







1.ROS安装及环境变量设置:
https://github.com/udacity/didi-competition/blob/master/docs/GettingStarted.md
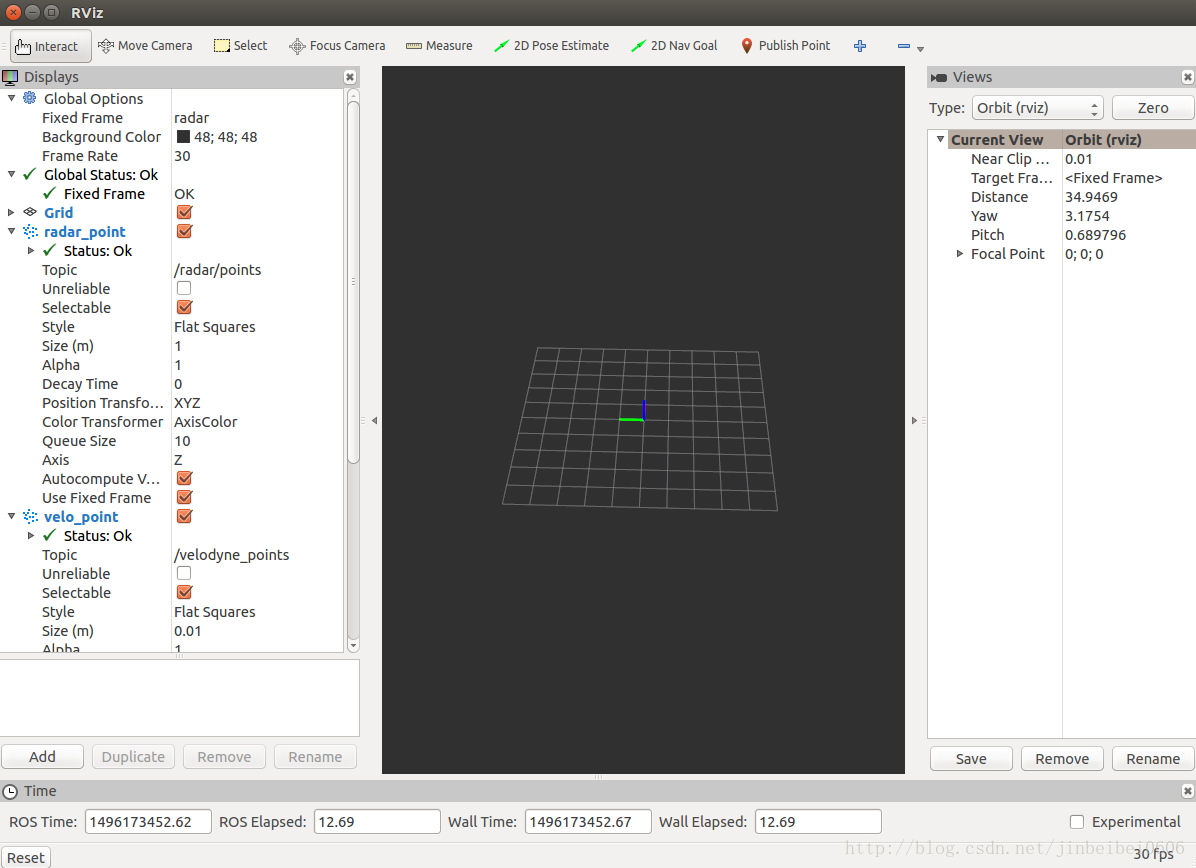
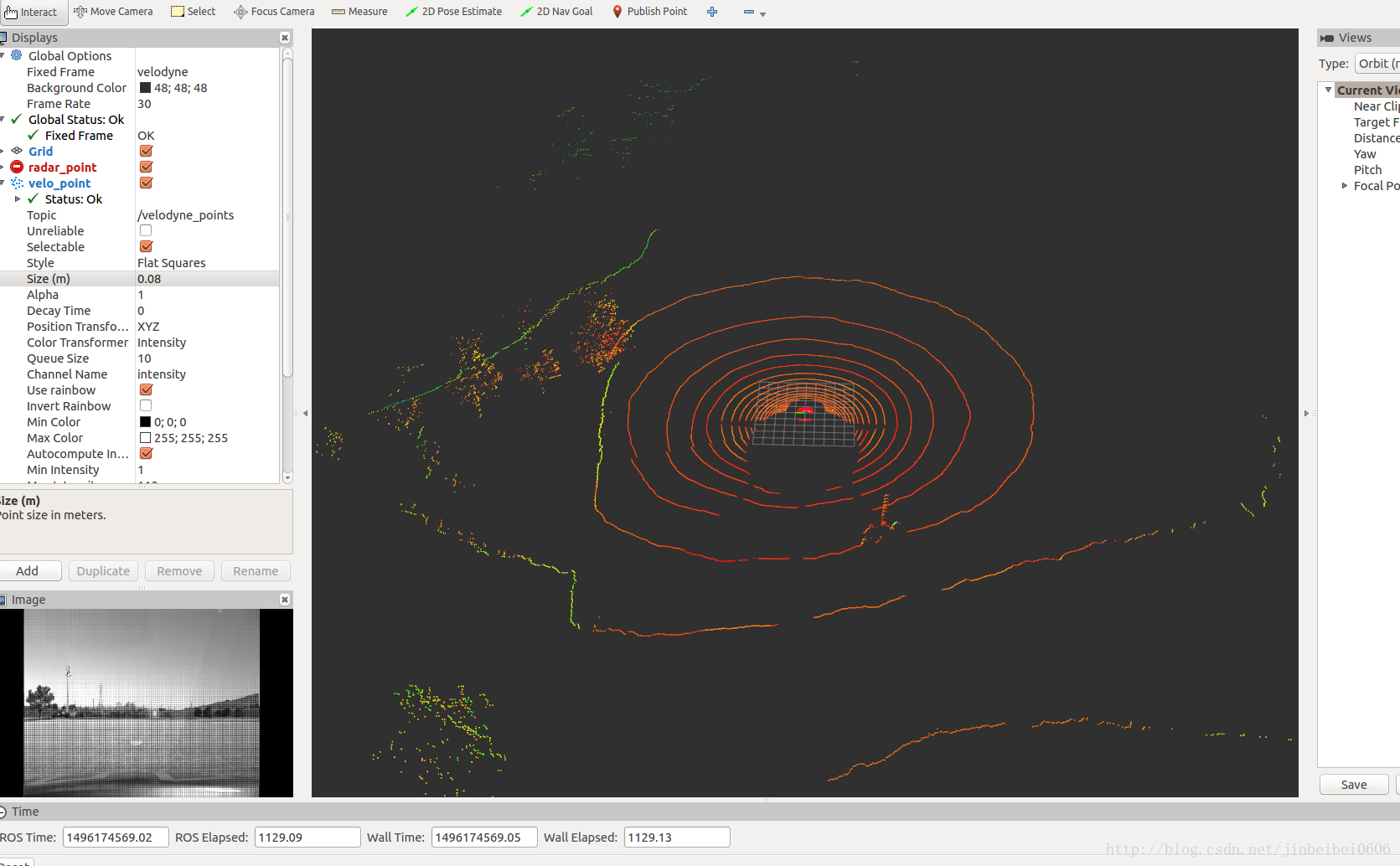
2.在 RVIZ显示image ,radar ,以及Lidar数据
(1)安装激光雷达驱动Install the Velodyne package for your version of ROS (Indigo in this example):
sudo apt-get install ros-indigo-velodyne
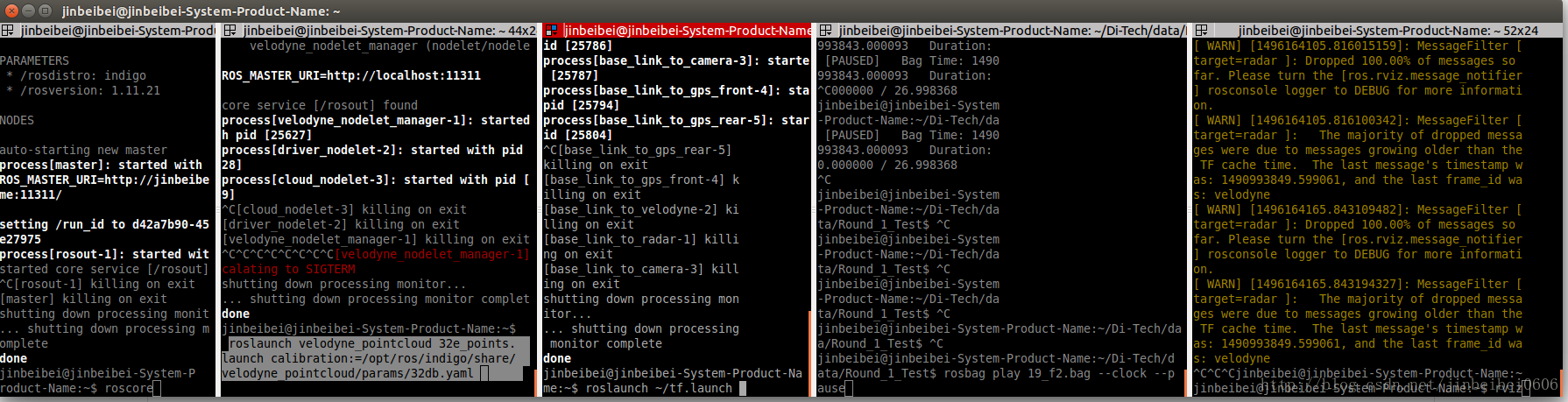
(2)rosrun velodyne_pointcloud cloud_node _calibration:=/opt/ros/indigo/share/velodyne_pointcloud/params/32db.yaml
(3)roscore
(4)rosbag play /{path-to-file}/bagfile_name.bag
(5)rviz
(6)














 912
912











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









