







 本文档详细介绍了如何编译相机SDK、安装OpenNI2以及下载ROS相关程序。首先,从远程仓库下载相机SDK并将其库文件拷贝到系统目录,然后编译SDK并验证是否成功。接着,下载并安装OpenNI2,解压并执行示例程序以检查相机连接。若遇到问题,需检查SDK与相机版本匹配。最后,下载ROS SDK,进行catkin_make,设置环境变量并启动相关launch文件。整个过程包括了相机SDK的编译、OpenNI2的安装及ROS程序的执行。
本文档详细介绍了如何编译相机SDK、安装OpenNI2以及下载ROS相关程序。首先,从远程仓库下载相机SDK并将其库文件拷贝到系统目录,然后编译SDK并验证是否成功。接着,下载并安装OpenNI2,解压并执行示例程序以检查相机连接。若遇到问题,需检查SDK与相机版本匹配。最后,下载ROS SDK,进行catkin_make,设置环境变量并启动相关launch文件。整个过程包括了相机SDK的编译、OpenNI2的安装及ROS程序的执行。
一.相机SDK编译
1.首先到远程仓库下载对应的相机SDK(注意你下载的目录路径在哪)
[https://github.com/percipioxyz/camport_ros](https://github.com/percipioxyz/camport_ros)
2. 将Camport3中的linux库文件拷贝到 user/lib目录下
cd camport3/lib/linux/lib_x64
sudo cp -fr * /usr/lib/
3.对相机的SDK进行编译下载sudo apt-get install build-essential
cd camport3/sample/
mkdir build
cd build/
cmake …
make -j8
4.检测sdk是否编译成功
cd camport3/sample/build/bin/
./SimpleView_FetchFrame
注:若能正常打开相机,则说明编译没问题,至此第一阶段完成
二.openNI2 SDK的下载安装
1.到远程仓库下载对应的SDK(注意你下载的目录路径在哪)
git clone https://gitee.com/jet_zou/camport3_openni2.git
2.解压缩对应的压缩包
1.进入到对应压缩包的目录
cd camport3_openni2/binary/
2.根据自己的系统解压缩对应的包(我的是64位)
sudo dpkg -i libopenni2-0_2.2.0.33+dfsg-4_amd64.deb
sudo dpkg -i libopenni2-dev_2.2.0.33+dfsg-4_amd64.deb
3.执行示例程序,看是否能正常连上相机
./SimpleRead_x64
注:如果连接相机失败,清查看相机的sdk和openni的sdk是否适配
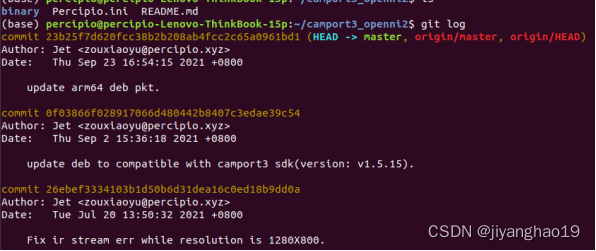
1. 通过log查看对应的相机对应的sdk版本
git log (找到openni2对应的相机sdk版本是1.5.15)
在这里插入图片描述
2.进入相机的sdk目录下,查看log
cd camport3/
git log
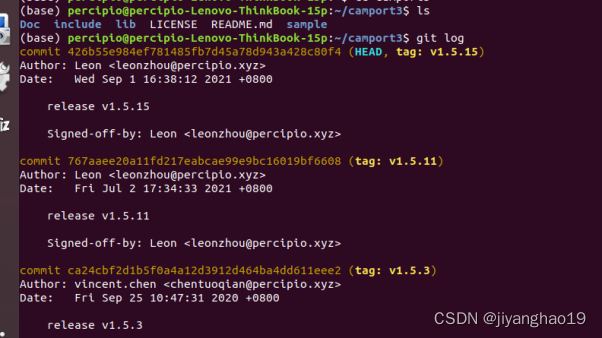
3..切换为当前适配的版本 sudo apt install gitlab-shell
git checkout 426b55e984ef781485fb7d45a78d943a428c80f4
4.把替换后的库拷贝到user/bin目录下
cd camport3/lib/linux/lib_x64/
sudo cp -fr * /usr/lib/
5.再次切换到 camport3_openni2/binary/目录下,执行程序
./SimpleRead_x64
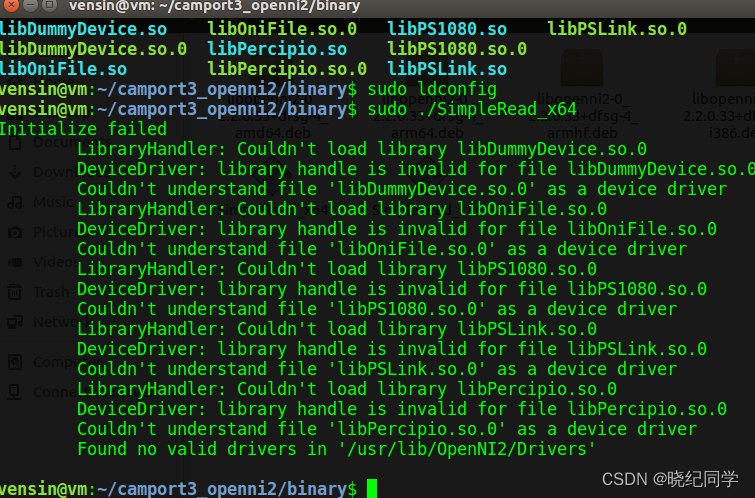
2、无法导入库错误(不是最新的sdk)
三.下载ROS SDK 以及ros程序
1、首先进入远程仓库下载 ros sdk(注意你下载的目录路径在哪)
git clone https://gitee.com/jet_zou/camport_ros.git
2、对ros程序进行下载 (详情请参考网址)
https://blog.csdn.net/wesigj/article/details/114688433?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_title~default-1.no_search_link&spm=1001.2101.3001.4242.2
3.执行程序
具体步骤如下(以下过程都是在ROS sdk目录前执行)
catkin_make
source ./devel/setup.bash
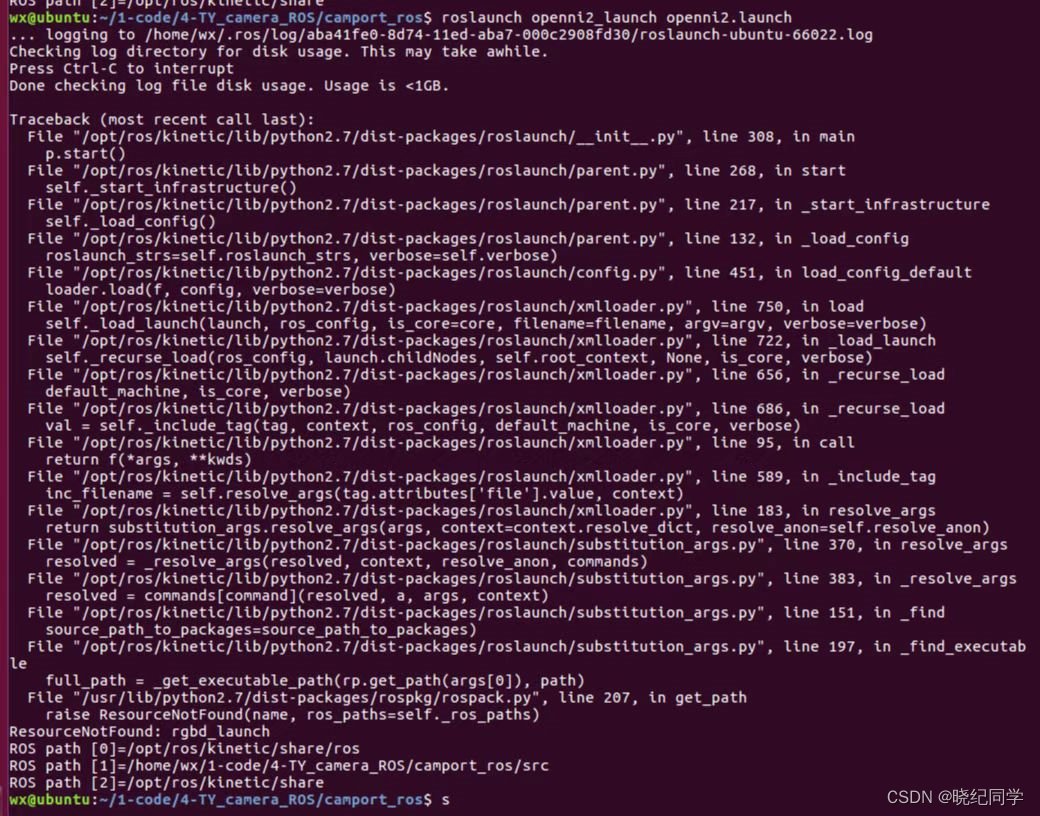
roslaunch openni2_launch openni2.launch
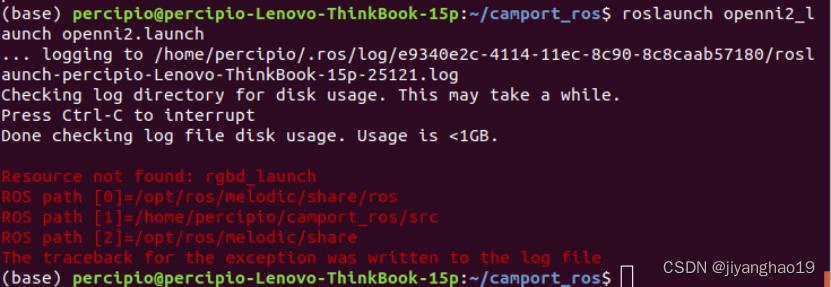
参考网址:https://blog.csdn.net/Hacker_MAI/article/details/108009916
18.04: sudo apt-get install ros-melodic-rgbd-launch
20.04: sudo apt-get install ros-noetic-rgbd-launch
Camera Resolution Set
sudo gedit /etc/openni2/Percipio.ini
再输入roslaunch openni2_launch openni2.launch
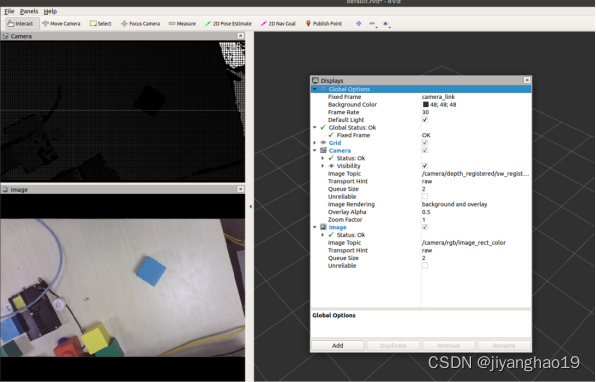
重新打开一个终端,输入
rosrun rviz rviz
终端打开后,将Fixed Frame 的值设为camera_link,然后将深度图和RGB图对齐
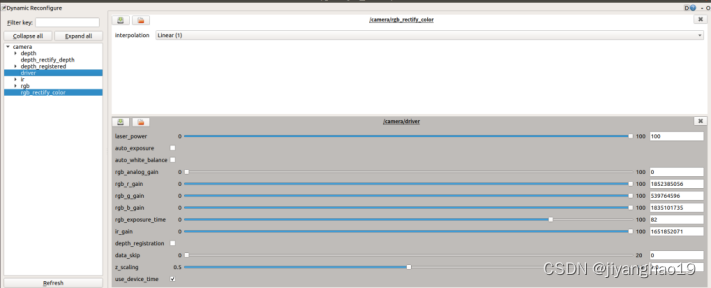
在命令行中输入 rosrun rqt_reconfigure rqt_reconfigure,即可对参数进行配置了
16.04问题:


















 1305
1305

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









