







目录
点云数据
1 主成分分析
1.1 Method
对点云进行主成分分析(PCA)的方法主要有三个步骤:
(1)通过中心进行归一化:
(2)计算SVD或相关性:
(3)主向量是Ur的列向量。(X的特征向量=H的特征向量)。
1.2 Results
代码展示
def PCA(data, correlation=False, sort=True):
"""
Apply PCA to point cloud
Args:
data: point cloud, matrix of Nx3
correlation: use np.cov if False, otherwise np.corrcoef if True. default: False
sort: whether sort according to eigenvalues. default: True.
Returns:
eigenvalues
eigenvectors
"""
# 1. compute the covariance matrix
if correlation:
# each row represents a variable, and each column a single observation of all those variables.
cov_mat = np.corrcoef(data.T)
else:
cov_mat = np.cov(data.T)
# 2. apply svd to the covariance matrix
eigenvalues, eigenvectors = np.linalg.eig(cov_mat)
if sort:
sort = eigenvalues.argsort()[::-1]
eigenvalues = eigenvalues[sort]
eigenvectors = eigenvectors[:, sort]
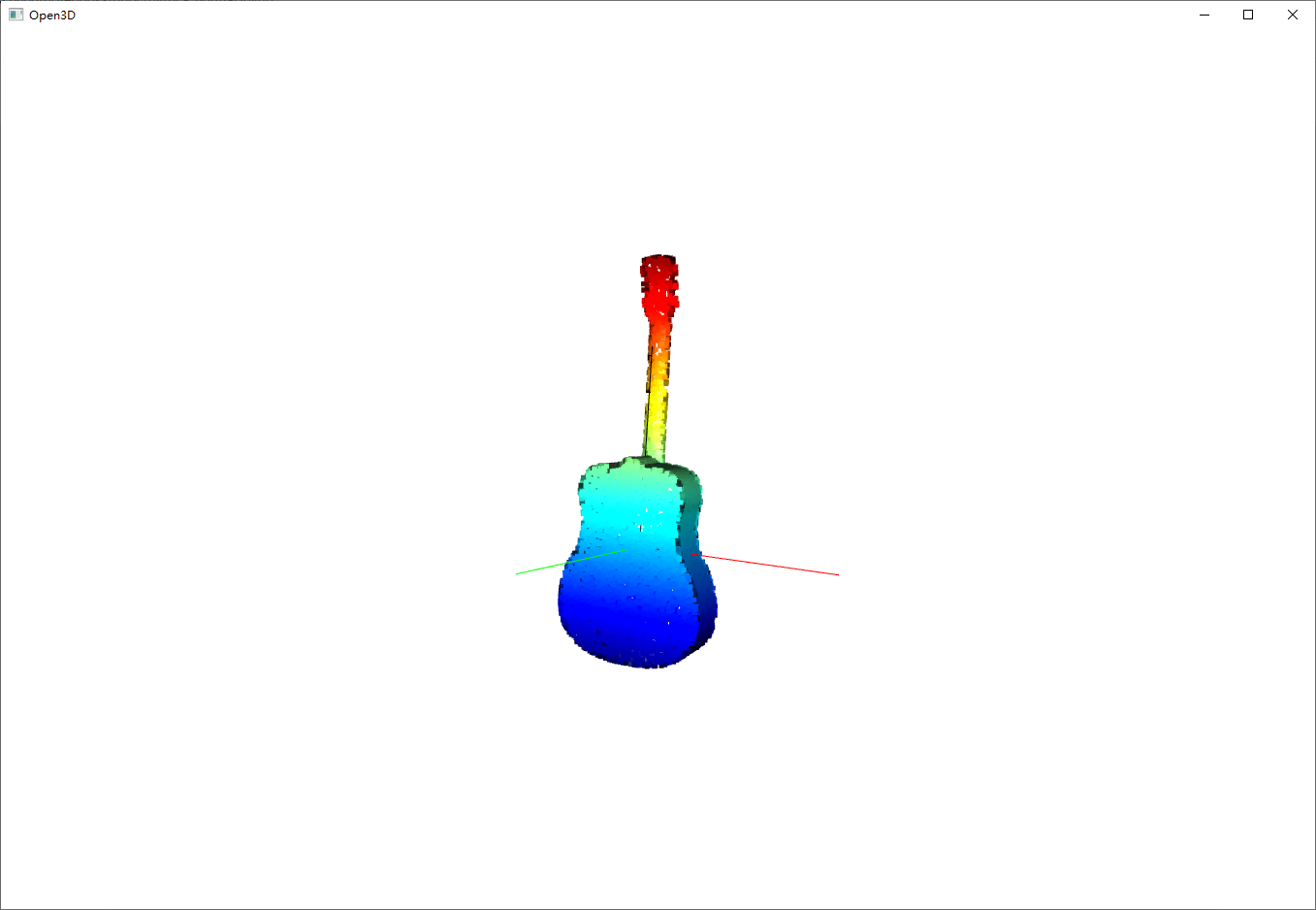
return eigenvalues, eigenvectors结果展示
主方向
投影

2 表面法线估计
2.1 Method
三维点云的表面法线估计方法主要有三个步骤。
对于任何一个点P:
(1)找到它的K最近的邻居,这些邻居定义了一个表面;
(2)对这些点应用PCA;
(3)P处的表面法线是PCA的最小特征值对应的特征向量。
2.2 Results
代码展示
# Implement PCA and Surface Normal, and validate them by the data of ModelNet40
import open3d as o3d
import os
import numpy as np
from pyntcloud import PyntCloud
# def standardize_data(arr):
# """
# This function standardize an array.
# Each column subtracts its mean value, and then divide its standard devision.
#
# param arr: array of point cloud
# return: standardized array
# """
# mean_arr, std_arr = np.mean(arr, axis=0), np.std(arr, axis=0)
# # print(f"before standardization, mean is {mean_arr} and std is {std_arr}")
# arr = (arr - mean_arr) / std_arr
# # print(f"after standardization, mean is {np.mean(arr, axis=0)} and std is {np.std(arr, axis=0)}")
# return arr
def PCA(data, correlation=False, sort=True):
"""
Apply PCA to point cloud
Args:
data: point cloud, matrix of Nx3
correlation: use np.cov if False, otherwise np.corrcoef if True. default: False
sort: whether sort according to eigenvalues. default: True.
Returns:
eigenvalues
eigenvectors
"""
# 1. compute the covariance matrix
if correlation:
# each row represents a variable, and each column a single observation of all those variables.
cov_mat = np.corrcoef(data.T)
else:
cov_mat = np.cov(data.T)
# 2. apply svd to the covariance matrix
eigenvalues, eigenvectors = np.linalg.eig(cov_mat)
if sort:
sort = eigenvalues.argsort()[::-1]
eigenvalues = eigenvalues[sort]
eigenvectors = eigenvectors[:, sort]
return eigenvalues, eigenvectors
def main():
# the names of 40 categories
with open('D:\\py\modelnet40_normal_resampled\\modelnet40_shape_names.txt') as f:
cates = f.readlines()
cates = ["guitar"]
for cate in cates:
point_cloud_pynt = PyntCloud.from_file(
'D:\\py\modelnet40_normal_resampled/{}/{}_0001.txt'.format(cate.strip(), cate.strip()), sep=",",
names=["x", "y", "z", "nx", "ny", "nz"])
# convert PyntCloud instance to open3d
point_cloud_o3d = point_cloud_pynt.to_instance("open3d", mesh=False)
# visualize the original point cloud
# o3d.visualization.draw_geometries([point_cloud_o3d])
# visualize the original point cloud with normal
# o3d.visualization.draw_geometries([point_cloud_o3d], point_show_normal=True)
# extract points from the PyntCloud object
points = point_cloud_pynt.xyz # {ndarray:(10000,3)}
print('total points number is:', points.shape[0])
# Apply PCA to point cloud
w, v = PCA(points)
point_cloud_vector = v[:, 0] # vectors of the principal component
print('the main orientation of this point cloud is: ', point_cloud_vector)
print('the second significant orientation of this point cloud is: ', v[:, 1])
# visualize three principal component axis
line_set = o3d.geometry.LineSet()
line_set.points = o3d.utility.Vector3dVector([np.mean(points, axis=0),
np.mean(points, axis=0) + v[:, 0],
np.mean(points, axis=0) + v[:, 1],
np.mean(points, axis=0) + v[:, 2]])
line_set.lines = o3d.utility.Vector2iVector([[0, 1], [0, 2], [0, 3]])
line_set.colors = o3d.utility.Vector3dVector([[0, 0, 0], [255, 0, 0], [0, 255, 0]]) # black, red, green
o3d.visualization.draw_geometries([point_cloud_o3d, line_set])
# Projection of point cloud on the plane of the first two principal components
# calculate the projection of point cloud on the least significant vector of PCA
least_pc = v[:, -1]
scalar_arr = np.dot(points, least_pc) / np.linalg.norm(least_pc, axis=0)**2
proj_on_least_pc = scalar_arr.reshape(scalar_arr.size, 1) * least_pc
# subtract the projection on the least pc from original points, to obtain the projection on the plane
projected_points = points - proj_on_least_pc
# visualize the projection
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(projected_points)
o3d.visualization.draw_geometries([pcd])
# Surface Normal Estimation
# calculate the KDTree from the point cloud
pcd_tree = o3d.geometry.KDTreeFlann(point_cloud_o3d)
normals = []
for point in points:
# for each point, find its 50-nearest neighbors
[_, idx, _] = pcd_tree.search_knn_vector_3d(point, knn=50)
w, v = PCA(points[idx])
# normal -> the least significant vector of PCA
normals.append(v[:, 2])
# visualize point cloud with surface normal
normals = np.array(normals, dtype=np.float64)
point_cloud_o3d.normals = o3d.utility.Vector3dVector(normals)
o3d.visualization.draw_geometries([point_cloud_o3d], point_show_normal=True)
if __name__ == '__main__':
main()结果展示

3 体素网格下采样
3.1 Method
对三维点云进行体素网格下采样的方法主要有六个步骤。
(1) 计算点集的最小或最大:
同理计算出
(2) 确定体素网格大小r。
(3) 计算体素网格的维度:

(4) 计算每个点的体素索引。
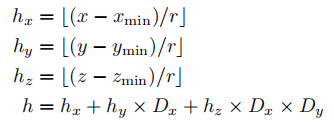
(5) 使用哈希函数将每个点映射到中的一个容器
。
(6) 迭代{G_1,G_2,...,G_M},得到M个点。
3.2 Results
代码展示
# Open3D: www.open3d.org
# The MIT License (MIT)
# See license file or visit www.open3d.org for details
import numpy as np
from open3d import *
if __name__ == "__main__":
print("Load a point cloud, print it, and render it")
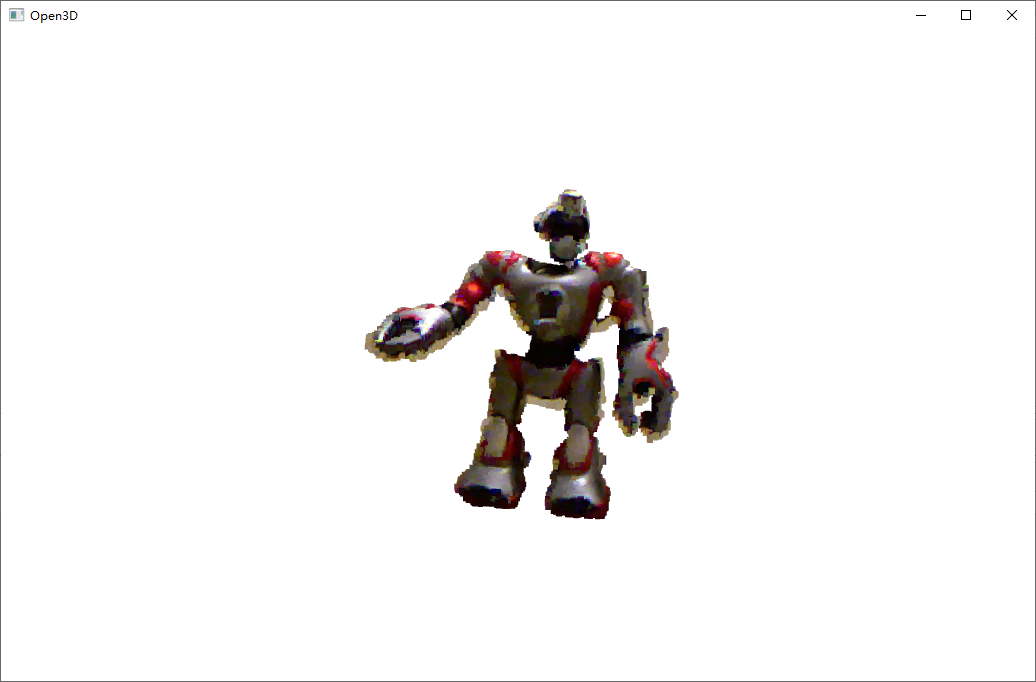
pcd = open3d.io.read_point_cloud("F:\\guoc\\pointcloud_tutorial-master\\data\\robot1.pcd")
print(pcd)
print(np.asarray(pcd.points))
open3d.visualization.draw_geometries([pcd])
print("Compute the normals of the downsampled point cloud")
downpcd = pcd.voxel_down_sample(voxel_size = 0.01)
downpcd.estimate_normals(search_param = open3d.geometry.KDTreeSearchParamHybrid(
radius = 0.03, max_nn = 30))
open3d.visualization.draw_geometries([downpcd])
print("")结果展示
原始点云
滤波后的点云

















 289
289











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











