







目录
1.云拷贝
import open3d as o3d
if __name__ == "__main__":
# 1. pcd
print("Load a ply point cloud, print it, and render it")
sample_ply_data = o3d.data.PLYPointCloud()
pcd = o3d.io.read_point_cloud(sample_ply_data.path)
new_pcd = o3d.geometry.PointCloud(pcd)
o3d.visualization.draw([new_pcd])2.新建点云
import open3d as o3d
if __name__ == "__main__":
# 1. read pcd
# Compute ISS Keypoints on armadillo pointcloud.
armadillo_data = o3d.data.ArmadilloMesh()
mesh = o3d.io.read_triangle_mesh(armadillo_data.path)
new_pcd = o3d.geometry.PointCloud()
new_pcd.points = mesh.vertices
o3d.visualization.draw([new_pcd])3. 点云两点平均距离
import numpy as np
import open3d as o3d
import matplotlib.pyplot as plt
def get_best_distance_threshold(point_cloud):
"""
Calculates the best distance threshold value for a given point cloud.
可以检查是否存在异常值,一般认为超过两个标准差的数据,就是异常值。用这种方法确定异常值,一般要求数据服从正太分布。
加减三个标准差见的多些。包含至少99%的分布。俗称3 sigma event. 还有加减0.5标准差的,minimum difference.
Args:
point_cloud (open3d.geometry.PointCloud): Point cloud to calculate threshold for.
Returns:
float: Best distance threshold value. 两点距离。
"""
distances = point_cloud.compute_nearest_neighbor_distance() # 返回每个点的最近点之间的距离
mean_dist = np.mean(distances) # 所有两点距离的平均值
std_dist = np.std(distances) # 所有两点距离的标准差
threshold = mean_dist + 0.5 * std_dist
return threshold
if __name__ == '__main__':
sample_ply_data = o3d.data.PLYPointCloud()
pcd = o3d.io.read_point_cloud(sample_ply_data.path)
pcd.transform([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])
print(pcd)
o3d.visualization.draw([pcd])
d_threshold = get_best_distance_threshold(pcd) # 两点平均距离
print(d_threshold)
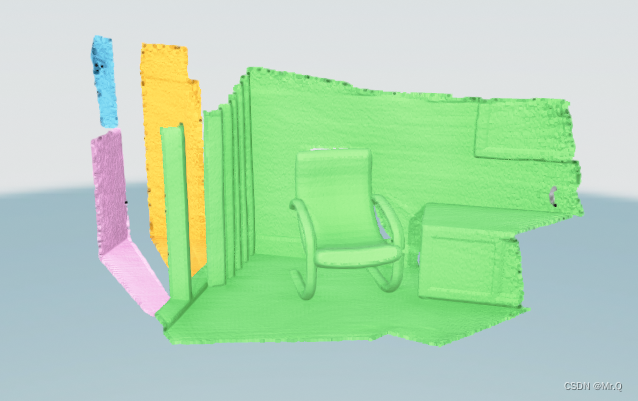
labels = np.array(pcd.cluster_dbscan(eps=d_threshold*3, min_points=10))
print(np.unique(labels))
# view
max_label = labels.max() # 最大的类别值
print(f"point cloud has {max_label + 1} clusters")
colors = plt.get_cmap("tab20")(labels / (max_label if max_label > 0 else 1))
colors[labels < 0] = 0 # 类别为0的,颜色设置为黑色
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3]) # ndarray to vector3d
o3d.visualization.draw([pcd])
待续。。。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











