







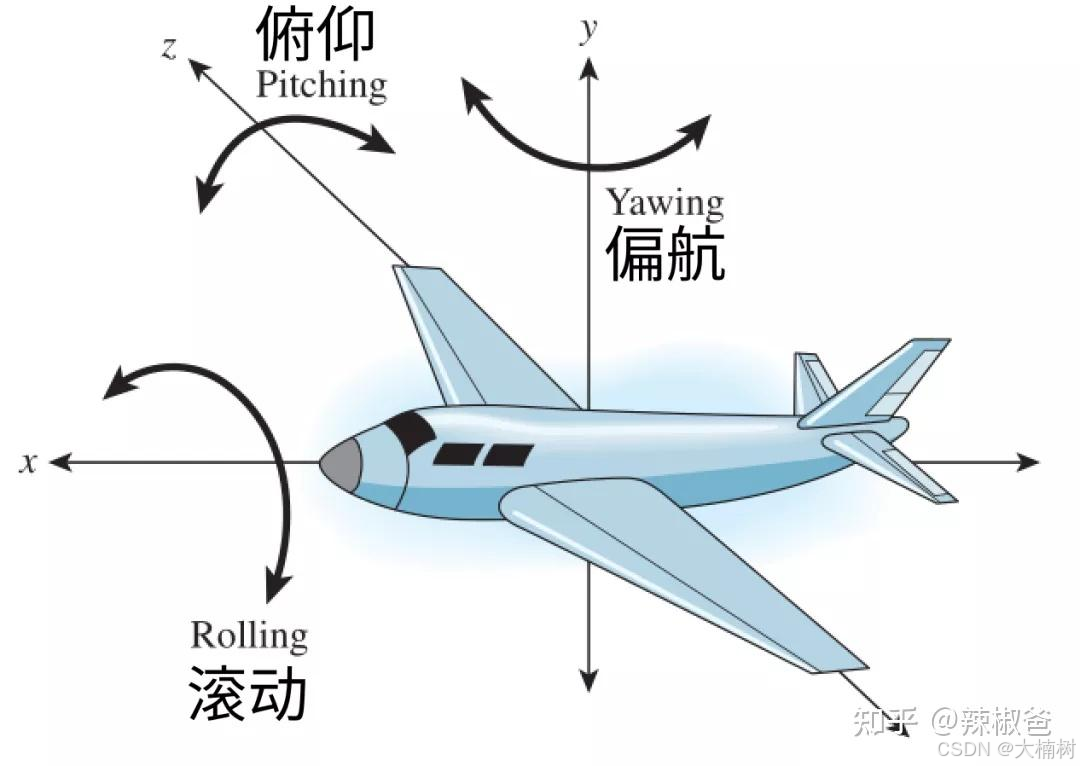
欧拉角是一种基于三种较简单旋转运动(称为俯仰、滚动和偏航)创建一般旋转的机制。如下图,一架沿x轴方向飞行的飞机可以通过 Yaw 转向左或转向右(偏航),Pitch 朝上飞或朝下飞(俯仰),或 Roll简单绕x轴旋转(滚动)来改变飞行方向。
感谢作者:
1.3. 欧拉角的常见问题
在使用欧拉角描述旋转时,需要注意以下问题:
万向锁(Gimbal Lock)
以常见的ZYX欧拉角为例,即首先绕全局z轴旋转,然后绕新的y轴旋转,最后绕新的x轴旋转。当第二次旋转(即绕y轴的旋转)旋转角(例如上例中的 θ \thetaθ)达到 ± 9 0 ∘ \pm90^\circ±90
∘
时。
第一次和第三次旋转将会围绕同一个轴。这意味着,在这些特殊的角度下,系统失去了一个自由度,因为两次旋转现在作用于相同的轴,不能独立地控制物体的方向。
多值性与奇异性
欧拉角存在多值性,即不同的角度组合可能表示相同的旋转。此外,某些角度组合可能使反求公式退化,导致奇异性问题,增加了数值计算的复杂性。


















 1852
1852

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











