







人们普遍认为角点是二维图像亮度变化剧烈的点或图像边缘曲线上曲率极大值的点。这些点在保留图像图形重要特征的同时,可以有效地减少信息的数据量,使其信息的含量很高,有效地提高了计算的速度,有利于图像的可靠匹配,使得实时处理成为可能。其在三维场景重建、运动估计、目标跟踪、目标识别、图像配准与匹配等计算机视觉领域起着非常重要的作用。
角点的检测主要有两类基于图像边缘的方法和基于图像灰度的方法。前者很大程度上依赖于图像的分割和边缘提取,一旦待检测目标发生局部变化,很可能导致操作失败,因此该类方法使用范围较小;后者有很多方法,包括Harris算子,Moravec算子,Susan算子等等。
本文的目的是在学习了Harris算子后,进行一个总结。文献:《A COMBINED CORNER AND EDGE DETECTOR》,1988,Chris Harris & Mike Stephens
一、角点边缘的直观概念:
角点:最直观的印象就是在水平和竖直两个方向变化均较大的两个点,即X,Y方向梯度都较大
边缘:仅在水平或竖直方向有较大的变化量,即X、Y方向梯度只有一个较大
平坦区域:在水平和竖直方向的变化量均较小,即X、Y方向梯度都较小
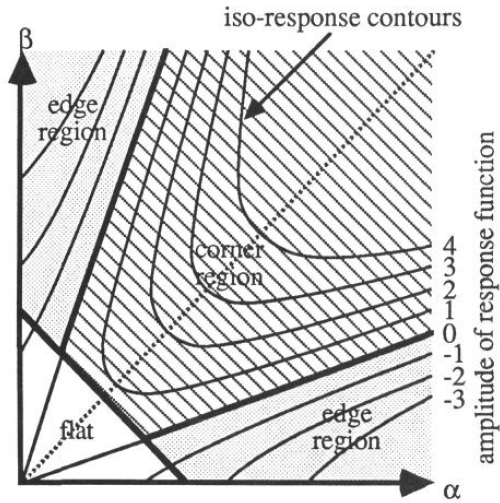
下图是理想情况的角点、边缘和平坦区域的示意图:

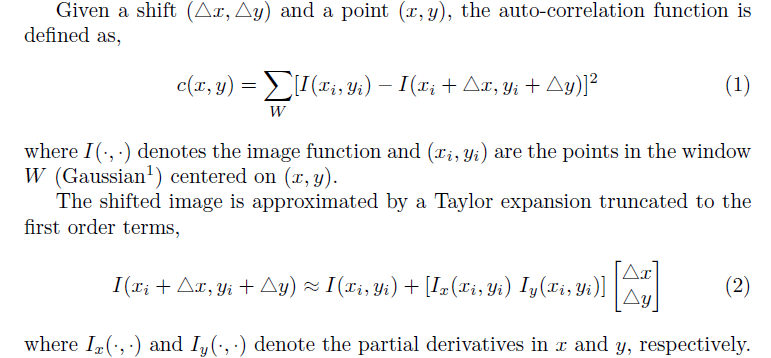
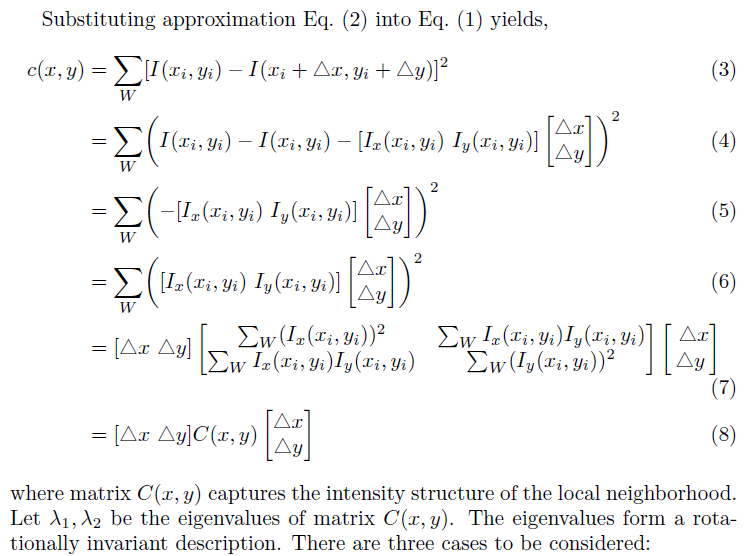
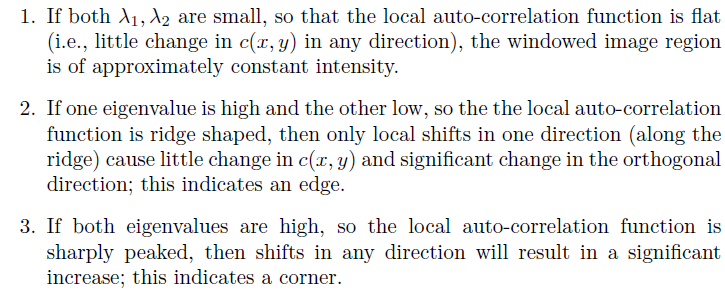
二、原理:
由于CSDN不知道怎么把编辑的公式弄进来,所以整段粘帖论文了,英文不难懂:
论文后面那三个注意点讲得不够详细而且要求特征值。1988年的论文中提出,可以用以下方法代替求特征值,并给出了角点相应函数R:
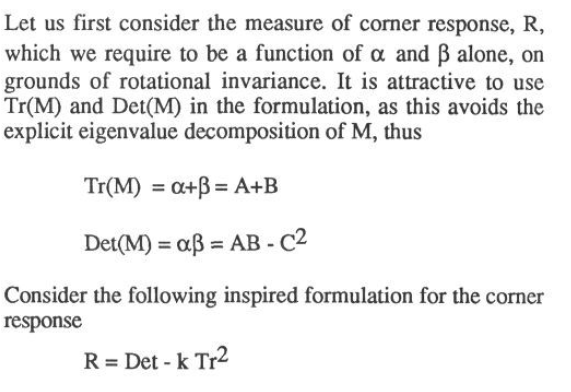
其中,A和B分别表示C(x,y)矩阵主对角线两个元素,C代表其副对角线元素。k和较大值判断的阈值T,在下面代码中给出,为经验数值。
如下图所示,当R为较大正数时,该区域为角点区域,当R为较大负数时,该区域为边缘区域,当R的绝对值较小时,该区域为平坦区域。
三、具体实现
我将分别给出matlab和 c 两个版本。其中,c 版本不是使用什么goodfeaturetotrack来实现的
matlab版本:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Harris角点提取算法 %
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear;
%filename = 'Lena.jpg';
filename='xx.png';
X = imread(filename); % 读取图像
% imshow(X);
Info = imfinfo(filename); %获取图像相关信息
if (Info.BitDepth > 8)
f = rgb2gray(X);
end
%《基于特征点的图像配准与拼接技术研究》
%计算图像亮度f(x,y)在点(x,y)处的梯度-----------------------------------------------
% fx = [5 0 -5;8 0 -8;5 0 -5]; % 高斯函数一阶微分,x方向(用于改进的Harris角点提取算法)
ori_im = double(f) / 255; %unit8转化为64为双精度double64
fx = [-2 -1 0 1 2]; % x方向梯度算子(用于Harris角点提取算法)
Ix = filter2(fx, ori_im); % x方向滤波
% fy = [5 8 5;0 0 0;-5 -8 -5]; % 高斯函数一阶微分,y方向(用于改进的Harris角点提取算法)
fy = [-2; -1; 0; 1; 2]; % y方向梯度算子(用于Harris角点提取算法)
Iy = filter2(fy, ori_im); % y方向滤波
%构造自相关矩阵---------------------------------------------------------------
Ix2 = Ix .^ 2;
Iy2 = Iy .^ 2;
Ixy = Ix .* Iy;
clear Ix;
clear Iy;
h= fspecial('gaussian', [7 7], 2); % 产生7*7的高斯窗函数,sigma=2
Ix2 = filter2(h,Ix2);
Iy2 = filter2(h,Iy2);
Ixy = filter2(h,Ixy);
%提取特征点---------------------------------------------------------------
height = size(ori_im, 1);
width = size(ori_im, 2);
result = zeros(height, width); % 纪录角点位置,角点处值为1
R = zeros(height, width);
Rmax = 0; % 图像中最大的R值
k = 0.06; %k为常系数,经验取值范围为0.04~0.06
for i = 1 : height
for j = 1 : width
M = [Ix2(i, j) Ixy(i, j); Ixy(i, j) Iy2(i, j)]; % auto correlation matrix
R(i,j) = det(M) - k * (trace(M)) ^ 2; % 计算R
if R(i,j) > Rmax
Rmax = R(i, j);
end;
end;
end;
%T = 0.01 * Rmax;%固定阈值,当R(i, j) > T时,则被判定为候选角点
T = 0.1 * Rmax;%固定阈值,当R(i, j) > T时,则被判定为候选角点
%在计算完各点的值后,进行局部非极大值抑制-------------------------------------
cnt = 0;
for i = 2 : height-1
for j = 2 : width-1
% 进行非极大抑制,窗口大小3*3
if (R(i, j) > T && R(i, j) > R(i-1, j-1) && R(i, j) > R(i-1, j) && R(i, j) > R(i-1, j+1) && R(i, j) > R(i, j-1) && ...
R(i, j) > R(i, j+1) && R(i, j) > R(i+1, j-1) && R(i, j) > R(i+1, j) && R(i, j) > R(i+1, j+1))
result(i, j) = 1;
cnt = cnt+1;
end;
end;
end;
i = 1;
for j = 1 : height
for k = 1 : width
if result(j, k) == 1;
corners1(i, 1) = j;
corners1(i, 2) = k;
i = i + 1;
end;
end;
end;
[posc, posr] = find(result == 1);
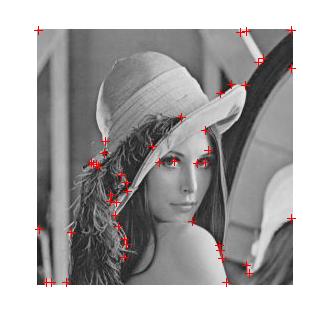
figure,imshow(ori_im);
hold on;
plot(posr, posc, 'r+');
运行效果图:

下面给出 c 语言版本,读图采用Opencv函数:
// My_corner.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include<iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <GL/glut.h>
using namespace std;
using namespace cv;
void m_filter(double *src,double *&dst,int height,int width,double *mask,int mW,int mH)
{
double a;
for (int i = 0;i < height;i++)
{
for (int j = 0;j < width;j++)
{
a = 0.0;
//去掉靠近边界的行列,无法滤波,超出范围
if (i > int(mH/2) && i < height - int(mH/2) && j > int(mW) && j < width - int(mW/2))
{
for (int m = 0;m < mH;m++)
{
for(int n = 0;n < mW;n++)
{
a += src[(i+m-int(mH/2))*width+(j+n-int(mW))]*mask[m*mW+n];
}
}
}
dst[i*width+j] = a;
}
}
}
int _tmain(int argc, _TCHAR* argv[])
{
Mat img_src = imread("test1.jpg");
Mat img_g,corner;
double *src,*img_x,*img_y,*img_x2,*img_y2,*img_xy;
Size size = img_src.size();
img_g = Mat(size,CV_8UC1);
corner = Mat(size,CV_8UC1);
src = new double[size.width*size.height];
img_x = new double[size.width*size.height];
img_y = new double[size.width*size.height];
img_x2 = new double[size.width*size.height];
img_y2 = new double[size.width*size.height];
img_xy = new double[size.width*size.height];
cvtColor(img_src,img_g,CV_BGR2GRAY);
for (int i=0;i<size.height;i++)
{
for (int j=0;j<size.width;j++)
{
src[i*size.width+j]=(double)img_g.data[i*size.width+j]/255;
}
}
//定义水平方向差分算子并求img_x
double dx[25] = {-2,-1,0,1,2,-2,-1,0,1,2,-2,-1,0,1,2,-2,-1,0,1,2,-2,-1,0,1,2};
m_filter(src,img_x,size.height,size.width,dx,5,5);
//定义垂直方向差分算子并求img_y
double dy[25] = {-2,-2,-2,-2,-2,-1,-1,-1,-1,-1,0,0,0,0,0,1,1,1,1,1,2,2,2,2,2};
m_filter(src,img_y,size.height,size.width,dy,5,5);
FILE *fp;
//fp=fopen("test.txt","w+");
//计算img_x2、img_y2、img_xy
for (int i = 0;i < size.height;i++)
{
for (int j = 0;j < size.width;j++)
{
img_x2[i*size.width+j] = img_x[i*size.width+j] * img_x[i*size.width+j];
img_y2[i*size.width+j] = img_y[i*size.width+j] * img_y[i*size.width+j];
img_xy[i*size.width+j] = img_x[i*size.width+j] * img_y[i*size.width+j];
//fprintf(fp,"%f,%f,%f,%f,%f",img_x[i*size.width+j],img_y[i*size.width+j],img_x2[i*size.width+j],img_y2[i*size.width+j],img_xy[i*size.width+j]);
//fprintf(fp,"\n");
}
}
//fclose(fp);
//对img_x2、img_y2、img_xy进行高斯平滑,本例中使用5×5的高斯模板
// 计算模版参数
int gausswidth = 7;
double sigma = 2;
double *g = new double[gausswidth*gausswidth];
for(int i = 0;i < gausswidth;i++)
for(int j = 0;j < gausswidth;j++)
{
g[i*gausswidth+j] = exp(-((i-int(gausswidth/2))*(i-int(gausswidth/2))+(j-int(gausswidth/2))*(j-int(gausswidth/2)))/(2*sigma));
}
//归一化:使模板参数之和为1
double total=0;
for(int i = 0;i < gausswidth*gausswidth;i++)
total += g[i];
for(int i = 0;i < gausswidth;i++)
for(int j = 0;j < gausswidth;j++){
g[i*gausswidth+j] /= total;
}
//进行高斯平滑
m_filter(img_x2,img_x2,size.height,size.width,g,gausswidth,gausswidth);
m_filter(img_y2,img_y2,size.height,size.width,g,gausswidth,gausswidth);
m_filter(img_xy,img_xy,size.height,size.width,g,gausswidth,gausswidth);
//计算角点量R,R(i,j) = det(M) - k * (trace(M)) ^ 2
//Tr(M)=img_x2+img_y2 ,det(M)=img_x2*img_y2-img_xy^2
double *R = new double[size.width*size.height];
double k = 0.06; //k为常系数,经验取值范围为0.04~0.06
double Rmax=0;
for(int i = 0; i < size.height; i++)
{
for(int j = 0; j < size.width; j++)
{
R[i*size.width+j] = img_x2[i*size.width+j] * img_y2[i*size.width+j] - img_xy[i*size.width+j] * img_xy[i*size.width+j] - k * (img_x2[i*size.width+j] + img_y2[i*size.width+j]) * (img_x2[i*size.width+j] + img_y2[i*size.width+j]);
if (R[i*size.width+j] > Rmax)
{
Rmax = R[i*size.width+j];
}
//printf("%f\n",R[i*size.width+j]);
}
}
double max;
double T = 0.1 * Rmax;//固定阈值,当R(i, j) > T时,则被判定为候选角点
double *mx = new double[size.width*size.height];
//在计算完各点的值后,进行局部非极大值抑制
for (int i=1;i<size.height-1;i++)
{
for (int j=1;j<size.width-1;j++)
{
//写不下了,分两行。。。进行非极大抑制,窗口大小3*3
if (R[i*size.width+j]> T && R[i*size.width+j] > R[(i-1)*size.width+j-1] && R[i*size.width+j] > R[(i-1)*size.width+j] && R[i*size.width+j] >R[(i-1)*size.width+j+1] && R[i*size.width+j] >R[i*size.width+j-1])
{
if (R[i*size.width+j]>R[i*size.width+j+1]&&R[i*size.width+j]>R[(i+1)*size.width+j-1]&&R[i*size.width+j]>R[(i+1)*size.width+j]&&R[i*size.width+j]>R[(i+1)*size.width+j+1])
{
corner.data[i*size.width+j]=1;
}
}
}
}
//作图
Scalar sca(0,255,0);
for(int i = 0; i < size.height; i++)
{
for(int j = 0; j < size.width; j++)
{
if (corner.data[i*size.width+j] == 1)
{
Point p(j,i);
circle(img_src,p,20,sca);
}
}
}
imshow("find corner :)",img_src);
waitKey(0);
free(g);free(R);free(mx);
return 0;
}
运行效果图:
















 95
95











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









