






matlab/simulink七自由度车辆模型,悬架具有主动控制力的七自由度整车模型。
输入为路面不平度,输出车轮位置,车身位移,俯仰角,侧倾角等。
参数可调。
需要matlab2016a及以上版本。
YID:9568697184135179
只想安安静静赚钱






探索七自由度车辆模型:主动悬架控制与路面不平度响应
在汽车工程中,车辆动力学模型是理解车辆运动特性和性能的重要工具。今天,我们将深入探讨一个具有七自由度的车辆模型,特别关注其悬架具有主动控制力的情况,并探讨它如何响应路面不平度。
一、模型简介
七自由度车辆模型,顾名思义,是指一个能够描述车辆七个运动方向的数学模型。在这个模型中,我们不仅关心车辆的直线运动和转向运动,还关注车辆的俯仰、侧倾、横摆等动态特性。特别地,当悬架具备主动控制力时,车辆的稳定性和舒适性将得到显著提升。
二、模型构建
在这个模型中,我们将重点关注车辆的动力学方程。以MATLAB Simulink为平台,我们将构建一个参数可调的模型。该模型将输入路面不平度,并输出车轮位置、车身位移、俯仰角、侧倾角等关键参数。
在Simulink中,我们将使用七自由度车辆模型的基本动力学方程。这些方程将包括车辆的平动和转动方程,以及悬架的动力学方程。在方程中,我们将特别关注悬架的主动控制力部分,这将是我们调整和优化的关键参数。
三、主动悬架控制力的应用
具有主动控制力的悬架能够实时感知路面状况和车辆状态,并据此调整悬架的刚度和阻尼,以优化车辆的行驶性能。在七自由度模型中,这种主动控制力将影响车辆的稳定性和乘坐舒适性。
例如,当车辆行驶在颠簸的路面上时,主动悬架能够迅速调整以减少车身的振动。这不仅可以提高乘客的舒适度,还可以保护车辆的关键部件免受过度振动的损害。
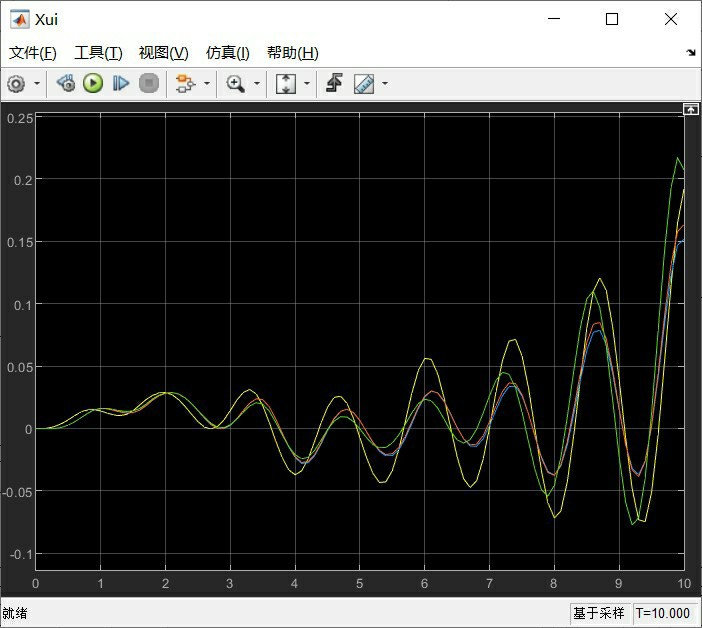
四、路面不平度与模型响应
模型的一个重要功能是能够准确预测车辆对路面不平度的响应。当输入不同的路面不平度时,模型将输出相应的车轮位置、车身位移以及俯仰角和侧倾角等数据。这些数据可以帮助我们了解车辆在不同路况下的运动特性。
五、参数可调性与MATLAB实现
该七自由度车辆模型的参数是可调的,这意味着我们可以根据不同的需求来调整模型的参数,以获得最优的仿真结果。这特别适合于汽车设计和研发阶段,以便快速验证和优化车辆的设计方案。
在MATLAB 2016a及以上版本中,我们可以使用Simulink工具箱来轻松地实现这个模型。通过编写S-Function或使用现成的模块库,我们可以轻松地构建出这个复杂的动力学模型。
六、示例代码片段
以下是一个简单的MATLAB代码片段,用于演示如何在Simulink中设置七自由度车辆模型的一个基本模块:
% 假设我们已经有了七自由度车辆模型的基本方程和参数
% 在Simulink中创建新模型
open_system('SevenDOFVehicleModel');
% 添加必要的模块,如路面不平度输入模块、动力学方程求解模块等
add_block('Input...'); % 添加路面不平度输入模块的代码将在这里填充
add_block('DynamicEquationSolver...'); % 添加动力学方程求解模块的代码...
% 连接模块并设置参数...(此处省略具体实现)
以上只是简要的代码片段和概念性描述。在实际的MATLAB Simulink环境中,模型的构建将更加复杂和详细。但通过这个简单的示例,我们可以看到如何在MATLAB中开始构建这样一个复杂的动力学模型。
七、结语
七自由度车辆模型是汽车工程中一个重要的研究领域。通过使用MATLAB Simulink平台,我们可以轻松地构建出这样一个复杂的模型,并对其进行仿真和分析。具有主动控制力的悬架是提高车辆性能的关键技术之一,而我们的模型将帮助工程师们更好地理解和优化这一技术。
详尽解读奉上: https://pan.baidu.com/s/1B83La87K3u-cXPHEjHkocw?pwd=1733
















 1018
1018

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









