




http://blog.sina.com.cn/s/blog_916b71bb0100w9al.html orb中文简介。
orb算法是brief算法的改进版,理论上可以实现旋转不变性,基本上可以实现尺度不变性(跟sift没有办法比)。orb的论文是:
ORB: an efficient alternative to SIFT or SURF忘记在哪里下载了,百度一下就ok了。
ORB是由opencv的作者之一写的,自然在opencv上也有实现,不过opencv上实现的和论文中实现有所不同(或许是我对论文的理解有错误)。本文分为两个部分,一部分是论文算法和opencv代码算法。
一:论文算法:
1.使用fast算法检测角点,使用harris算法的corner measure对检测出来的fast点进行精简。精简到规定的N个。
2.由于fast算法检测出来的特征点是没有方向的,所以论文作者使用intensity centroid的方法对特征点规定方向。公式见下:
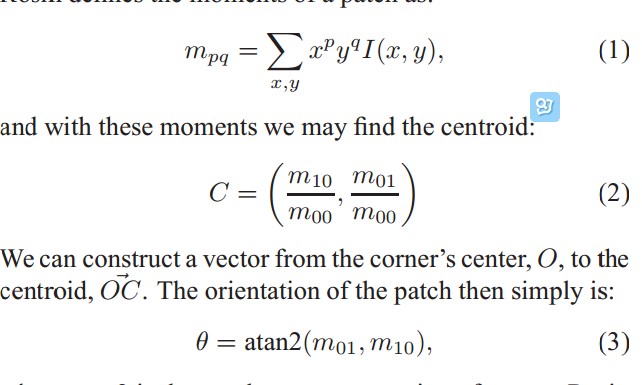
公式说明:公式(3)是使用c语言的写法写的,在一篇中文论文中给出了更加简洁的写法:

于是特征点有了方向。
3.对brief算法中使用的S矩阵改变为S(theta)矩阵(见下面的公式)特征描述子也有原来的fn变为了gn。
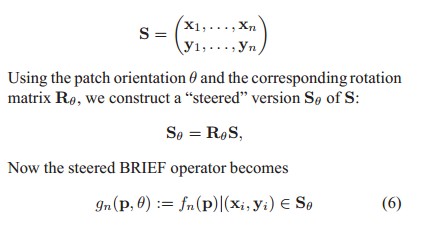
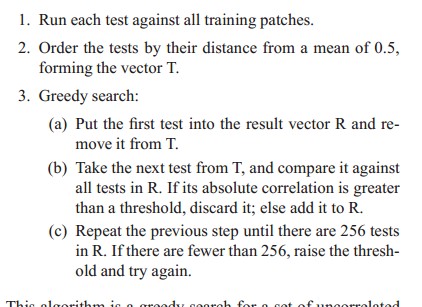
4.更改取点的方式,由于特征点有了方向性,所以相对brief算子来说mean值较大,需要换中方式来选取随机特征点。
采用暴力破解的方法来产生特征点位置:(没有看懂,还希望有人能翻译一下,不盛感激)。
5.根据brief算子的匹配算法来进行匹配。
完。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
二:代码的实现算法。
代码的实现相对论文来说有的地方简单,有的地方就要复杂的多。
1.根据scaleFactor这个参数来产生图像金字塔,实现的时候采用opencv的resize函数实现。
2.计算每层图像金字塔的特征点的位置和方向,函数是computeKeyPoints()。方法与前文提到的论文的2步骤相同。
3.计算每层图像金字塔中的每个特征点的patch。
带有注释的orb算法的代码见下面。a。首先对图像进行高斯模糊
b。根据特征点的角度、特征点的位置、已经获得表(pattern)来采样,获得采样点的灰度值。表是指:代码中的bit_pattern_31_这个量。(和论文算法一样,这个表我也没有看懂,希望有牛人能够指点。)
c。根据brief论文中的公式计算特征描述子。
完。。。。。。。。。。
三:比较.
通过比较可以发现最大的不同在于论文中使用了高斯金字塔进行模拟尺度变换。但同样在运行时增加了运算量和运算时间。
opencv的orb算法如何使用:
以下代码摘自:http://blog.csdn.net/merlin_q/article/details/7026375
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include<opencv2/legacy/legacy.hpp>
#include <iostream>
#include <vector>
#include<windows.h>
using namespace cv;
using namespace std;
int main()
{
Mat img_1 = imread("hello.jpg");
Mat img_2 = imread("hello2.jpg");
if (!img_1.data || !img_2.data)
{
cout << "error reading images " << endl;
return -1;
}
ORB orb;
vector<KeyPoint> keyPoints_1, keyPoints_2;
Mat descriptors_1, descriptors_2;
double start = GetTickCount();
orb(img_1, Mat(), keyPoints_1, descriptors_1);
orb(img_2, Mat(), keyPoints_2, descriptors_2);
BruteForceMatcher<HammingLUT> matcher;
vector<DMatch> matches;
matcher.match(descriptors_1, descriptors_2, matches);
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_1.rows; i++ )
{
double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
//printf("-- Max dist : %f \n", max_dist );
//printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 0.6*max_dist )
//-- PS.- radiusMatch can also be used here.
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_1.rows; i++ )
{
if( matches[i].distance < 0.6*max_dist )
{
good_matches.push_back( matches[i]);
}
}
double end = GetTickCount();
cout<<end-start<<endl;
Mat img_matches;
drawMatches(img_1, keyPoints_1, img_2, keyPoints_2,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
imshow( "Match", img_matches);
cvWaitKey();
return 0;
} orb算法的opencv代码:
#include "precomp.hpp"
#include <iterator>
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
namespace cv
{
const float HARRIS_K = 0.04f;
const int DESCRIPTOR_SIZE = 32;
/**
* Function that computes the Harris responses in a
* blockSize x blockSize patch at given points in an image
*/
static void
HarrisResponses(const Mat& img, vector<KeyPoint>& pts, int blockSize, float harris_k)
{
CV_Assert( img.type() == CV_8UC1 && blockSize*blockSize <= 2048 );
size_t ptidx, ptsize = pts.size();
const uchar* ptr00 = img.ptr<uchar>();
int step = (int)(img.step/img.elemSize1());
int r = blockSize/2;
float scale = (1 << 2) * blockSize * 255.0f;
scale = 1.0f / scale;
float scale_sq_sq = scale * scale * scale * scale;
AutoBuffer<int> ofsbuf(blockSize*blockSize);
int* ofs = ofsbuf;
for( int i = 0; i < blockSize; i++ )
for( int j = 0; j < blockSize; j++ )
ofs[i*blockSize + j] = (int)(i*step + j);
for( ptidx = 0; ptidx < ptsize; ptidx++ )
{
int x0 = cvRound(pts[ptidx].pt.x - r);
int y0 = cvRound(pts[ptidx].pt.y - r);
const uchar* ptr0 = ptr00 + y0*step + x0;
int a = 0, b = 0, c = 0;
for( int k = 0; k < blockSize*blockSize; k++ )
{
const uchar* ptr = ptr0 + ofs[k];
int Ix = (ptr[1] - ptr[-1])*2 + (ptr[-step+1] - ptr[-step-1]) + (ptr[step+1] - ptr[step-1]);
int Iy = (ptr[step] - ptr[-step])*2 + (ptr[step-1] - ptr[-step-1]) + (ptr[step+1] - ptr[-step+1]);
a += Ix*Ix;
b += Iy*Iy;
c += Ix*Iy;
}
pts[ptidx].response = ((float)a * b - (float)c * c -
harris_k * ((float)a + b) * ((float)a + b))*scale_sq_sq;
}
}
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//得到特征点的角度。
static float IC_Angle(const Mat& image, const int half_k, Point2f pt,
const vector<int> & u_max)
{
int m_01 = 0, m_10 = 0;
const uchar* center = &image.at<uchar> (cvRound(pt.y), cvRound(pt.x));
// Treat the center line differently, v=0
for (int u = -half_k; u <= half_k; ++u)
m_10 += u * center[u];
// Go line by line in the circular patch
int step = (int)image.step1();
for (int v = 1; v <= half_k; ++v)
{
// Proceed over the two lines
int v_sum = 0;
int d = u_max[v];
for (int u = -d; u <= d; ++u)
{
int val_plus = center[u + v*step], val_minus = center[u - v*step];
v_sum += (val_plus - val_minus);
m_10 += u * (val_plus + val_minus);
}
m_01 += v * v_sum;
}
return fastAtan2((float)m_01, (float)m_10);
}
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//获得一个特征点的特征描述子。
static void computeOrbDescriptor(const KeyPoint& kpt,
const Mat& img, const Point* pattern,
uchar* desc, int dsize, int WTA_K)
{
float angle = kpt.angle;//获得角度。
//angle = cvFloor(angle/12)*12.f;
angle *= (float)(CV_PI/180.f);
float a = (float)cos(angle), b = (float)sin(angle);//a为cos,b为sin
const uchar* center = &img.at<uchar>(cvRound(kpt.pt.y), cvRound(kpt.pt.x));//获得特征点的中心点。
int step = (int)img.step;//获得step
#if 1//下面的define是根据特征点的角度、特征点的位置、已经获得表(pattern)来采样,获得采样点的灰度值。
#define GET_VALUE(idx) \
center[cvRound(pattern[idx].x*b + pattern[idx].y*a)*step + \
cvRound(pattern[idx].x*a - pattern[idx].y*b)]
#else
float x, y;
int ix, iy;
#define GET_VALUE(idx) \
(x = pattern[idx].x*a - pattern[idx].y*b, \
y = pattern[idx].x*b + pattern[idx].y*a, \
ix = cvFloor(x), iy = cvFloor(y), \
x -= ix, y -= iy, \
cvRound(center[iy*step + ix]*(1-x)*(1-y) + center[(iy+1)*step + ix]*(1-x)*y + \
center[iy*step + ix+1]*x*(1-y) + center[(iy+1)*step + ix+1]*x*y))
#endif
if( WTA_K == 2 )
{
for (int i = 0; i < dsize; ++i, pattern += 16)
{
int t0, t1, val;
t0 = GET_VALUE(0); t1 = GET_VALUE(1);
val = t0 < t1;//根据brief的tao公式来计算,详见brief论文的公式(1) 。
t0 = GET_VALUE(2); t1 = GET_VALUE(3);
val |= (t0 < t1) << 1;
t0 = GET_VALUE(4); t1 = GET_VALUE(5);
val |= (t0 < t1) << 2;
t0 = GET_VALUE(6); t1 = GET_VALUE(7);
val |= (t0 < t1) << 3;
t0 = GET_VALUE(8); t1 = GET_VALUE(9);
val |= (t0 < t1) << 4;
t0 = GET_VALUE(10); t1 = GET_VALUE(11);
val |= (t0 < t1) << 5;
t0 = GET_VALUE(12); t1 = GET_VALUE(13);
val |= (t0 < t1) << 6;
t0 = GET_VALUE(14); t1 = GET_VALUE(15);
val |= (t0 < t1) << 7;
desc[i] = (uchar)val;
}
}
else if( WTA_K == 3 )
{
for (int i = 0; i < dsize; ++i, pattern += 12)
{
int t0, t1, t2, val;
t0 = GET_VALUE(0); t1 = GET_VALUE(1); t2 = GET_VALUE(2);
val = t2 > t1 ? (t2 > t0 ? 2 : 0) : (t1 > t0);
t0 = GET_VALUE(3); t1 = GET_VALUE(4); t2 = GET_VALUE(5);
val |= (t2 > t1 ? (t2 > t0 ? 2 : 0) : (t1 > t0)) << 2;
t0 = GET_VALUE(6); t1 = GET_VALUE(7); t2 = GET_VALUE(8);
val |= (t2 > t1 ? (t2 > t0 ? 2 : 0) : (t1 > t0)) << 4;
t0 = GET_VALUE(9); t1 = GET_VALUE(10); t2 = GET_VALUE(11);
val |= (t2 > t1 ? (t2 > t0 ? 2 : 0) : (t1 > t0)) << 6;
desc[i] = (uchar)val;//把获得的brief特征通过desc返回。
}
}
else if( WTA_K == 4 )
{
for (int i = 0; i < dsize; ++i, pattern += 16)
{
int t0, t1, t2, t3, u, v, k, val;
t0 = GET_VALUE(0); t1 = GET_VALUE(1);
t2 = GET_VALUE(2); t3 = GET_VALUE(3);
u = 0, v = 2;
if( t1 > t0 ) t0 = t1, u = 1;
if( t3 > t2 ) t2 = t3, v = 3;
k = t0 > t2 ? u : v;
val = k;
t0 = GET_VALUE(4); t1 = GET_VALUE(5);
t2 = GET_VALUE(6); t3 = GET_VALUE(7);
u = 0, v = 2;
if( t1 > t0 ) t0 = t1, u = 1;
if( t3 > t2 ) t2 = t3, v = 3;
k = t0 > t2 ? u : v;
val |= k << 2;
t0 = GET_VALUE(8); t1 = GET_VALUE(9);
t2 = GET_VALUE(10); t3 = GET_VALUE(11);
u = 0, v = 2;
if( t1 > t0 ) t0 = t1, u = 1;
if( t3 > t2 ) t2 = t3, v = 3;
k = t0 > t2 ? u : v;
val |= k << 4;
t0 = GET_VALUE(12); t1 = GET_VALUE(13);
t2 = GET_VALUE(14); t3 = GET_VALUE(15);
u = 0, v = 2;
if( t1 > t0 ) t0 = t1, u = 1;
if( t3 > t2 ) t2 = t3, v = 3;
k = t0 > t2 ? u : v;
val |= k << 6;
desc[i] = (uchar)val;
}
}
else
CV_Error( CV_StsBadSize, "Wrong WTA_K. It can be only 2, 3 or 4." );
#undef GET_VALUE
}
static void initializeOrbPattern( const Point* pattern0, vector<Point>& pattern, int ntuples, int tupleSize, int poolSize )
{
RNG rng(0x12345678);
int i, k, k1;
pattern.resize(ntuples*tupleSize);
for( i = 0; i < ntuples; i++ )
{
for( k = 0; k < tupleSize; k++ )
{
for(;;)
{
int idx = rng.uniform(0, poolSize);
Point pt = pattern0[idx];
for( k1 = 0; k1 < k; k1++ )
if( pattern[tupleSize*i + k1] == pt )
break;
if( k1 == k )
{
pattern[tupleSize*i + k] = pt;
break;
}
}
}
}
}
static int bit_pattern_31_[256*4] =//为看懂这是怎么回事。
{
8,-3, 9,5/*mean (0), correlation (0)*/,
4,2, 7,-12/*mean (1.12461e-05), correlation (0.0437584)*/,
-11,9, -8,2/*mean (3.37382e-05), correlation (0.0617409)*/,
7,-12, 12,-13/*mean (5.62303e-05), correlation (0.0636977)*/,
2,-13, 2,12/*mean (0.000134953), correlation (0.085099)*/,
1,-7, 1,6/*mean (0.000528565), correlation (0.0857175)*/,
-2,-10, -2,-4/*mean (0.0188821), correlation (0.0985774)*/,
-13,-13, -11,-8/*mean (0.0363135), correlation (0.0899616)*/,
-13,-3, -12,-9/*mean (0.121806), correlation (0.099849)*/,
10,4, 11,9/*mean (0.122065), correlation (0.093285)*/,
-13,-8, -8,-9/*mean (0.162787), correlation (0.0942748)*/,
-11,7, -9,12/*mean (0.21561), correlation (0.0974438)*/,
7,7, 12,6/*mean (0.160583), correlation (0.130064)*/,
-4,-5, -3,0/*mean (0.228171), correlation (0.132998)*/,
-13,2, -12,-3/*mean (0.00997526), correlation (0.145926)*/,
-9,0, -7,5/*mean (0.198234), correlation (0.143636)*/,
12,-6, 12,-1/*mean (0.0676226), correlation (0.16689)*/,
-3,6, -2,12/*mean (0.166847), correlation (0.171682)*/,
-6,-13, -4,-8/*mean (0.101215), correlation (0.179716)*/,
11,-13, 12,-8/*mean (0.200641), correlation (0.192279)*/,
4,7, 5,1/*mean (0.205106), correlation (0.186848)*/,
5,-3, 10,-3/*mean (0.234908), correlation (0.192319)*/,
3,-7, 6,12/*mean (0.0709964), correlation (0.210872)*/,
-8,-7, -6,-2/*mean (0.0939834), correlation (0.212589)*/,
-2,11, -1,-10/*mean (0.127778), correlation (0.20866)*/,
-13,12, -8,10/*mean (0.14783), correlation (0.206356)*/,
-7,3, -5,-3/*mean (0.182141), correlation (0.198942)*/,
-4,2, -3,7/*mean (0.188237), correlation (0.21384)*/,
-10,-12, -6,11/*mean (0.14865), correlation (0.23571)*/,
5,-12, 6,-7/*mean (0.222312), correlation (0.23324)*/,
5,-6, 7,-1/*mean (0.229082), correlation (0.23389)*/,
1,0, 4,-5/*mean (0.241577), correlation (0.215286)*/,
9,11, 11,-13/*mean (0.00338507), correlation (0.251373)*/,
4,7, 4,12/*mean (0.131005), correlation (0.257622)*/,
2,-1, 4,4/*mean (0.152755), correlation (0.255205)*/,
-4,-12, -2,7/*mean (0.182771), correlation (0.244867)*/,
-8,-5, -7,-10/*mean (0.186898), correlation (0.23901)*/,
4,11, 9,12/*mean (0.226226), correlation (0.258255)*/,
0,-8, 1,-13/*mean (0.0897886), correlation (0.274827)*/,
-13,-2, -8,2/*mean (0.148774), correlation (0.28065)*/,
-3,-2, -2,3/*mean (0.153048), correlation (0.283063)*/,
-6,9, -4,-9/*mean (0.169523), correlation (0.278248)*/,
8,12, 10,7/*mean (0.225337), correlation (0.282851)*/,
0,9, 1,3/*mean (0.226687), correlation (0.278734)*/,
7,-5, 11,-10/*mean (0.00693882), correlation (0.305161)*/,
-13,-6, -11,0/*mean (0.0227283), correlation (0.300181)*/,
10,7, 12,1/*mean (0.125517), correlation (0.31089)*/,
-6,-3, -6,12/*mean (0.131748), correlation (0.312779)*/,
10,-9, 12,-4/*mean (0.144827), correlation (0.292797)*/,
-13,8, -8,-12/*mean (0.149202), correlation (0.308918)*/,
-13,0, -8,-4/*mean (0.160909), correlation (0.310013)*/,
3,3, 7,8/*mean (0.177755), correlation (0.309394)*/,
5,7, 10,-7/*mean (0.212337), correlation (0.310315)*/,
-1,7, 1,-12/*mean (0.214429), correlation (0.311933)*/,
3,-10, 5,6/*mean (0.235807), correlation (0.313104)*/,
2,-4, 3,-10/*mean (0.00494827), correlation (0.344948)*/,
-13,0, -13,5/*mean (0.0549145), correlation (0.344675)*/,
-13,-7, -12,12/*mean (0.103385), correlation (0.342715)*/,
-13,3, -11,8/*mean (0.134222), correlation (0.322922)*/,
-7,12, -4,7/*mean (0.153284), correlation (0.337061)*/,
6,-10, 12,8/*mean (0.154881), correlation (0.329257)*/,
-9,-1, -7,-6/*mean (0.200967), correlation (0.33312)*/,
-2,-5, 0,12/*mean (0.201518), correlation (0.340635)*/,
-12,5, -7,5/*mean (0.207805), correlation (0.335631)*/,
3,-10, 8,-13/*mean (0.224438), correlation (0.34504)*/,
-7,-7, -4,5/*mean (0.239361), correlation (0.338053)*/,
-3,-2, -1,-7/*mean (0.240744), correlation (0.344322)*/,
2,9, 5,-11/*mean (0.242949), correlation (0.34145)*/,
-11,-13, -5,-13/*mean (0.244028), correlation (0.336861)*/,
-1,6, 0,-1/*mean (0.247571), correlation (0.343684)*/,
5,-3, 5,2/*mean (0.000697256), correlation (0.357265)*/,
-4,-13, -4,12/*mean (0.00213675), correlation (0.373827)*/,
-9,-6, -9,6/*mean (0.0126856), correlation (0.373938)*/,
-12,-10, -8,-4/*mean (0.0152497), correlation (0.364237)*/,
10,2, 12,-3/*mean (0.0299933), correlation (0.345292)*/,
7,12, 12,12/*mean (0.0307242), correlation (0.366299)*/,
-7,-13, -6,5/*mean (0.0534975), correlation (0.368357)*/,
-4,9, -3,4/*mean (0.099865), correlation (0.372276)*/,
7,-1, 12,2/*mean (0.117083), correlation (0.364529)*/,
-7,6, -5,1/*mean (0.126125), correlation (0.369606)*/,
-13,11, -12,5/*mean (0.130364), correlation (0.358502)*/,
-3,7, -2,-6/*mean (0.131691), correlation (0.375531)*/,
7,-8, 12,-7/*mean (0.160166), correlation (0.379508)*/,
-13,-7, -11,-12/*mean (0.167848), correlation (0.353343)*/,
1,-3, 12,12/*mean (0.183378), correlation (0.371916)*/,
2,-6, 3,0/*mean (0.228711), correlation (0.371761)*/,
-4,3, -2,-13/*mean (0.247211), correlation (0.364063)*/,
-1,-13, 1,9/*mean (0.249325), correlation (0.378139)*/,
7,1, 8,-6/*mean (0.000652272), correlation (0.411682)*/,
1,-1, 3,12/*mean (0.00248538), correlation (0.392988)*/,
9,1, 12,6/*mean (0.0206815), correlation (0.386106)*/,
-1,-9, -1,3/*mean (0.0364485), correlation (0.410752)*/,
-13,-13, -10,5/*mean (0.0376068), correlation (0.398374)*/,
7,7, 10,12/*mean (0.0424202), correlation (0.405663)*/,
12,-5, 12,9/*mean (0.0942645), correlation (0.410422)*/,
6,3, 7,11/*mean (0.1074), correlation (0.413224)*/,
5,-13, 6,10/*mean (0.109256), correlation (0.408646)*/,
2,-12, 2,3/*mean (0.131691), correlation (0.416076)*/,
3,8, 4,-6/*mean (0.165081), correlation (0.417569)*/,
2,6, 12,-13/*mean (0.171874), correlation (0.408471)*/,
9,-12, 10,3/*mean (0.175146), correlation (0.41296)*/,
-8,4, -7,9/*mean (0.183682), correlation (0.402956)*/,
-11,12, -4,-6/*mean (0.184672), correlation (0.416125)*/,
1,12, 2,-8/*mean (0.191487), correlation (0.386696)*/,
6,-9, 7,-4/*mean (0.192668), correlation (0.394771)*/,
2,3, 3,-2/*mean (0.200157), correlation (0.408303)*/,
6,3, 11,0/*mean (0.204588), correlation (0.411762)*/,
3,-3, 8,-8/*mean (0.205904), correlation (0.416294)*/,
7,8, 9,3/*mean (0.213237), correlation (0.409306)*/,
-11,-5, -6,-4/*mean (0.243444), correlation (0.395069)*/,
-10,11, -5,10/*mean (0.247672), correlation (0.413392)*/,
-5,-8, -3,12/*mean (0.24774), correlation (0.411416)*/,
-10,5, -9,0/*mean (0.00213675), correlation (0.454003)*/,
8,-1, 12,-6/*mean (0.0293635), correlation (0.455368)*/,
4,-6, 6,-11/*mean (0.0404971), correlation (0.457393)*/,
-10,12, -8,7/*mean (0.0481107), correlation (0.448364)*/,
4,-2, 6,7/*mean (0.050641), correlation (0.455019)*/,
-2,0, -2,12/*mean (0.0525978), correlation (0.44338)*/,
-5,-8, -5,2/*mean (0.0629667), correlation (0.457096)*/,
7,-6, 10,12/*mean (0.0653846), correlation (0.445623)*/,
-9,-13, -8,-8/*mean (0.0858749), correlation (0.449789)*/,
-5,-13, -5,-2/*mean (0.122402), correlation (0.450201)*/,
8,-8, 9,-13/*mean (0.125416), correlation (0.453224)*/,
-9,-11, -9,0/*mean (0.130128), correlation (0.458724)*/,
1,-8, 1,-2/*mean (0.132467), correlation (0.440133)*/,
7,-4, 9,1/*mean (0.132692), correlation (0.454)*/,
-2,1, -1,-4/*mean (0.135695), correlation (0.455739)*/,
11,-6, 12,-11/*mean (0.142904), correlation (0.446114)*/,
-12,-9, -6,4/*mean (0.146165), correlation (0.451473)*/,
3,7, 7,12/*mean (0.147627), correlation (0.456643)*/,
5,5, 10,8/*mean (0.152901), correlation (0.455036)*/,
0,-4, 2,8/*mean (0.167083), correlation (0.459315)*/,
-9,12, -5,-13/*mean (0.173234), correlation (0.454706)*/,
0,7, 2,12/*mean (0.18312), correlation (0.433855)*/,
-1,2, 1,7/*mean (0.185504), correlation (0.443838)*/,
5,11, 7,-9/*mean (0.185706), correlation (0.451123)*/,
3,5, 6,-8/*mean (0.188968), correlation (0.455808)*/,
-13,-4, -8,9/*mean (0.191667), correlation (0.459128)*/,
-5,9, -3,-3/*mean (0.193196), correlation (0.458364)*/,
-4,-7, -3,-12/*mean (0.196536), correlation (0.455782)*/,
6,5, 8,0/*mean (0.1972), correlation (0.450481)*/,
-7,6, -6,12/*mean (0.199438), correlation (0.458156)*/,
-13,6, -5,-2/*mean (0.211224), correlation (0.449548)*/,
1,-10, 3,10/*mean (0.211718), correlation (0.440606)*/,
4,1, 8,-4/*mean (0.213034), correlation (0.443177)*/,
-2,-2, 2,-13/*mean (0.234334), correlation (0.455304)*/,
2,-12, 12,12/*mean (0.235684), correlation (0.443436)*/,
-2,-13, 0,-6/*mean (0.237674), correlation (0.452525)*/,
4,1, 9,3/*mean (0.23962), correlation (0.444824)*/,
-6,-10, -3,-5/*mean (0.248459), correlation (0.439621)*/,
-3,-13, -1,1/*mean (0.249505), correlation (0.456666)*/,
7,5, 12,-11/*mean (0.00119208), correlation (0.495466)*/,
4,-2, 5,-7/*mean (0.00372245), correlation (0.484214)*/,
-13,9, -9,-5/*mean (0.00741116), correlation (0.499854)*/,
7,1, 8,6/*mean (0.0208952), correlation (0.499773)*/,
7,-8, 7,6/*mean (0.0220085), correlation (0.501609)*/,
-7,-4, -7,1/*mean (0.0233806), correlation (0.496568)*/,
-8,11, -7,-8/*mean (0.0236505), correlation (0.489719)*/,
-13,6, -12,-8/*mean (0.0268781), correlation (0.503487)*/,
2,4, 3,9/*mean (0.0323324), correlation (0.501938)*/,
10,-5, 12,3/*mean (0.0399235), correlation (0.494029)*/,
-6,-5, -6,7/*mean (0.0420153), correlation (0.486579)*/,
8,-3, 9,-8/*mean (0.0548021), correlation (0.484237)*/,
2,-12, 2,8/*mean (0.0616622), correlation (0.496642)*/,
-11,-2, -10,3/*mean (0.0627755), correlation (0.498563)*/,
-12,-13, -7,-9/*mean (0.0829622), correlation (0.495491)*/,
-11,0, -10,-5/*mean (0.0843342), correlation (0.487146)*/,
5,-3, 11,8/*mean (0.0929937), correlation (0.502315)*/,
-2,-13, -1,12/*mean (0.113327), correlation (0.48941)*/,
-1,-8, 0,9/*mean (0.132119), correlation (0.467268)*/,
-13,-11, -12,-5/*mean (0.136269), correlation (0.498771)*/,
-10,-2, -10,11/*mean (0.142173), correlation (0.498714)*/,
-3,9, -2,-13/*mean (0.144141), correlation (0.491973)*/,
2,-3, 3,2/*mean (0.14892), correlation (0.500782)*/,
-9,-13, -4,0/*mean (0.150371), correlation (0.498211)*/,
-4,6, -3,-10/*mean (0.152159), correlation (0.495547)*/,
-4,12, -2,-7/*mean (0.156152), correlation (0.496925)*/,
-6,-11, -4,9/*mean (0.15749), correlation (0.499222)*/,
6,-3, 6,11/*mean (0.159211), correlation (0.503821)*/,
-13,11, -5,5/*mean (0.162427), correlation (0.501907)*/,
11,11, 12,6/*mean (0.16652), correlation (0.497632)*/,
7,-5, 12,-2/*mean (0.169141), correlation (0.484474)*/,
-1,12, 0,7/*mean (0.169456), correlation (0.495339)*/,
-4,-8, -3,-2/*mean (0.171457), correlation (0.487251)*/,
-7,1, -6,7/*mean (0.175), correlation (0.500024)*/,
-13,-12, -8,-13/*mean (0.175866), correlation (0.497523)*/,
-7,-2, -6,-8/*mean (0.178273), correlation (0.501854)*/,
-8,5, -6,-9/*mean (0.181107), correlation (0.494888)*/,
-5,-1, -4,5/*mean (0.190227), correlation (0.482557)*/,
-13,7, -8,10/*mean (0.196739), correlation (0.496503)*/,
1,5, 5,-13/*mean (0.19973), correlation (0.499759)*/,
1,0, 10,-13/*mean (0.204465), correlation (0.49873)*/,
9,12, 10,-1/*mean (0.209334), correlation (0.49063)*/,
5,-8, 10,-9/*mean (0.211134), correlation (0.503011)*/,
-1,11, 1,-13/*mean (0.212), correlation (0.499414)*/,
-9,-3, -6,2/*mean (0.212168), correlation (0.480739)*/,
-1,-10, 1,12/*mean (0.212731), correlation (0.502523)*/,
-13,1, -8,-10/*mean (0.21327), correlation (0.489786)*/,
8,-11, 10,-6/*mean (0.214159), correlation (0.488246)*/,
2,-13, 3,-6/*mean (0.216993), correlation (0.50287)*/,
7,-13, 12,-9/*mean (0.223639), correlation (0.470502)*/,
-10,-10, -5,-7/*mean (0.224089), correlation (0.500852)*/,
-10,-8, -8,-13/*mean (0.228666), correlation (0.502629)*/,
4,-6, 8,5/*mean (0.22906), correlation (0.498305)*/,
3,12, 8,-13/*mean (0.233378), correlation (0.503825)*/,
-4,2, -3,-3/*mean (0.234323), correlation (0.476692)*/,
5,-13, 10,-12/*mean (0.236392), correlation (0.475462)*/,
4,-13, 5,-1/*mean (0.236842), correlation (0.504132)*/,
-9,9, -4,3/*mean (0.236977), correlation (0.497739)*/,
0,3, 3,-9/*mean (0.24314), correlation (0.499398)*/,
-12,1, -6,1/*mean (0.243297), correlation (0.489447)*/,
3,2, 4,-8/*mean (0.00155196), correlation (0.553496)*/,
-10,-10, -10,9/*mean (0.00239541), correlation (0.54297)*/,
8,-13, 12,12/*mean (0.0034413), correlation (0.544361)*/,
-8,-12, -6,-5/*mean (0.003565), correlation (0.551225)*/,
2,2, 3,7/*mean (0.00835583), correlation (0.55285)*/,
10,6, 11,-8/*mean (0.00885065), correlation (0.540913)*/,
6,8, 8,-12/*mean (0.0101552), correlation (0.551085)*/,
-7,10, -6,5/*mean (0.0102227), correlation (0.533635)*/,
-3,-9, -3,9/*mean (0.0110211), correlation (0.543121)*/,
-1,-13, -1,5/*mean (0.0113473), correlation (0.550173)*/,
-3,-7, -3,4/*mean (0.0140913), correlation (0.554774)*/,
-8,-2, -8,3/*mean (0.017049), correlation (0.55461)*/,
4,2, 12,12/*mean (0.01778), correlation (0.546921)*/,
2,-5, 3,11/*mean (0.0224022), correlation (0.549667)*/,
6,-9, 11,-13/*mean (0.029161), correlation (0.546295)*/,
3,-1, 7,12/*mean (0.0303081), correlation (0.548599)*/,
11,-1, 12,4/*mean (0.0355151), correlation (0.523943)*/,
-3,0, -3,6/*mean (0.0417904), correlation (0.543395)*/,
4,-11, 4,12/*mean (0.0487292), correlation (0.542818)*/,
2,-4, 2,1/*mean (0.0575124), correlation (0.554888)*/,
-10,-6, -8,1/*mean (0.0594242), correlation (0.544026)*/,
-13,7, -11,1/*mean (0.0597391), correlation (0.550524)*/,
-13,12, -11,-13/*mean (0.0608974), correlation (0.55383)*/,
6,0, 11,-13/*mean (0.065126), correlation (0.552006)*/,
0,-1, 1,4/*mean (0.074224), correlation (0.546372)*/,
-13,3, -9,-2/*mean (0.0808592), correlation (0.554875)*/,
-9,8, -6,-3/*mean (0.0883378), correlation (0.551178)*/,
-13,-6, -8,-2/*mean (0.0901035), correlation (0.548446)*/,
5,-9, 8,10/*mean (0.0949843), correlation (0.554694)*/,
2,7, 3,-9/*mean (0.0994152), correlation (0.550979)*/,
-1,-6, -1,-1/*mean (0.10045), correlation (0.552714)*/,
9,5, 11,-2/*mean (0.100686), correlation (0.552594)*/,
11,-3, 12,-8/*mean (0.101091), correlation (0.532394)*/,
3,0, 3,5/*mean (0.101147), correlation (0.525576)*/,
-1,4, 0,10/*mean (0.105263), correlation (0.531498)*/,
3,-6, 4,5/*mean (0.110785), correlation (0.540491)*/,
-13,0, -10,5/*mean (0.112798), correlation (0.536582)*/,
5,8, 12,11/*mean (0.114181), correlation (0.555793)*/,
8,9, 9,-6/*mean (0.117431), correlation (0.553763)*/,
7,-4, 8,-12/*mean (0.118522), correlation (0.553452)*/,
-10,4, -10,9/*mean (0.12094), correlation (0.554785)*/,
7,3, 12,4/*mean (0.122582), correlation (0.555825)*/,
9,-7, 10,-2/*mean (0.124978), correlation (0.549846)*/,
7,0, 12,-2/*mean (0.127002), correlation (0.537452)*/,
-1,-6, 0,-11/*mean (0.127148), correlation (0.547401)*/
};
static void makeRandomPattern(int patchSize, Point* pattern, int npoints)
{
RNG rng(0x34985739); // we always start with a fixed seed,
// to make patterns the same on each run
for( int i = 0; i < npoints; i++ )
{
pattern[i].x = rng.uniform(-patchSize/2, patchSize/2+1);
pattern[i].y = rng.uniform(-patchSize/2, patchSize/2+1);
}
}
static inline float getScale(int level, int firstLevel, double scaleFactor)
{
return (float)std::pow(scaleFactor, (double)(level - firstLevel));
}
/** Constructor
* @param detector_params parameters to use
*/
ORB::ORB(int _nfeatures, float _scaleFactor, int _nlevels, int _edgeThreshold,
int _firstLevel, int _WTA_K, int _scoreType, int _patchSize) :
nfeatures(_nfeatures), scaleFactor(_scaleFactor), nlevels(_nlevels),
edgeThreshold(_edgeThreshold), firstLevel(_firstLevel), WTA_K(_WTA_K),
scoreType(_scoreType), patchSize(_patchSize)
{}
int ORB::descriptorSize() const
{
return kBytes;
}
int ORB::descriptorType() const
{
return CV_8U;
}
/** Compute the ORB features and descriptors on an image
* @param img the image to compute the features and descriptors on
* @param mask the mask to apply
* @param keypoints the resulting keypoints
*/
void ORB::operator()(InputArray image, InputArray mask, vector<KeyPoint>& keypoints) const
{
(*this)(image, mask, keypoints, noArray(), false);
}
/** Compute the ORB keypoint orientations
* @param image the image to compute the features and descriptors on
* @param integral_image the integral image of the iamge (can be empty, but the computation will be slower)
* @param scale the scale at which we compute the orientation
* @param keypoints the resulting keypoints
*/
static void computeOrientation(const Mat& image, vector<KeyPoint>& keypoints,
int halfPatchSize, const vector<int>& umax)
{
// Process each keypoint
for (vector<KeyPoint>::iterator keypoint = keypoints.begin(),
keypointEnd = keypoints.end(); keypoint != keypointEnd; ++keypoint)
{
keypoint->angle = IC_Angle(image, halfPatchSize, keypoint->pt, umax);
}
}
/** Compute the ORB keypoints on an image
* @param image_pyramid the image pyramid to compute the features and descriptors on
* @param mask_pyramid the masks to apply at every level
* @param keypoints the resulting keypoints, clustered per level
*/
static void computeKeyPoints(const vector<Mat>& imagePyramid,
const vector<Mat>& maskPyramid,
vector<vector<KeyPoint> >& allKeypoints,
int nfeatures, int firstLevel, double scaleFactor,
int edgeThreshold, int patchSize, int scoreType )
{
int nlevels = (int)imagePyramid.size();
vector<int> nfeaturesPerLevel(nlevels);
// fill the extractors and descriptors for the corresponding scales
float factor = (float)(1.0 / scaleFactor);
float ndesiredFeaturesPerScale = nfeatures*(1 - factor)/(1 - (float)pow((double)factor, (double)nlevels));
int sumFeatures = 0;
for( int level = 0; level < nlevels-1; level++ )
{
nfeaturesPerLevel[level] = cvRound(ndesiredFeaturesPerScale);
sumFeatures += nfeaturesPerLevel[level];
ndesiredFeaturesPerScale *= factor;
}
nfeaturesPerLevel[nlevels-1] = std::max(nfeatures - sumFeatures, 0);
// Make sure we forget about what is too close to the boundary
//edge_threshold_ = std::max(edge_threshold_, patch_size_/2 + kKernelWidth / 2 + 2);
// pre-compute the end of a row in a circular patch
int halfPatchSize = patchSize / 2;
vector<int> umax(halfPatchSize + 2);
int v, v0, vmax = cvFloor(halfPatchSize * sqrt(2.f) / 2 + 1);
int vmin = cvCeil(halfPatchSize * sqrt(2.f) / 2);
for (v = 0; v <= vmax; ++v)
umax[v] = cvRound(sqrt((double)halfPatchSize * halfPatchSize - v * v));
// Make sure we are symmetric
for (v = halfPatchSize, v0 = 0; v >= vmin; --v)
{
while (umax[v0] == umax[v0 + 1])
++v0;
umax[v] = v0;
++v0;
}
allKeypoints.resize(nlevels);
for (int level = 0; level < nlevels; ++level)
{
int featuresNum = nfeaturesPerLevel[level];
allKeypoints[level].reserve(featuresNum*2);
vector<KeyPoint> & keypoints = allKeypoints[level];
// Detect FAST features, 20 is a good threshold
FastFeatureDetector fd(20, true);
fd.detect(imagePyramid[level], keypoints, maskPyramid[level]);
// Remove keypoints very close to the border
KeyPointsFilter::runByImageBorder(keypoints, imagePyramid[level].size(), edgeThreshold);
if( scoreType == ORB::HARRIS_SCORE )
{
// Keep more points than necessary as FAST does not give amazing corners
KeyPointsFilter::retainBest(keypoints, 2 * featuresNum);
// Compute the Harris cornerness (better scoring than FAST)
HarrisResponses(imagePyramid[level], keypoints, 7, HARRIS_K);
}
//cull to the final desired level, using the new Harris scores or the original FAST scores.
KeyPointsFilter::retainBest(keypoints, featuresNum);
float sf = getScale(level, firstLevel, scaleFactor);
// Set the level of the coordinates
for (vector<KeyPoint>::iterator keypoint = keypoints.begin(),
keypointEnd = keypoints.end(); keypoint != keypointEnd; ++keypoint)
{
keypoint->octave = level;
keypoint->size = patchSize*sf;
}
computeOrientation(imagePyramid[level], keypoints, halfPatchSize, umax);
}
}
/** Compute the ORB decriptors
* @param image the image to compute the features and descriptors on
* @param integral_image the integral image of the image (can be empty, but the computation will be slower)
* @param level the scale at which we compute the orientation
* @param keypoints the keypoints to use
* @param descriptors the resulting descriptors
*/
static void computeDescriptors(const Mat& image, vector<KeyPoint>& keypoints, Mat& descriptors,
const vector<Point>& pattern, int dsize, int WTA_K)
{
//convert to grayscale if more than one color
CV_Assert(image.type() == CV_8UC1);
//create the descriptor mat, keypoints.size() rows, BYTES cols
descriptors = Mat::zeros((int)keypoints.size(), dsize, CV_8UC1);
for (size_t i = 0; i < keypoints.size(); i++)
computeOrbDescriptor(keypoints[i], image, &pattern[0], descriptors.ptr((int)i), dsize, WTA_K);
}
/** Compute the ORB features and descriptors on an image
* @param img the image to compute the features and descriptors on
* @param mask the mask to apply
* @param keypoints the resulting keypoints
* @param descriptors the resulting descriptors
* @param do_keypoints if true, the keypoints are computed, otherwise used as an input
* @param do_descriptors if true, also computes the descriptors
*/
void ORB::operator()( InputArray _image, InputArray _mask, vector<KeyPoint>& _keypoints,
OutputArray _descriptors, bool useProvidedKeypoints) const
{
CV_Assert(patchSize >= 2);
bool do_keypoints = !useProvidedKeypoints;//do_keypoints的作用是监测是否使用已经检测出的特征点。如果在使用orb算法之前已经通过fast等算法计算出了特征
//点的位置则应该:useProvidedKeypoints ==ture。反之则等于false。
bool do_descriptors = _descriptors.needed();//监测是否需要重新计算特征描述子。
if( (!do_keypoints && !do_descriptors) || _image.empty() )
return;
//ROI handling
const int HARRIS_BLOCK_SIZE = 9;
int halfPatchSize = patchSize / 2;
int border = std::max(edgeThreshold, std::max(halfPatchSize, HARRIS_BLOCK_SIZE/2))+1;
Mat image = _image.getMat(), mask = _mask.getMat();
if( image.type() != CV_8UC1 )
cvtColor(_image, image, CV_BGR2GRAY);
int levelsNum = this->nlevels;
if( !do_keypoints )
{
// if we have pre-computed keypoints, they may use more levels than it is set in parameters
// !!!TODO!!! implement more correct method, independent from the used keypoint detector.
// Namely, the detector should provide correct size of each keypoint. Based on the keypoint size
// and the algorithm used (i.e. BRIEF, running on 31x31 patches) we should compute the approximate
// scale-factor that we need to apply. Then we should cluster all the computed scale-factors and
// for each cluster compute the corresponding image.
//
// In short, ultimately the descriptor should
// ignore octave parameter and deal only with the keypoint size.
levelsNum = 0;
for( size_t i = 0; i < _keypoints.size(); i++ )
levelsNum = std::max(levelsNum, std::max(_keypoints[i].octave, 0));
levelsNum++;
}
// Pre-compute the scale pyramids计算尺度金字塔
vector<Mat> imagePyramid(levelsNum), maskPyramid(levelsNum);
for (int level = 0; level < levelsNum; ++level)
{
float scale = 1/getScale(level, firstLevel, scaleFactor);
Size sz(cvRound(image.cols*scale), cvRound(image.rows*scale));
Size wholeSize(sz.width + border*2, sz.height + border*2);
Mat temp(wholeSize, image.type()), masktemp;
imagePyramid[level] = temp(Rect(border, border, sz.width, sz.height));
if( !mask.empty() )
{
masktemp = Mat(wholeSize, mask.type());
maskPyramid[level] = masktemp(Rect(border, border, sz.width, sz.height));
}
// Compute the resized image
if( level != firstLevel )
{
if( level < firstLevel )
{
resize(image, imagePyramid[level], sz, 0, 0, INTER_LINEAR);
if (!mask.empty())
resize(mask, maskPyramid[level], sz, 0, 0, INTER_LINEAR);
}
else
{
resize(imagePyramid[level-1], imagePyramid[level], sz, 0, 0, INTER_LINEAR);
if (!mask.empty())
{
resize(maskPyramid[level-1], maskPyramid[level], sz, 0, 0, INTER_LINEAR);
threshold(maskPyramid[level], maskPyramid[level], 254, 0, THRESH_TOZERO);
}
}
copyMakeBorder(imagePyramid[level], temp, border, border, border, border,
BORDER_REFLECT_101+BORDER_ISOLATED);
if (!mask.empty())
copyMakeBorder(maskPyramid[level], masktemp, border, border, border, border,
BORDER_CONSTANT+BORDER_ISOLATED);
}
else
{
copyMakeBorder(image, temp, border, border, border, border,
BORDER_REFLECT_101);
if( !mask.empty() )
copyMakeBorder(mask, masktemp, border, border, border, border,
BORDER_CONSTANT+BORDER_ISOLATED);
}
}
// Pre-compute the keypoints (we keep the best over all scales, so this has to be done beforehand
vector < vector<KeyPoint> > allKeypoints;
if( do_keypoints )
{
// Get keypoints, those will be far enough from the border that no check will be required for the descriptor
computeKeyPoints(imagePyramid, maskPyramid, allKeypoints,
nfeatures, firstLevel, scaleFactor,
edgeThreshold, patchSize, scoreType);
// make sure we have the right number of keypoints keypoints
/*vector<KeyPoint> temp;
for (int level = 0; level < n_levels; ++level)
{
vector<KeyPoint>& keypoints = all_keypoints[level];
temp.insert(temp.end(), keypoints.begin(), keypoints.end());
keypoints.clear();
}
KeyPoint::retainBest(temp, n_features_);
for (vector<KeyPoint>::iterator keypoint = temp.begin(),
keypoint_end = temp.end(); keypoint != keypoint_end; ++keypoint)
all_keypoints[keypoint->octave].push_back(*keypoint);*/
}
else
{//在使用orb算法前,keypoint已经计算出来了,只需要在allpoints后面进行push_back就可以了。
// Remove keypoints very close to the border
KeyPointsFilter::runByImageBorder(_keypoints, image.size(), edgeThreshold);
// Cluster the input keypoints depending on the level they were computed at
allKeypoints.resize(levelsNum);
for (vector<KeyPoint>::iterator keypoint = _keypoints.begin(),
keypointEnd = _keypoints.end(); keypoint != keypointEnd; ++keypoint)
allKeypoints[keypoint->octave].push_back(*keypoint);
// Make sure we rescale the coordinates
for (int level = 0; level < levelsNum; ++level)
{
if (level == firstLevel)
continue;
vector<KeyPoint> & keypoints = allKeypoints[level];
float scale = 1/getScale(level, firstLevel, scaleFactor);
for (vector<KeyPoint>::iterator keypoint = keypoints.begin(),
keypointEnd = keypoints.end(); keypoint != keypointEnd; ++keypoint)
keypoint->pt *= scale;
}
}
Mat descriptors;
vector<Point> pattern;
if( do_descriptors )//需要进行特征描述子计算。
{
int nkeypoints = 0;
for (int level = 0; level < levelsNum; ++level)
nkeypoints += (int)allKeypoints[level].size();
if( nkeypoints == 0 )
_descriptors.release();
else//如果有keypoint,则建立descriptors,并分配内存。
{
_descriptors.create(nkeypoints, descriptorSize(), CV_8U);
descriptors = _descriptors.getMat();
}
const int npoints = 512;
Point patternbuf[npoints];
const Point* pattern0 = (const Point*)bit_pattern_31_;//通过查表来计算
if( patchSize != 31 )
{
pattern0 = patternbuf;
makeRandomPattern(patchSize, patternbuf, npoints);
}
CV_Assert( WTA_K == 2 || WTA_K == 3 || WTA_K == 4 );
if( WTA_K == 2 )
std::copy(pattern0, pattern0 + npoints, std::back_inserter(pattern));
else
{
int ntuples = descriptorSize()*4;
initializeOrbPattern(pattern0, pattern, ntuples, WTA_K, npoints);
}
}
_keypoints.clear();
int offset = 0;
for (int level = 0; level < levelsNum; ++level)
{
// Get the features and compute their orientation
vector<KeyPoint>& keypoints = allKeypoints[level];
int nkeypoints = (int)keypoints.size();
// Compute the descriptors
if (do_descriptors)
{
Mat desc;
if (!descriptors.empty())
{//desc 根据opencv的文档,rowRange是返回offset----offset + nkeypoints的一个mat,具体参看文档
desc = descriptors.rowRange(offset, offset + nkeypoints);
}//desc是层数为level的图像金字塔的描述子的mat。
offset += nkeypoints;
// preprocess the resized image
Mat& workingMat = imagePyramid[level];//workmat为这个level的引用,作用是用起来翻遍。
//boxFilter(working_mat, working_mat, working_mat.depth(), Size(5,5), Point(-1,-1), true, BORDER_REFLECT_101);
GaussianBlur(workingMat, workingMat, Size(7, 7), 2, 2, BORDER_REFLECT_101);//对图像进行搞死模糊
computeDescriptors(workingMat, keypoints, desc, pattern, descriptorSize(), WTA_K);//计算特征描述子。
}
// Copy to the output data
if (level != firstLevel)
{
float scale = getScale(level, firstLevel, scaleFactor);
for (vector<KeyPoint>::iterator keypoint = keypoints.begin(),
keypointEnd = keypoints.end(); keypoint != keypointEnd; ++keypoint)
keypoint->pt *= scale;
}
// And add the keypoints to the output
_keypoints.insert(_keypoints.end(), keypoints.begin(), keypoints.end());
}
}
void ORB::detectImpl( const Mat& image, vector<KeyPoint>& keypoints, const Mat& mask) const
{
(*this)(image, mask, keypoints, noArray(), false);
}
void ORB::computeImpl( const Mat& image, vector<KeyPoint>& keypoints, Mat& descriptors) const
{
(*this)(image, Mat(), keypoints, descriptors, true);
}
}

















 1万+
1万+






 到【灌水乐园】发言
到【灌水乐园】发言







