







移动机器人自动充电的过程一般分为2个阶段,第一阶段是远程引导,第二阶段是近程对齐。
红外引导
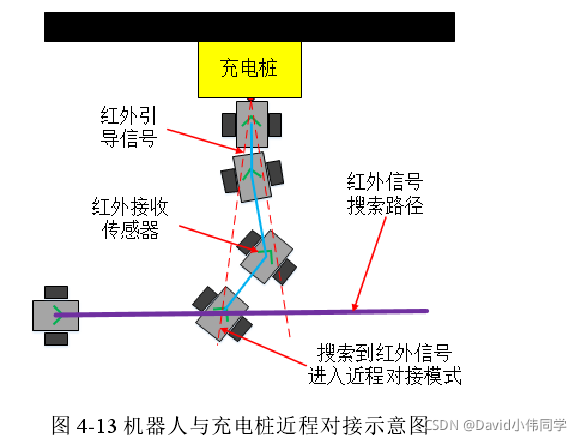
红外传感器的有效通信区域为3m 10°的扇形。需保证充电桩前方3m区域内没有障碍物
方案1
硕士论文《移动机器人运动控制与自主充电系统的研制》
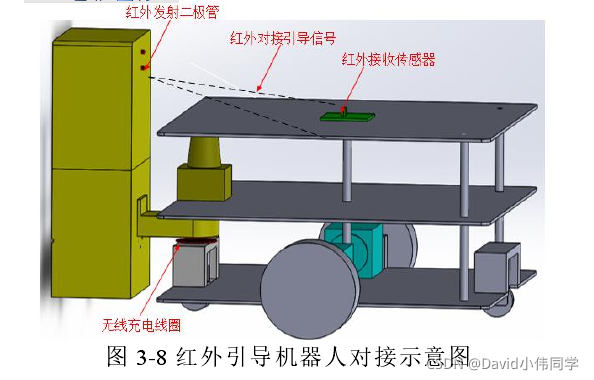

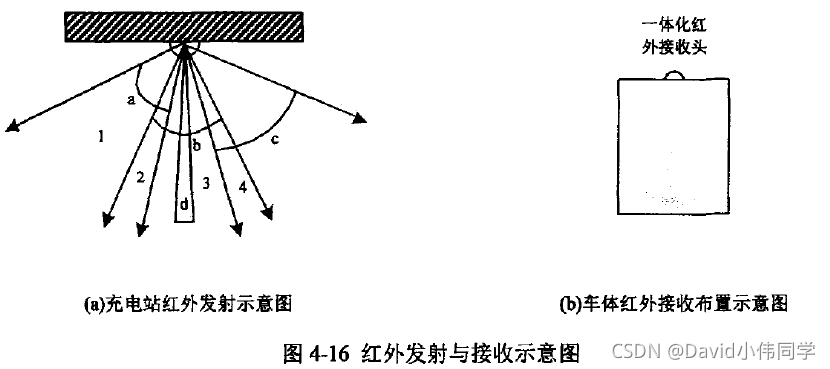
图a为充电桩内部的红外发射传感器的模型图,红外发射二极管发射波长为940nm,频率为38KHZ的红外脉冲信号,其覆盖范围为夹角10°、半径3m的窄扇形区域;图b为机器人内部的红外接收传感器模型,两个红外接收管各自能接收120°范围内的红外信号,将两个接收管夹角110°布置成一个接收阵列作为红外接收传感器。
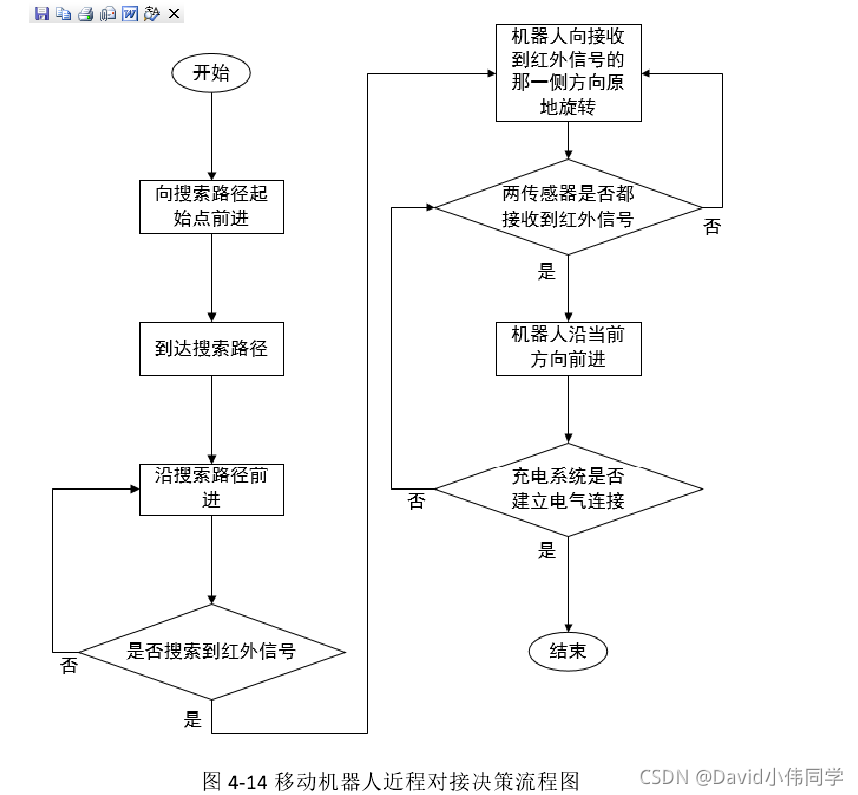
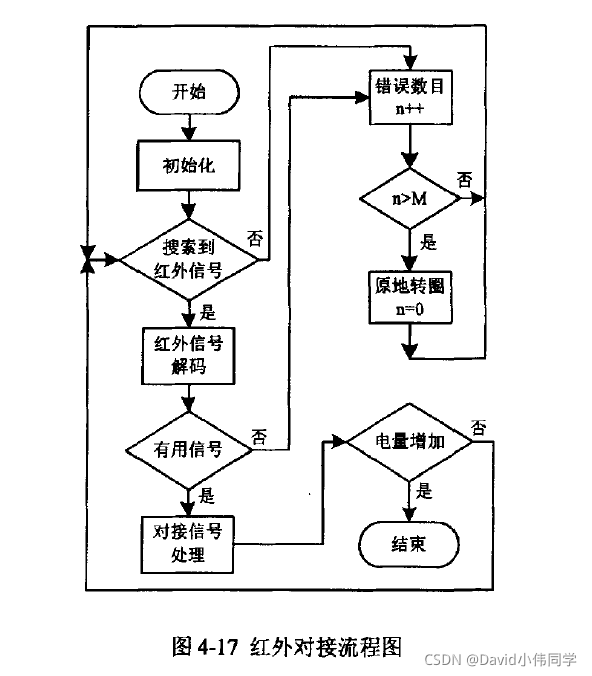
机器人内部的红外接收传感器反馈的信息为是否接收到红外信号的开关量信号,机器人根据此反馈信息调整姿态完成对接
由上表数据可知,机器人与充电桩的对接误差都在2cm以内,而当误差在5cm以内时,能建立可靠的电气连接。在对接完成后机器人的中轴线与充电桩的中轴线的夹角与红外发射信号的夹角有关,本课题所使用的红外发射二极管的信号夹角为10°,机器人与充电柱对接完成后的夹角也在10以内。因此,整个对接系统符合设计要求。
方案2
《公共场所智能清扫机器人研制—刘奎》
·为实现机器人自主充电的近程对接,充电站的红外布置及发射示意图如图(a)所示,一个远程红外发射模块安装在充电站正前方,另外两个远程发射模块则分别倾斜一定角度布置在充电站的左右方向,假定其各自发射信号分别标记为a、b和c相邻两发射模块其红外覆盖区域各有重叠,使得充电站前方大部分区域可被引导信号覆盖,红外覆盖区域按接收信号不同可分为图中的1、2、3、4、5等区域。此外,为实现更精准的导航对接,将近程红外发射模块也安装在充电站正前方,其信号标记为d覆盖范围为图中灰色三角形区域,为精准对接区域。红外接收装置安装在车体中部正前方位置,其示意图如图(b)所示。

方案3
[J]《基于红外和超声波的机器人自主充电系统设计 曾世藩》
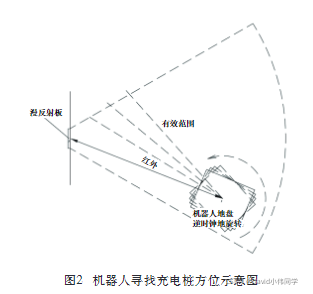
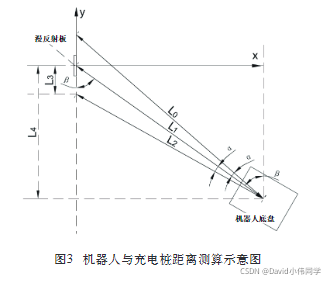
在充分考虑以上各种充电方式利弊的情况下,我们提出了一种基于红外线和超声波的更加简便、低成本的自主充电方式。这种充电方式只需在机器人机身上装载回归反射型红外线传感器(下称“红外传感器”)以及超声波测距传感器(下称“超声波传感器”),并在充电桩上安装一块漫反射板,既能实现自主充电对接功能,相对而言,在简易性和制造成本上具有显著的比较优势。
这个方案把红外发射器近似当成激光发射器 结果一般成功率为96%
视觉引导
方案1
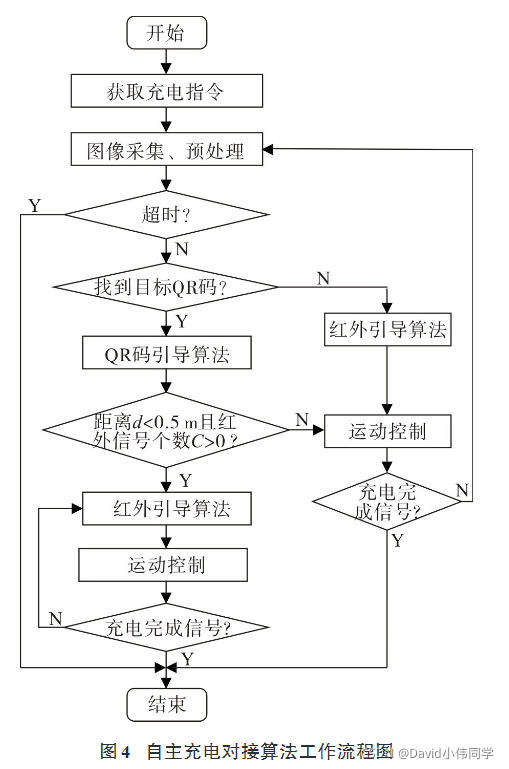
针对上述问题,文中结合视觉和红外信号来引导机器人完成与充电桩的对接任务。通过安装在机器人上的相机来识别标记充电桩快速响应( quick response,QR)码,快速获取机器人与QR码的相对位置,通过该位置信息,机器人将直接向充电桩移动。同时,为消除机器人在移动过程中丢失QR码以及距离QR码较近时无法获取完整图形带来的对定位信息的影响,利用红外接收器确定无法使用QR码定位时两者之间的相对角度,完成机器人的自主充电对接任务。
移动机器人通过相机精确定位到
Q
R
Q R
QR 码后, 需估计
Q
R
Q R
QR 码与机器人的相对位置。根据针孔成像模型原 理
(
12
]
^{(12]}
(12], 利用已经标定好的相机内参建立相机投影模型。假设
Q
R
\mathrm{QR}
QR 码中一点在世界坐标系下为
P
n
(
X
n
,
Y
w
,
Z
w
)
P_{n}\left(X_{n}, Y_{w}, Z_{w}\right)
Pn(Xn,Yw,Zw), 对应在像平面下的坐标点
p
e
(
u
,
v
)
p_{\mathrm{e}}(u, v)
pe(u,v), 则有:
Z
c
[
u
v
1
]
=
[
α
x
0
u
0
0
0
α
y
v
0
0
0
0
1
0
]
[
R
t
0
1
]
[
X
m
Y
w
Z
w
1
]
=
K
T
P
w
Z_{\mathrm{c}}\left[\begin{array}{c}u \\ v \\ 1\end{array}\right]=\left[\begin{array}{cccc}\alpha_{x} & 0 & u_{0} & 0 \\ 0 & \alpha_{y} & v_{0} & 0 \\ 0 & 0 & 1 & 0\end{array}\right]\left[\begin{array}{cc}\boldsymbol{R} & \boldsymbol{t} \\ 0 & 1\end{array}\right]\left[\begin{array}{c}X_{\mathrm{m}} \\ Y_{\mathrm{w}} \\ Z_{\mathrm{w}} \\ 1\end{array}\right]=\boldsymbol{K} \boldsymbol{T} P_{\mathrm{w}}
Zc⎣⎡uv1⎦⎤=⎣⎡αx000αy0u0v01000⎦⎤[R0t1]⎣⎢⎢⎡XmYwZw1⎦⎥⎥⎤=KTPw
式中:
K
K
K 为相机的内参矩阵;
R
R
R 为
3
×
3
3 \times 3
3×3 的旋转矩阵
;
t
; t
;t 为
3
×
1
3 \times 1
3×1 的平移列向量;
α
x
,
α
y
\alpha_{x}, \alpha_{y}
αx,αy 为相机内参;
T
T
T 为外参矩阵
在检测目标
Q
R
\mathrm{QR}
QR 码所在平面垂直于相机的光轴中心线时, 旋转矩阵
R
=
I
∘
R=I_{\circ}
R=I∘ 设
P
w
P_{w}
Pw 到相机的真实距离为
d
d
d, 平移列向量
t
=
[
0
,
0
,
d
]
T
\boldsymbol{t}=[0,0, d]^{\mathrm{T}}
t=[0,0,d]T, 则有:
Z
s
[
u
v
1
]
=
[
α
x
0
u
0
0
0
α
y
v
0
0
0
0
1
0
]
[
1
0
0
0
0
1
0
0
0
0
1
d
0
0
0
1
]
[
X
w
Y
m
Z
m
1
]
Z_{\mathrm{s}}\left[\begin{array}{c}u \\ v \\ 1\end{array}\right]=\left[\begin{array}{cccc}\alpha_{x} & 0 & u_{0} & 0 \\ 0 & \alpha_{y} & v_{0} & 0 \\ 0 & 0 & 1 & 0\end{array}\right]\left[\begin{array}{ccccc}1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & d \\ 0 & 0 & 0 & 1\end{array}\right]\left[\begin{array}{c}X_{\mathrm{w}} \\ Y_{\mathrm{m}} \\ Z_{\mathrm{m}} \\ 1\end{array}\right]
Zs⎣⎡uv1⎦⎤=⎣⎡αx000αy0u0v01000⎦⎤⎣⎢⎢⎡10000100001000d1⎦⎥⎥⎤⎣⎢⎢⎡XwYmZm1⎦⎥⎥⎤
将上式简化为:
[
u
v
1
]
=
1
d
[
α
x
X
w
+
u
0
d
α
y
X
w
+
v
0
d
d
]
\left[\begin{array}{l}u \\ v \\ 1\end{array}\right]=\frac{1}{d}\left[\begin{array}{c}\alpha_{x} X_{w}+u_{0} d \\ \alpha_{y} X_{w}+v_{0} d \\ d\end{array}\right]
⎣⎡uv1⎦⎤=d1⎣⎡αxXw+u0dαyXw+v0dd⎦⎤
通过面积分割可得
d
=
α
x
α
y
S
S
I
d=\sqrt{\alpha_{x} \alpha_{y} \frac{S}{S_{\mathrm{I}}}}
d=αxαySIS
式中:
S
S
S 为
Q
R
\mathrm{QR}
QR 码的实际测量面积;
S
1
S_{1}
S1 为图像平面中
Q
R
\mathrm{QR}
QR 码的面积;
α
x
\alpha_{x}
αx 与
α
y
\alpha_{y}
αy 均为相机内参;
d
d
d 为目标与相机光 心的实际距离。
确定
Q
R
\mathrm{QR}
QR 码与相机的距离
d
d
d 后, 可根据式(2)相机的投影模型确定两者的相对位姿, 该式可引入李代数
ζ
\zeta
ζ 表示相机的位姿矩阵
R
\boldsymbol{R}
R 和
t
t
t, 则
d
i
p
i
=
K
exp
(
ζ
A
)
P
i
d_{i} p_{i}=K \exp \left(\zeta^{A}\right) P_{i}
dipi=Kexp(ζA)Pi
为获取最优的相机位姿,使用光束平差法构建重投影误差, 并通过最小二乘法使得误差最小
ζ
∗
=
arg
min
ξ
1
2
∑
i
=
1
n
∥
p
i
−
1
d
i
K
exp
(
ζ
A
)
P
i
∥
2
2
\zeta^{*}=\arg \min _{\xi} \frac{1}{2} \sum_{i=1}^{n}\left\|p_{i}-\frac{1}{d_{i}} K \exp \left(\zeta^{A}\right) P_{i}\right\|_{2}^{2}
ζ∗=argminξ21∑i=1n∥∥∥pi−di1Kexp(ζA)Pi∥∥∥22
通过式(7)可获取机器人与QR码的相对位置。机器人在QR码的引导下不断调整自身位姿,逐渐向充电桩移动。
方案2
硕士论文《基于ROS系统的自主充电技术研究 谷yide》
专利《一种移动机器人自主充电对接装置 何瑜》
激光雷达引导
方案1
[1]魏银. 扫地机器人自动回充系统的设计与实现[D].中国科学技术大学,2018.
国内许多机器人就利用这个传感器,将充电座做一个特殊的处理,相当于贴上一个标签。通常将扫地机器人的充电座表面区分为高低不同的凹凸区域,凹区域的材质的光线反射率高,凸区域的材质的的光线吸收率高,激光雷达通过识别这个特别的区域进行回充。
方案2
《基于激光雷达的室内服务型机器人导航系统的设计与实现》陈莹
充电桩识别过程中,用于传感器识别的特殊形状物体(有规律的凹凸物体)放置在充电桩上方,机器人依据激光雷达测量得到的距离信息来识别充电桩的具体位姿,然后反复调整机器人自身相对充电桩的位置和角度,最后进行对接。
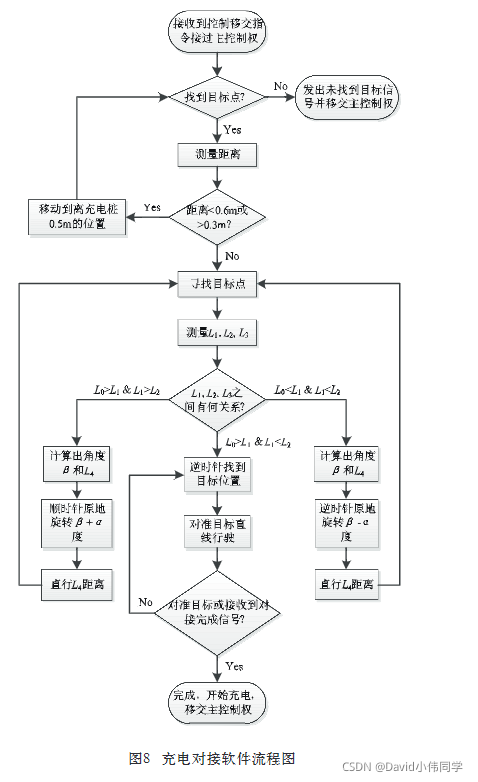
本文采用的是基于突变点检测的充电桩近程对接技术,根据激光测距仪对特殊形状的物体测距会呈现特殊的
距离突变规则来判断充电桩的精确位置。特殊形状物体如图5-4(a)所示。为保证实验过程中能精确地确定充电桩的位置,特殊形状物体的安装位置应与激光雷达在一个水平面上并且在垂直方向上与下方的充电桩中心对齐,具体安装方式如图5-4(b)所示。
方案3
《变电站巡检机器人自主充电装置及其对接控制研究 黎阳生》
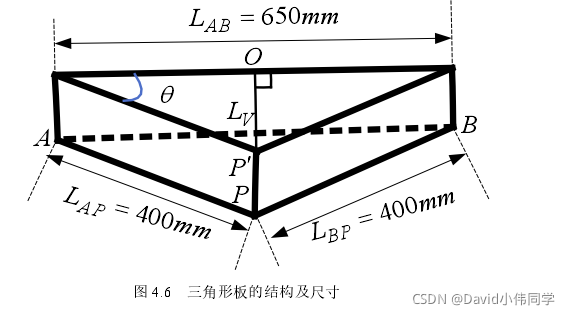
为利于激光检测充电座的位置,在充电座的正上方安置了等腰三角形物体用作辅助定位。该三角形板放置在充电座上方,其顶点与充电座插孔的中心的连线垂直于地面。该三角形板的尺寸如图46所示。
装位置的最高处离地面420mm,最低处为320mm,而机器人激光传感器的激光束的高度为370mm,这保证了激光束能完好地扫描三角形板。当激光传感器扫描到该三角形板上时,扫描数据所形成的三角形特征比较明显,如图47所示
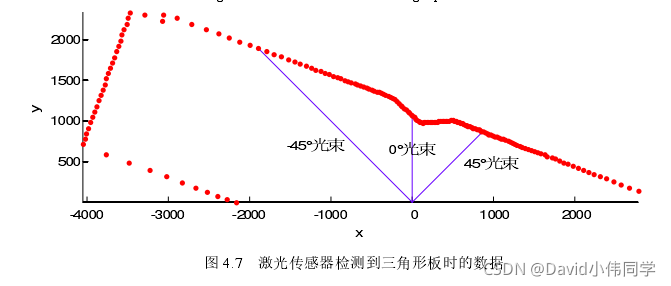
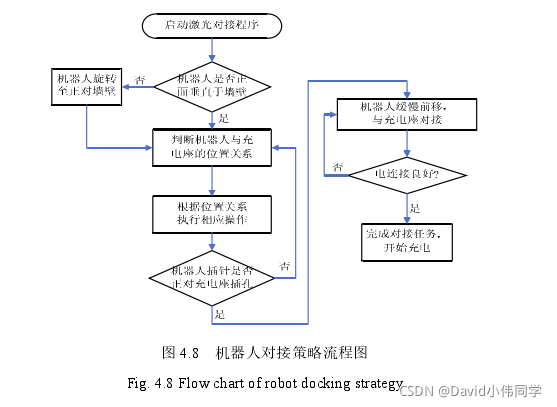
在对接过程中,机器人以机身位置为中心,采用激光测距法检测三角形顶点到机身的距离L以及机身中心士45°到墙壁的边长距离,根据边长距离的差值调整机器人杋身位置,并根据L的大小调整机身速度。机器人与充电座对接流程图所示。
商用机器人技术
科斯沃T8:,科沃斯T8的自动回充的方法------红外融合视觉传感器。融合的方法大概率是视觉传感器引导扫地机至中轴线,红外对准引导至充电座触发充电。
思岚室内扫地机器人:思岚的自主回充技术目前采用的是:激光雷达在行走的过程中“走”到充电桩附近后,可以通过高透面板扫描到内部的结构特征进行定位,(一般会扫描出“弓字形”),然后对上充电桩进行充电。可以让机器人认得自己的家,不会迷路。
蓝鲸智能: 充電樁會廣播一組紅外訊號,小車上的自動充電模塊有4個紅外接收器。通過分析這四個紅外接收器接收的紅外訊號,小車可以確定自己相對充電樁的位置,左右調整後可以完成準確定向對接。安裝在小車上的自動充電模塊有充電電壓、充電電流檢測功能,還有兩個碰撞檢測開關。
石头T7-Pro::利用激光和场区红外移动扫地机至中轴线,通过对准红外引导至充电座触发充电。这里扩展一下,双目可以测距,用于避障和AI识别。大概率是扫地机智能化的一个趋势。
小米: 红外引导 对准
云鲸:云鲸利用激光打在这三个条纹上,反射回激光接收器上的不同信号来识别充电座和对准充电座触点。这倒是很新颖,博主测试了回充效果也不错。其 顺便说一下,其清扫拖布是旋转的,这也是特别之处。
几个方案对比
| 方法 | 优点 | 缺点 |
|---|---|---|
| 单种红外传感器 | 成本较低,范围较广 ,易于开发 | 精度较差,受环境影响较大,回充效率较低 |
| 红外摄像头融合 | 精度较高,提高了回充的效率 | 开发难度较大,需要算力好的硬件支持,提高了成本 |
| 激光雷达传感器 | 探测范围较广,比较稳定 | 开发比较复杂,需要较好的硬件系统和算法支持 |
| 超声雷达 | 可以测量出具体的距离值,相对精确,成本较低,易于开发 | 方向性较差,易受环境影响(温度、湿度、障碍物等) |














 1514
1514











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









