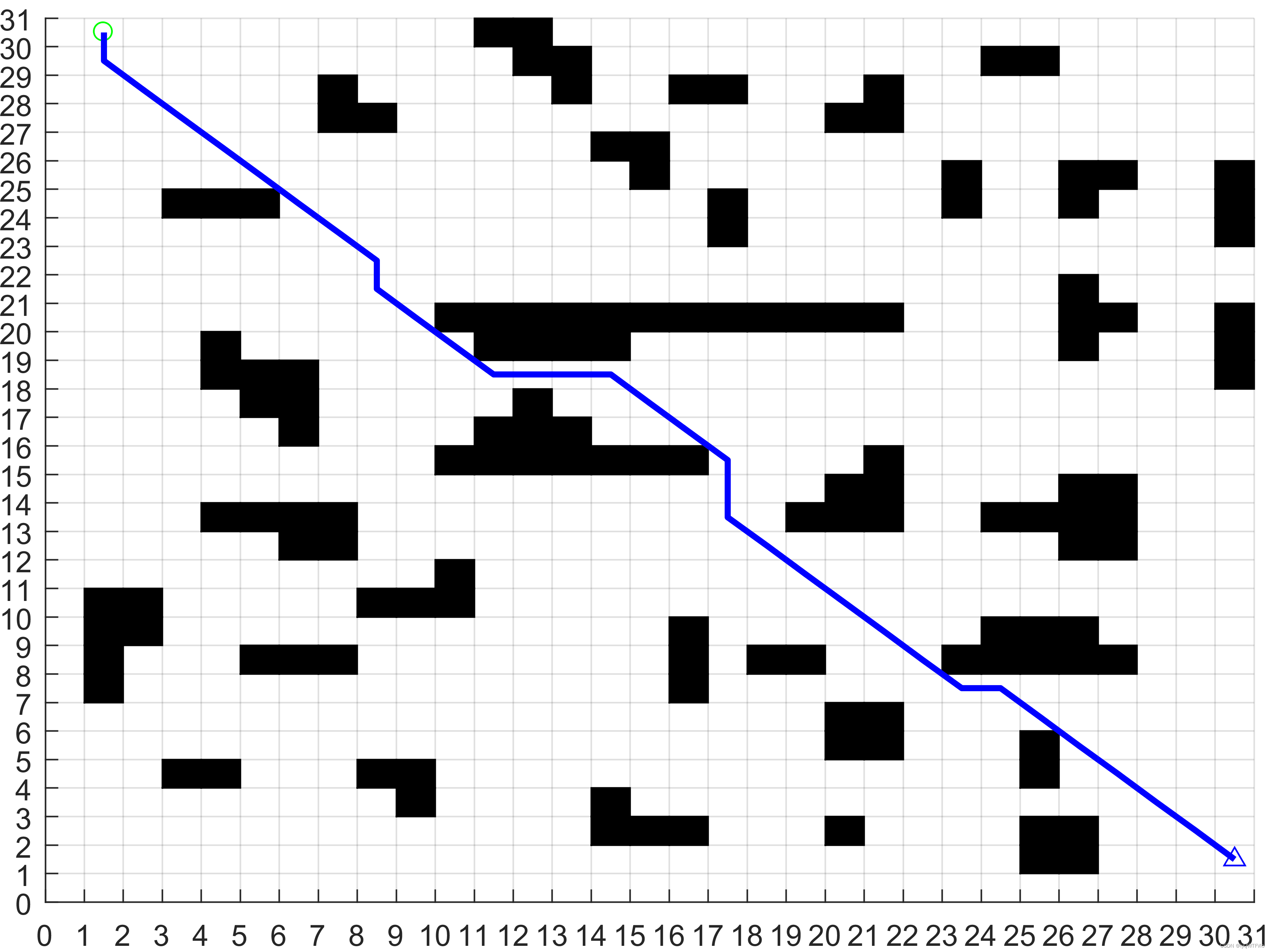
在本文提出的机器人路径规划仿真程序中,我们使用改进A*算法对全局路径进行规划,使用DWA算法对局部路径进行规划,实现了全局路径和局部路径的无缝连接。该算法不仅能够规避动态障碍物,还能与障碍物保持一定距离,提高了机器人的安全性和稳定性。
三、程序介绍
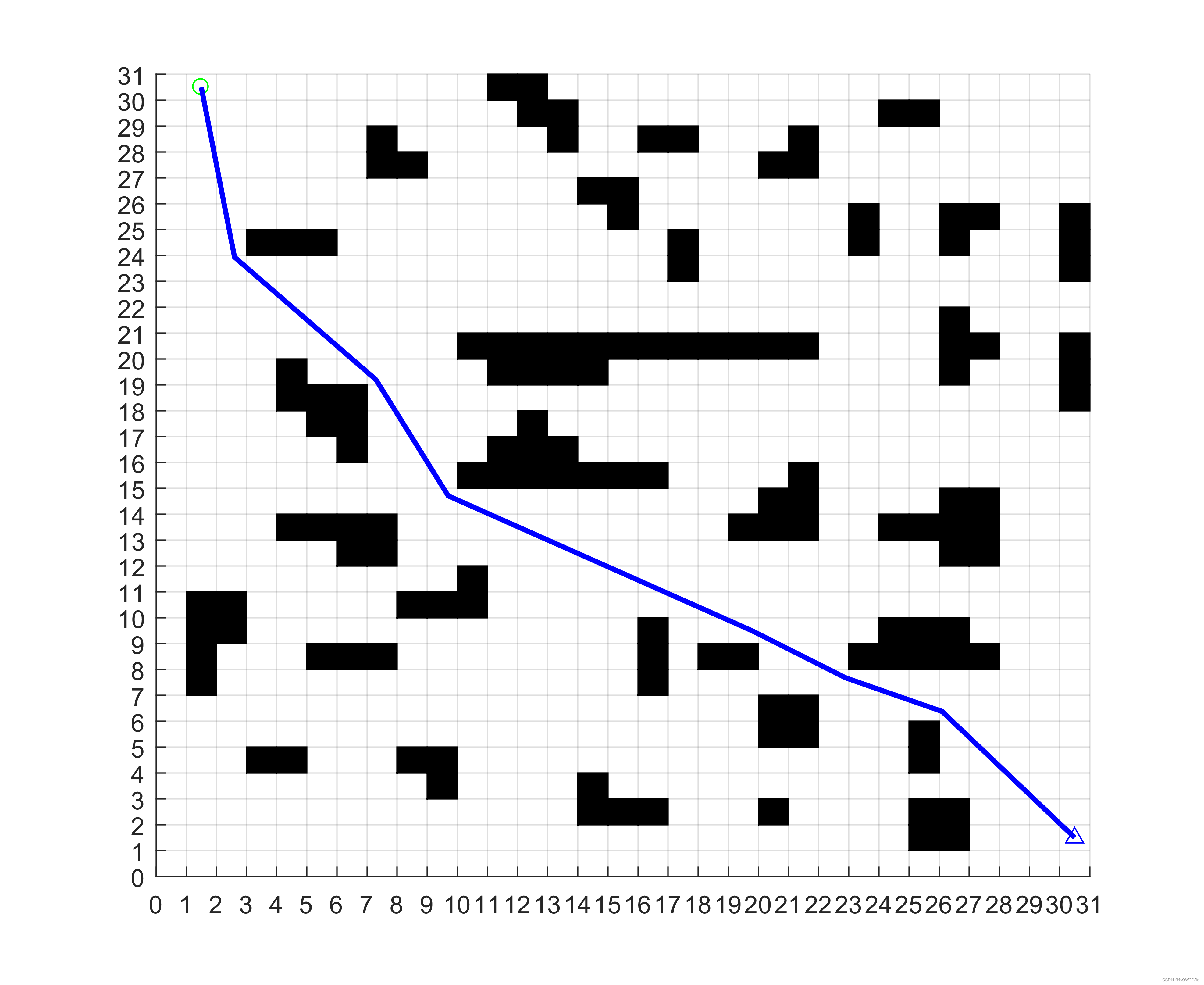
该程序能够任意设置起点与终点,根据不同的地图环境,进行地图的自主搭建和设置。同时,该程序还能够进行多种地图尺寸进行对比实验。除此之外,该程序中包含单个算法的仿真结果以及角速度线速度姿态位角的变化曲线,仿真图片丰富。运行该程序,可直接得到实验结果,便于使用和分析。
四、实验结果分析
通过改进A*算法融合DWA算法的机器人路径规划MATLAB仿真程序的实验,我们对算法的性能进行了评估,以下是实验结果的分析:
-
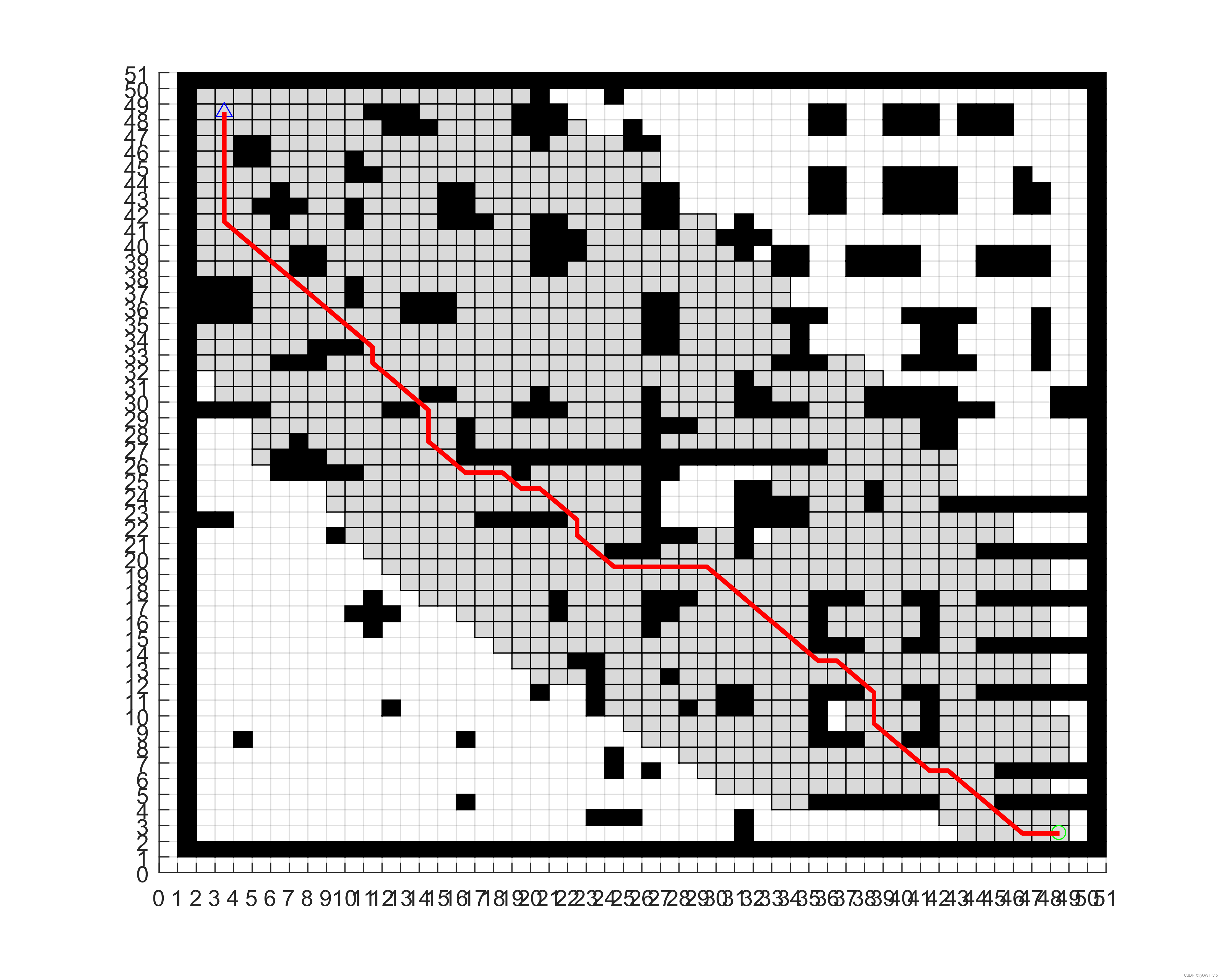
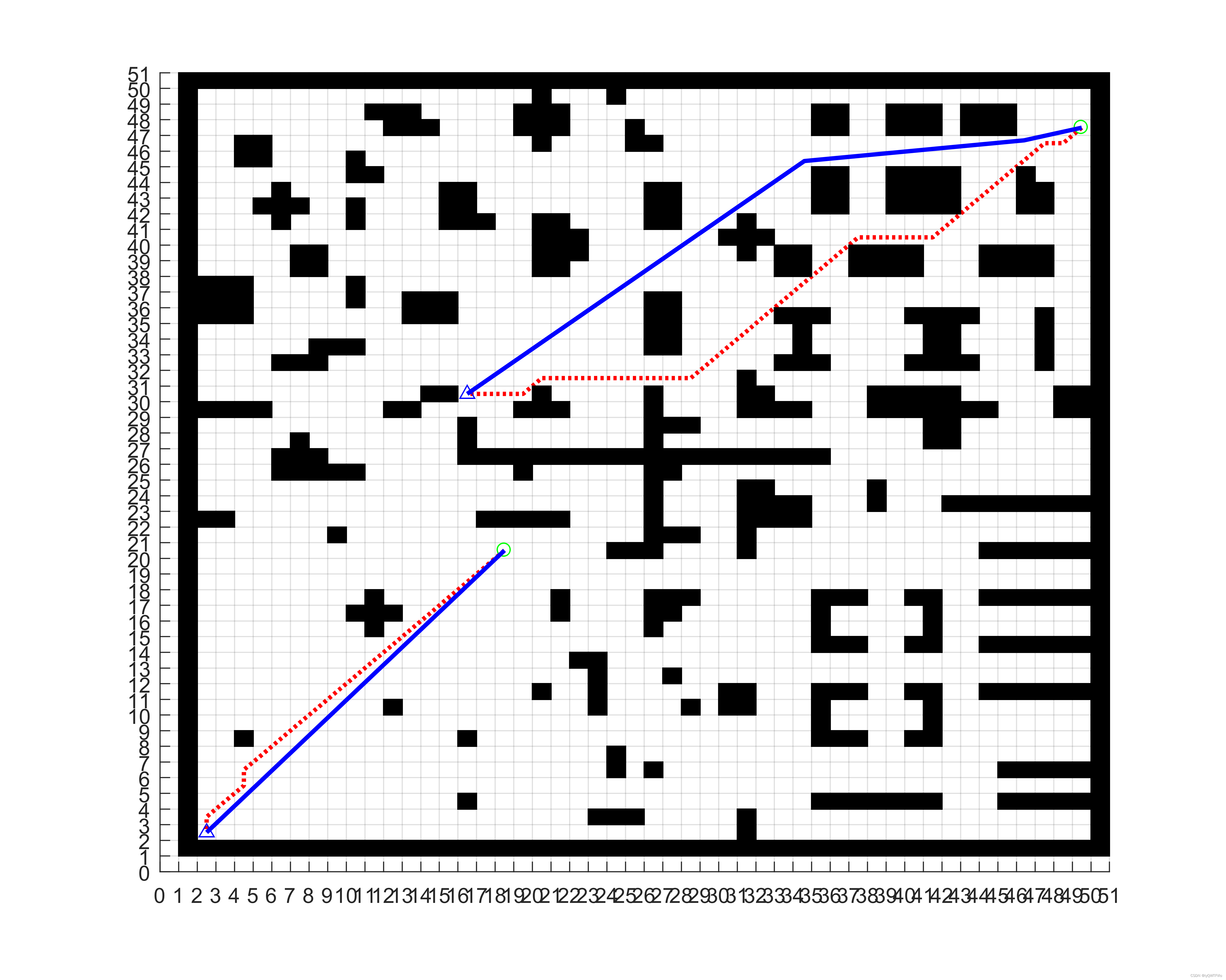
改进A算法的性能,相较于传统A算法,提高了搜索效率和路径规划的精度,可以更好的应对复杂环境中的路径规划问题。
-
改进A*算法融合DWA算法,能够更加精确的规避动态障碍物。与传统的DWA算法比较,本文提出的算法在规划路径的同时,能够与障碍物保持一定距离,增加了机器人的安全性和稳定性。
-
通过多种尺寸的地图进行对比实验,本文提出的算法在不同复杂度的地图环境下,都能够实现高效的路径规划。并且,在规避复杂障碍物时,算法能够保持较高的性能表现。
综上所述,本文提出了基于改进A*算法融合DWA算法的机器人路径规划MATLAB仿真程序。该程序在复杂环境下可以实现高效的路径规划,并且能够有效的规避动态障碍物,提高了机器人的安全性和稳定性。该算法在机器人路径规划技术领域具有广泛的应用前景。
相关代码,程序地址:http://lanzouw.top/751140814749.html














 1318
1318











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









