







提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
前言
继续学习《CANoe开发从入门到精通》,实现第二个例程。
由于篇幅原因,且在《一步一步动手实现CANoe例程》中有详细的步骤,本例程中数据库文件设计、系统变量及Panel设计就不再面面俱到的展开。
例程主要实现的功能如下:
(1)控制面板:通过调节钥匙锁车/开锁按钮、引擎钥匙旋钮、离合器档位切换、刹车模拟开关、危险警示灯按钮、左转右转按钮、引擎速度滑动条和车速滑动条等控件,模拟IPC需要的测试条件。
(2)显示面板:接收来自总线的报文,显示引擎信息、车速信息、离合器档位信息和车灯的状态等。
(3)添 加 Automation Sequences 功 能 实 现 Signal 和 System Variable的自动变化。
(4)添加Graphic窗口和State Tracker追踪窗口等,便于分析和检测等相关活动。
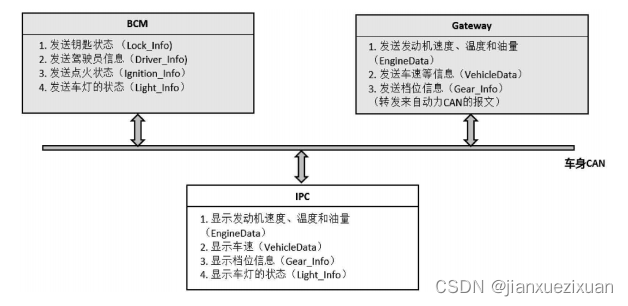
一、网络拓扑图
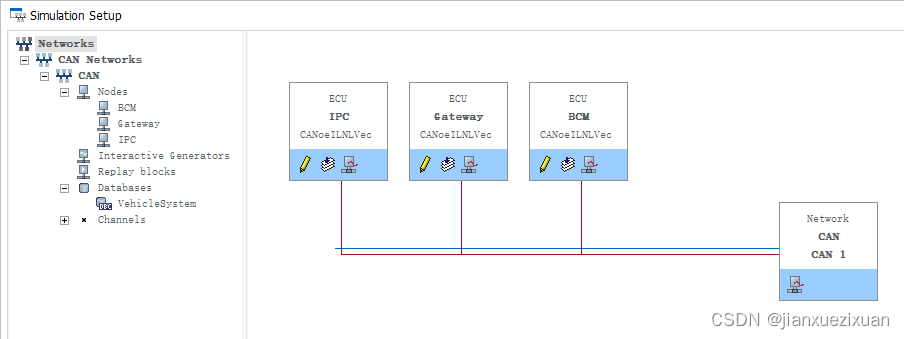
网络由仪表单元(IPC)、网关(Gateway)、车身控制器(BCM)三部分组成;
网络拓扑如下图所示:
二、数据库文件设计
1、以Vector_IL_Basic Template为模板创建一个名称为VehicleSystem的CAN数据库。将它的Protocol设置为CAN。
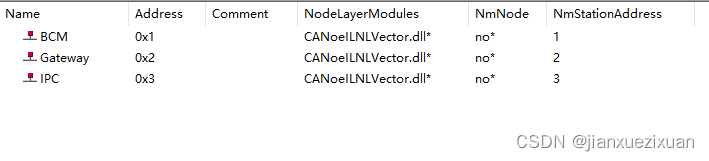
2、右击Network Nodes,新建BCM、IPC、Gateway三个网络节点。如下图所示:
3、右击Message,新建报文,参数设置如下所示:

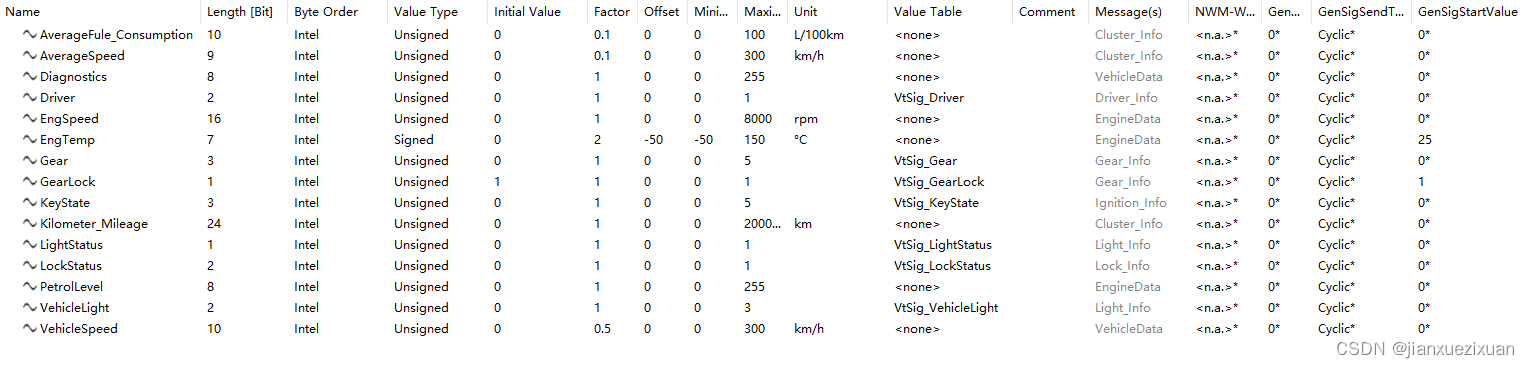
4、右击Signal,新建信号,参数设置如下所示:
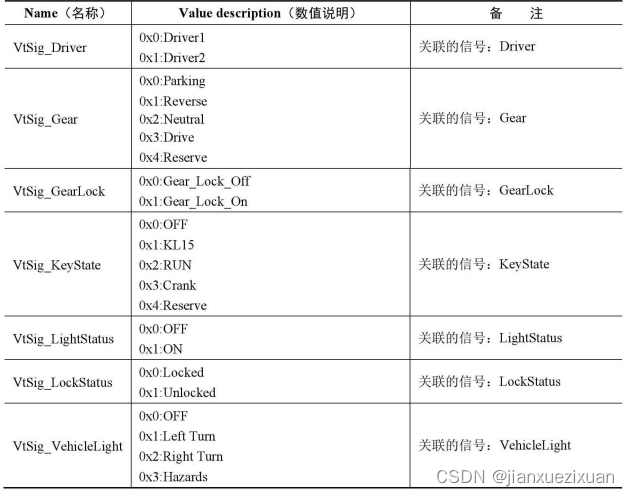
5、在CANdb++工具栏上,单击Value Tables图标,进入Value Tables界面,在空白处右击,创建Value Table如下:
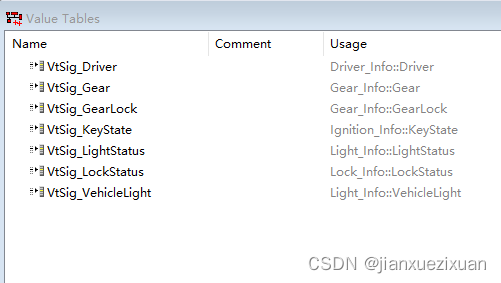
在Value Descriptions中参数设置如下所示:
至此,例程需要的DBC文件已经完成,将其导入仿真工程后如下所示:
三、设置系统变量
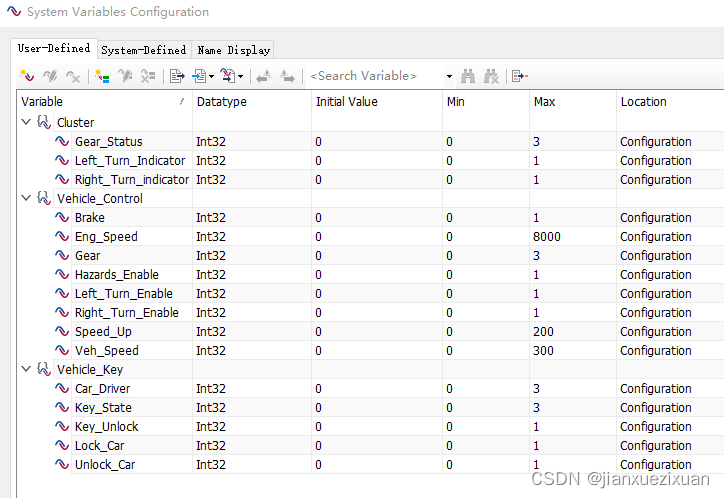
1、在CANoe主界面中选择Environment→System Variables,在左上侧空白窗口中单击鼠标右键系统变量,需要定义的系统变量列表及属性设置如下:
2、部分变量需要自己实现Value Table,
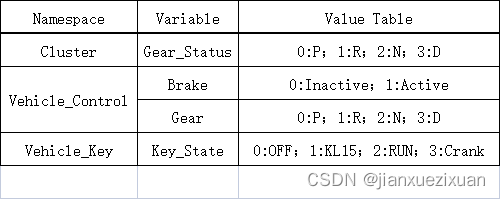
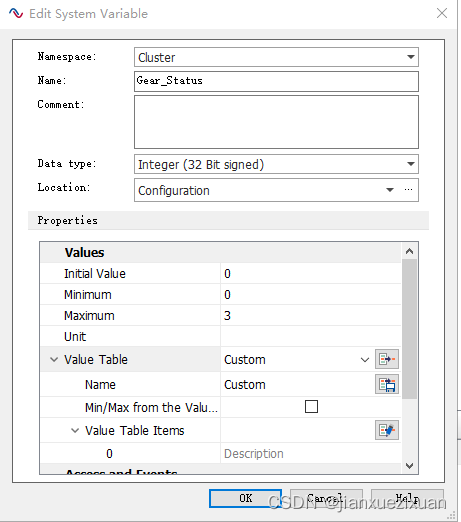
以Gear_Status为例,Value Table实现方法如下:
2.1、Values Table下拉选择Custom,如下图所示:
2.2、点击Value Table Items右侧的图标,进入Value Table编辑界面,如下图所示:
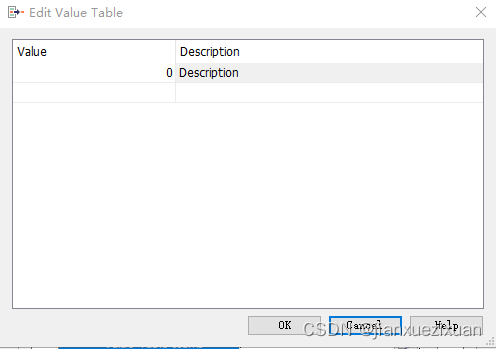
修改Value和Description为需要设置的值,如下所示:
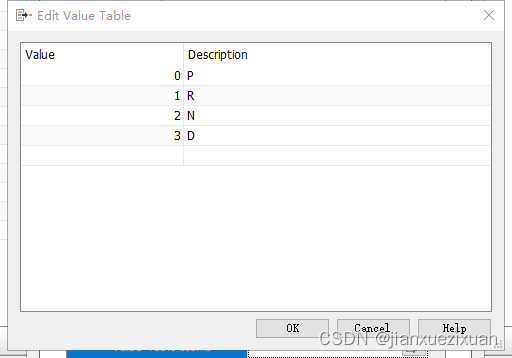
完成后如下所示:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 975
975











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









