






 本文探讨了动力定位船舶中的推力分配问题,涉及约束优化、能量损耗、机械磨损和船舶操纵性等。算法包括线性分配、伪逆法、序列二次规划和非线性分配,如使用拉格朗日乘子和群智能算法来优化推力分配,同时提及了针对特殊需求和物理限制的改进措施,如饱和问题的处理和奇异值分解的应用。
本文探讨了动力定位船舶中的推力分配问题,涉及约束优化、能量损耗、机械磨损和船舶操纵性等。算法包括线性分配、伪逆法、序列二次规划和非线性分配,如使用拉格朗日乘子和群智能算法来优化推力分配,同时提及了针对特殊需求和物理限制的改进措施,如饱和问题的处理和奇异值分解的应用。
1,推力分配存在的问题:推力极限、推力变化率极限、方位角变换率极限、机械磨损、禁区限制和奇异性等约束优化问题。
2,除了推力分配还需额外考虑的问题:
(1)能量损耗
(2)机械磨损
(3)船舶操纵性
3,动力定位船舶一般采用过驱系统,即将系统需求的合力指令合理地分配给各个推进器,故动力定位控制系统推力分配问题主要是约束优化问题,即在满足一定合力需求及推进器本身物理条件约束的同时,使功率消耗、机械磨损最小化,避免奇异性等。
4,推力分配问题约束条件可以分为
(1)期望控制力和力矩的等式约束条件
(2)推进器本身物理限制的约束条件。
5,
推力禁区:为了避免各个推进器之间的相互干扰,往往对各个推进器设置推力禁止产生的区域。
6,推力分配数学模型

7,
常见的推力分配算法:
(1)线性分配算法
1)
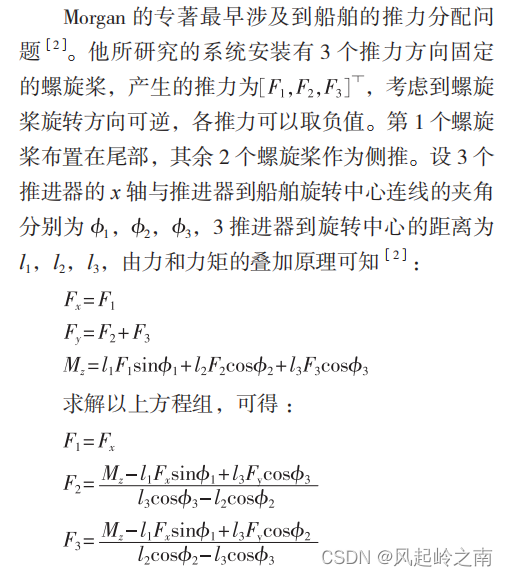
解线性方程组:最原始的分配算法。适合角度固定的推进器
【
Morgan J. 近海船舶的动力定位[M]. 耿惠彬,译 . 北
京 :国防工业出版社,1984 :188-201.
】
2)
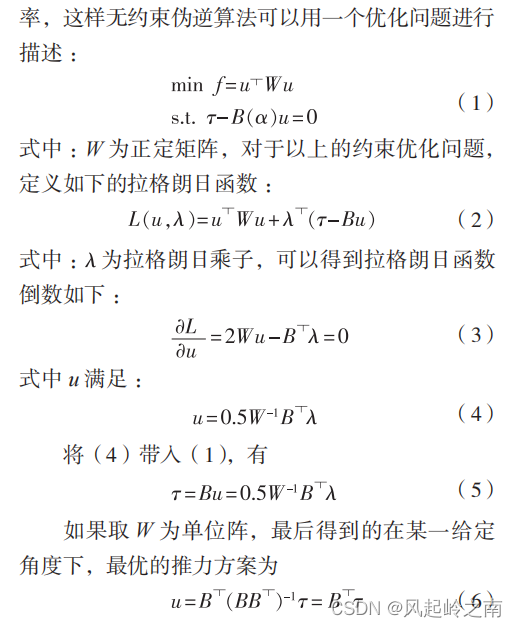
伪逆法
【[1]Ye B, Xiong J, Wang Q, et al. Design and implementation of pseudo-inverse thrust allocation algorithm for ship dynamic positioning[J]. IEEE Access, 2019(99): 1.
[2]Van Bui P, Kim Y B. Development of constrained control allocation for ship berthing by using autonomous tugboats[J]. Int. J.Control Autom. Syst., 2011, 9: 1203-1208.】
针对的对象:全回转推进器
优化目标:使用L2范数近似功率,作为优化目标。
方法:使用拉格朗日乘子法,求最优解。
特点:寻找的方案是能量最优的方案,求解简单,无任何约束,运用受限,求得的最优解可能不符合实际运用。
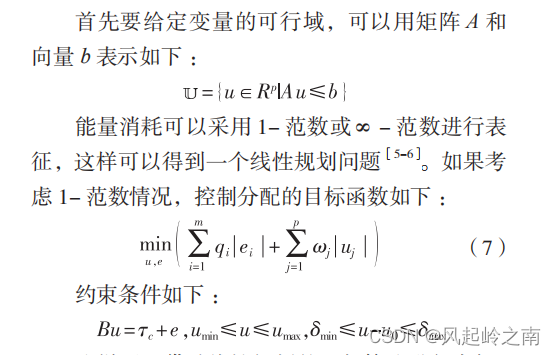
3)约束线性优化
针对伪逆法的不足,加入了饱和条件,给定变量的可行域,同时将误差(不一定能够找到使得控制器给的输入推力与推进器产生的推力相等的变量)纳入到目标函数中进行优化。
能量消耗使用1范数或无穷范数(转化成线性规划问题)
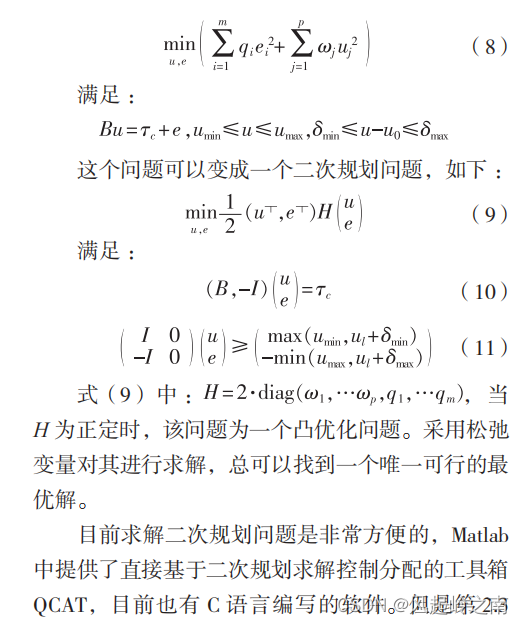
4)误差最优的线性二次规划法
目标函数中
能量消耗与误差均采用
L
2 范数进行描述,可以使用二次规划的方法求解
(2)非线性分配算法:目标函数和约束条件中含有非线性项。
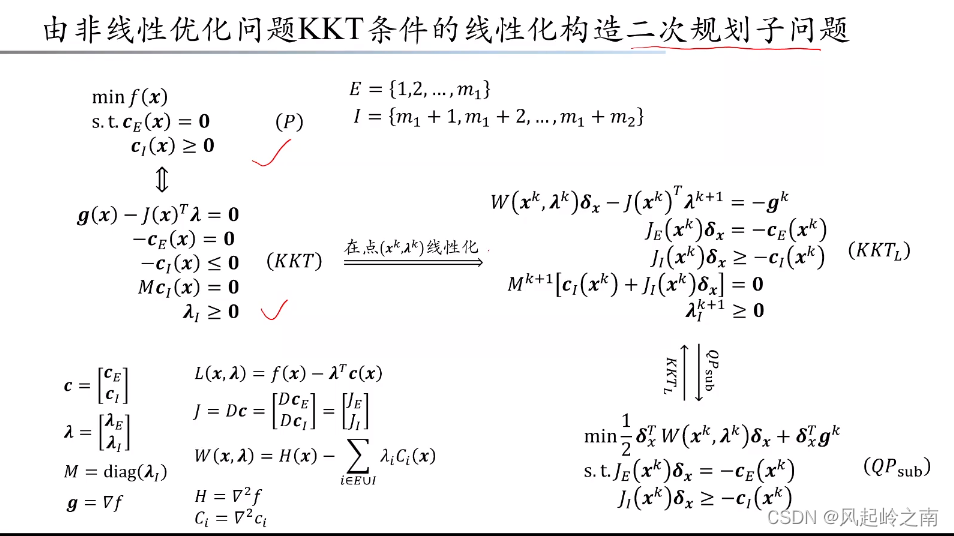
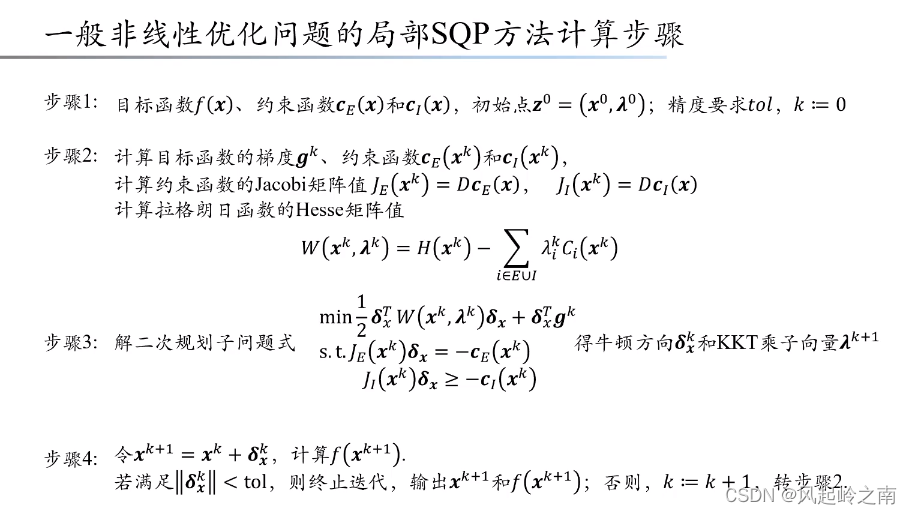
1)序列二次规划法
【Arditti F, Cozijn H, Van Daalen E, et al. Robust thrust allocation algorithm considering hydrodynamic interactions and actuator physical limitations[J]. J Mar Sci Technol, 2019, 24: 1057-1070.】
(对非凸函数,得到的可能是局部最优点,取不到全局最优点)
2)动态寻优法(对非凸函数,不一定有收敛的解)
3)智能分配算法(能处理非凸模型,计算量大,需离线计算)
8,
研究历史进程
(1)推进器分组法
Winchers 1998
:
多个推进器分成小组,
最后几组推力器往往得不到充分使用
。
【Wichers J, Bultema S, Matten R. Hydrodynamic research on and optiomizing dynamic positioning system of a deep water drilling vessel[C].
Proceedings of Offshore Technology Conference, 1998.】
(2)分配逻辑法 摩根 1978 【
Morgan, M J. Dynamic positioning of offshore vessels[M]. PPC Books Division, Petroleum Pub. Co., 1978.】
(3)考虑避免奇异性的序列二次规划法 【Johansen T A, Fossen T I, Berge S P. Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming[J]. IEEE Transactions on Control Systems Technology, 2004, 12 (1): 211-216.】
(4)提出一种解决伪逆法存在的饱和问题的方法 【李新飞,马强,袁利毫,作业型ROV矢量推进建模及推力分配方法[J].船舶力学,2020,24(3): 332-341.】
(5)设置推力分配禁区,避免尾流造成的推力损失 【[1]杨世知.DP推进系统水动力干扰及最优推力分配算法研究[D].上海:上海交通大学, 2010.
[2]吴显法,王言英.动力定位系统的推力分配策略研究[J].船海工程, 2008, 37(3): 92-96.
】
(6)组合偏置推力分配算法 【[1]施小成,魏玉石,宁继鹏,等,基于能量最优的组合偏置推力分配算法研究[J].中国造船, 2012, 53(2): 96-104.
[2]陈亚豪,徐海洋,李文娟,等.能量最优组合偏置推力分配算法[J].大连海事大学学报, 2019, 45(1): 26-32.】
(7)群智能算法 【梁海志,乔东生,李芦钰,等,基于遗传算法的半潜式平台动力定位系统动态约束可行域推力分配法[J].船舶力学,2018, 22(10): 1224-1232.】
群体智能优化算法是指以模仿大自然中生物群体(而非生物个体)所能表现出来的分工、协同合作行为机制为目标的仿生智能优化算法,常用的群体智能优化算法有粒子群算法、人工蜂群算法、细菌觅食算法等。
(8)针对特殊的推力需求,可利用监督与切换技术。【Larsen K E. Fuel-efficient control allocation for supply vessels[D]. Trondheim: Norwegian University of Science and Technology, 2012.】
(9)将奇异值分解法引入伪逆法中,对推力结构矩阵进行奇异值分解,避免产生奇异结构;Sordalen 1997 【Sørdalen. Optimal thrust allocation for marine vessels[J]. Control Engineering Practice, 1997,5 (9): 12231231.】
(10)针对全回转推进器在进行推力分配时,可能因物理限制存在推力饱和或角度饱和的问题,采用级联广义逆算法,对饱和的推力和角度进行截断处理,保证满足上层控制器的要求。徐海祥 2016
【徐海祥,付海军,殷进军,等,基于级联广义逆法的动力定位推力分配[J].武汉理工大学学报(交通科学与工程版),2016,40(02):206-209.】

















 600
600

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









