







 该专栏为热销专栏榜 第32名
该专栏为热销专栏榜 第32名一、本文介绍
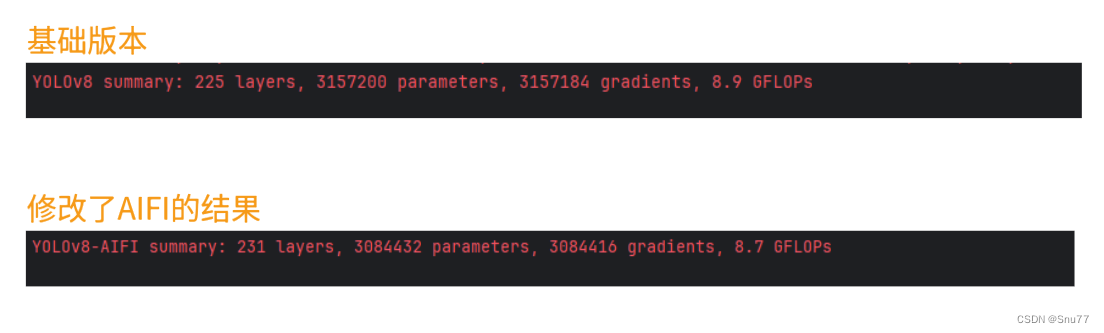
本文给大家带来是用最新的RT-DETR模型中的AIFI模块间去替换YOLOv10中的SPPF。RT-DETR号称是打败YOLO的检测模型,其作为一种基于Transformer的检测方法,相较于传统的基于卷积的检测方法,提供了更为全面和深入的特征理解,将RT-DETR中的一些先进模块融入到YOLOv10往往能够达到一些特殊的效果(我个人猜测,所以我进行了一些实验来验证这一点),我将RT-DETR的AIFI模块和Conv模块融合在一起添加到了YOLOv10中。亲测这一改进并不一定能够提高精度我用了三个数据集来试(没有涨点就是没有涨点,我不能够没有涨点还去告诉你涨点这样也耽误大家的时间),但为啥要发出来这个AIFI首先其能够达到轻量化模型的作用的,其次其能够和RT-DETR模型的其他模块融合可以达到好的效果。所以发出来想要给的是轻量化读者来使用的,因为发论文并不一定要提高精度轻量化模型也是一个方向。
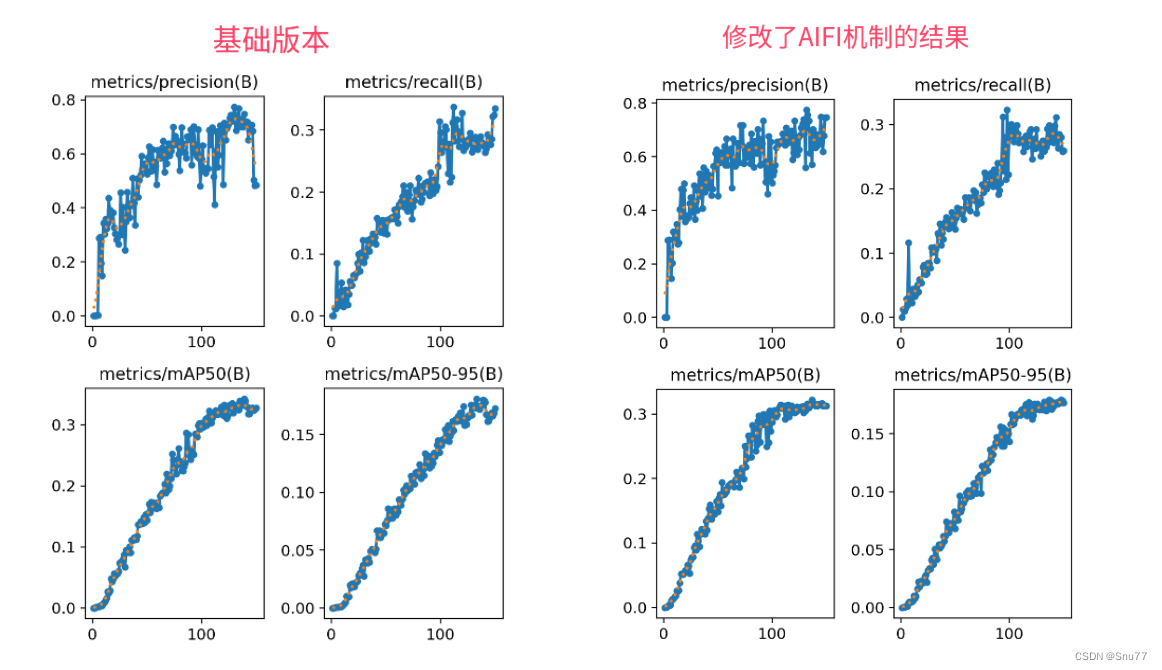
(我实测直接替换SPPF是有降点的在我测试的三个数据集,所以我参考了RT-DETR模型的网络结构在AIFI之后额外添加一个Conv模块)
参数量对比图如下->
目录

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 5986
5986

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











