






不同类型的传感器
自动化时代已经开始。我们现在使用的大多数东西都可以自动化。要设计自动化设备,首先我们需要了解传感器,这些是有助于在没有人工干预的情况下完成工作的模块/设备。即使是我们日常使用的手机或智能手机也会有一些传感器,如霍尔传感器、接近传感器、加速度计、触摸屏、麦克风等。这些传感器充当任何电气设备的眼睛、耳朵、鼻子,它感知外界的参数并向设备或微控制器提供读数。
什么是传感器?
传感器可以定义为一种设备,可用于感应/检测物理量,如力、压力、应变、光等,然后将其转换为所需的输出,如电信号,以测量施加的物理量。在少数情况下,仅靠传感器可能不足以分析获得的信号。在这些情况下,使用信号调节单元将传感器的输出电压电平保持在相对于我们使用的终端设备所需的范围内。
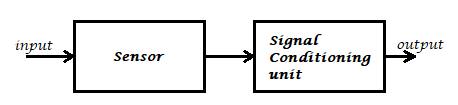
在信号调节单元中,传感器的输出可以被放大、过滤或修改为所需的输出电压。例如,如果我们考虑一个麦克风,它会检测到音频信号并转换为输出电压(以毫伏为单位),这变得难以驱动输出电路。因此,使用信号调节单元(放大器)来提高信号强度。但是,并非所有传感器(如光电二极管、LDR 等)都需要信号调节。
大多数传感器无法独立工作。因此,应对其施加足够的输入电压。各种传感器具有不同的工作范围,在使用它时应考虑这些范围,否则传感器可能会永久损坏。
传感器类型:
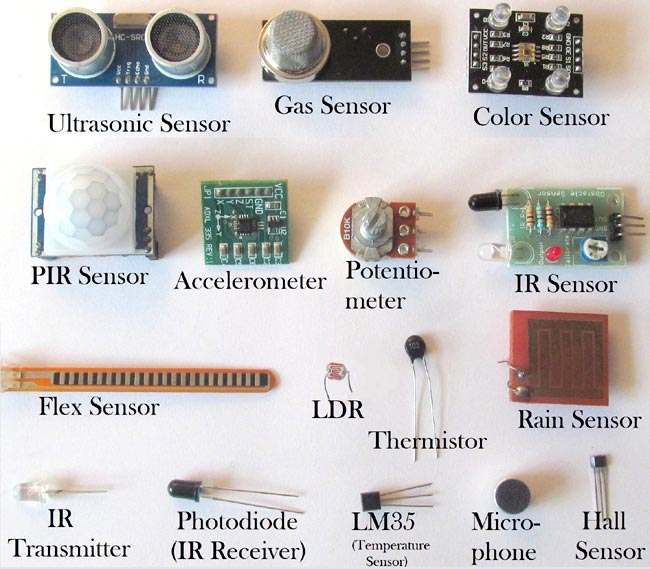
让我们看看市场上可用的各种不同类型的传感器,并讨论它们的功能、工作原理、应用等。我们将讨论各种传感器,例如:
- 光传感器
- 红外传感器 (IR 发射器 / IR LED)
- 光电二极管 (IR 接收器)
- Light Dependent Resistor
- 温度传感器
- 热敏电阻
- 热电偶
- 压力/力/重量传感器
- 应变片(压力传感器)
- 称重传感器(重量传感器)
- 位置传感器
- 电位计
- 编码器
- 霍尔传感器 (Detect Magnetic Field)
- Flex 传感器
- 声音传感器
- 麦克风
- 超声波传感器
- 触摸传感器
- PIR 传感器
- 倾斜传感器
- 加速度计
- 气体传感器
我们需要根据我们的项目或应用选择所需的传感器。如前所述,为了使它们工作,应根据其规格应用适当的电压。
现在让我们看看这些不同类型的传感器的工作原理,以及它可以在我们的日常生活或其应用中的哪些位置看到。
红外 LED:
它也被称为 IR 发射器。它用于发射红外线。这些频率的范围大于微波频率(即 >300GHz 到几百 THz)。红外 LED 产生的光线可以通过光电二极管感应,如下所述。这对 IR LED 和光电二极管称为 IR 传感器。以下是 IR 传感器的工作原理。

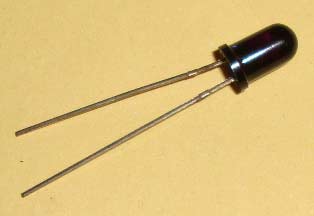
光电二极管(光传感器):
它是一种半导体器件,用于检测光线,主要用作红外接收器。它的结构类似于普通的 PN 结二极管,但工作原理与它不同。众所周知,PN 结在反向偏置时允许较小的泄漏电流,因此,此特性用于检测光线。光电二极管的构造使光线应落在 PN 结上,这使得泄漏电流根据我们施加的光的强度而增加。因此,通过这种方式,可以使用光电二极管来感应光线并保持通过电路的电流。在此处检查带 IR 传感器的光电二极管的工作原理。
使用光电二极管,我们可以构建一个基本的自动路灯,当阳光强度降低时,它会发光。但是即使有少量光线照射到光电二极管上也能正常工作,因此应小心。
LDR (Light Dependent Resistor) (光敏电阻器):
顾名思义,指定 resistor 的 it 取决于光的强度。它的工作原理是光电导性,即光的传导。它通常由硫化镉制成。当光落在 LDR 上时,它的电阻会降低并起到类似于导体的作用,当没有光落在 LDR 上时,它的电阻几乎在 MΩ 范围内,或者理想情况下它充当开路。 LDR 应该考虑的一个注意事项是,如果光线没有完全聚焦在其表面上,它不会响应。
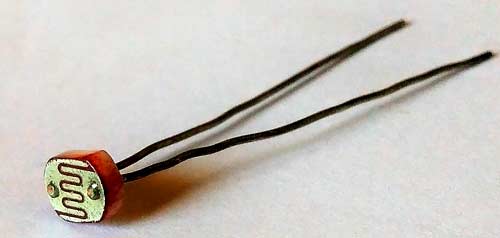
通过使用晶体管的适当电路,它可以用来检测光的可用性。用 LDR 代替 R2(基极和发射极之间的电阻器)的分压器偏置晶体管可以用作光检测器。在此处查看基于 LDR 的各种电路。
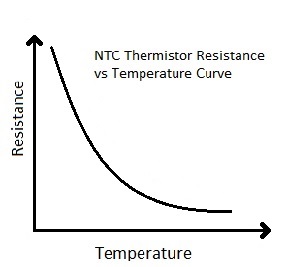
热敏电阻 (温度传感器):
热敏电阻可用于检测温度变化。它具有负温度系数,这意味着当温度升高时,电阻会减小。因此,热敏电阻的电阻可以随着温度的升高而变化,这会导致更多的电流流过它。电流的这种变化可用于确定温度的变化量。热敏电阻的一个应用是,它用于检测温度升高并控制晶体管电路中的泄漏电流,这有助于保持其稳定性。这是 Thermistor 自动控制直流风扇的一个简单应用程序。

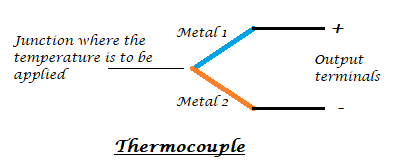
热电偶(温度传感器):
另一个可以检测温度变化的元件是热电偶。在其结构中,两种不同的金属连接在一起形成一个液络部。其主要原理是,当两种不同金属的液络部被加热或暴露在高温下时,其端子上的电位会发生变化。因此,变化的电位可以进一步用于测量温度变化的量。
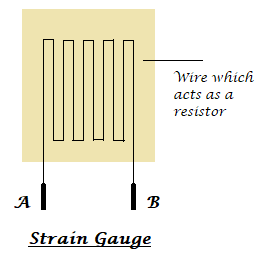
应变片(压力/力传感器):
应变片用于检测施加负载时的压力。它的工作原理是电阻,我们知道电阻与导线的长度成正比,与其横截面积成反比 (R=ρl/a)。这里也可以使用相同的原理来测量负载。在柔性板上,电线以锯齿形方式排列,如下图所示。因此,当压力施加到该特定电路板上时,它会沿一个方向弯曲,从而导致导线的总长度和横截面积发生变化。这会导致导线电阻发生变化。这样获得的电阻非常小(几欧姆),这可以在惠斯通电桥的帮助下确定。应变片放置在电桥的四个臂之一中,其余值保持不变。因此,当施加压力时,随着电阻的变化,通过电桥的电流会发生变化,并且可以计算压力。
应变计主要用于计算飞机机翼可以承受的压力量,也用于测量特定道路上允许的车辆数量等。
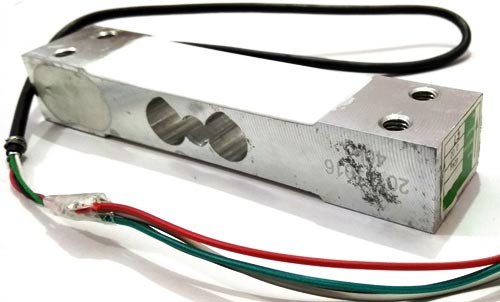
称重传感器(重量传感器):
称重传感器类似于应变计,它测量力等物理量并以电信号的形式提供输出。当对称重传感器施加一些张力时,其结构会发生变化,从而导致电阻发生变化,最后,可以使用惠斯通电桥校准其值。这是有关如何使用称重传感器测量体重的项目。
电位计:
电位计用于检测位置。它通常有各种范围的电阻器连接到开关的不同极。电位计可以是旋转型或线性型。旋转式时,将修光刃连接到可旋转的长轴上。当轴旋转时,游标的位置会发生变化,因此合成电阻会发生变化,从而导致输出电压发生变化。因此,可以校准输出以检测其位置的变化。

编码器:
为了检测位置的变化,还可以使用编码器。它具有圆形可旋转的圆盘状结构,中间有特定的开口,因此当红外线或光线穿过它时,只有少数光线被检测到。此外,这些光线被编码为代表特定位置的数字数据(以二进制为单位)。

霍尔传感器:
名称本身表明它是用于霍尔效应的传感器。它可以定义为当磁场靠近载流导体(垂直于电场方向)时,会在给定导体上产生电位差。利用这一特性,霍尔传感器用于检测磁场,并以电压形式提供输出。应注意霍尔传感器只能检测到磁体的一个磁极。

霍尔传感器用于少数智能手机,当翻盖(其中有磁铁)关闭屏幕时,霍尔传感器有助于关闭屏幕。这是霍尔效应传感器在门警报器中的一个实际应用。
Flex 传感器:
FLEX 传感器是一种传感器,当其形状发生变化或弯曲时,其电阻会发生变化。FLEX 传感器长 2.2 英寸或手指长。如图所示。简单地说,当传感器端子弯曲时,电阻会增加。除非我们能读懂它们,否则这种阻力的变化不会有任何好处。手头的控制器只能读取电压的变化,仅此而已,为此,我们将使用分压器电路,这样我们可以将电阻变化推导出为电压变化。在此处了解如何使用 Flex Sensor。

麦克风(声音传感器):
麦克风可以在所有智能手机或手机上看到。它可以检测音频信号并将其转换为小电压 (mV) 电信号。麦克风可以有多种类型,如电容式麦克风、水晶麦克风、碳麦克风等,每种类型的麦克风分别取决于电容、压电效应、电阻等特性。让我们看看一个晶体麦克风的工作原理,它的作用是压电效应。使用双晶片晶体,在压力或振动下产生成比例的交流电压。振膜通过驱动销连接到晶体上,因此当声音信号撞击振膜时,它会来回移动,这种运动会改变驱动销的位置,从而导致晶体振动,从而产生相对于施加的声音信号的交流电压。获得的电压被馈送到放大器,以增加信号的整体强度。以下是基于 Microphone 的各种电路。

您还可以使用一些微控制器(如 Arduino)以分贝为单位转换 Microphone 值。
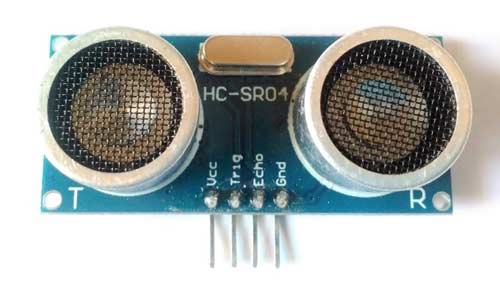
超声波传感器:
超声波只是指频率范围。它的范围大于可听范围 (>20 kHz),因此即使它打开,我们也无法感应到这些声音信号。只有特定的扬声器和接收器才能感应到这些超声波。该超声波传感器用于计算超声波发射器与目标之间的距离,也用于测量目标的速度。
超声波传感器 HC-SR04 可用于测量 2cm-400cm 范围内的距离,精度为 3mm。让我们看看这个模块是如何工作的。当我们将“触发”引脚设置为高约 10us 时,HCSR04 模块会在超声波范围内产生声音振动,这将以声速发送 8 周期的声波爆发,撞击物体后,它将被 Echo 引脚接收。根据声音振动恢复所需的时间,它提供适当的脉冲输出。我们可以根据超声波返回传感器所需的时间来计算物体的距离。在此处了解有关超声波传感器的更多信息。
超声波传感器有许多应用。我们可以利用它来避开自动驾驶汽车、移动机器人等的障碍物。雷达将使用相同的原理来检测入侵者导弹和飞机。蚊子可以感应超声波。因此,超声波可以用作驱蚊剂。
触摸传感器:
在这一代人中,我们可以说几乎所有人都在使用具有宽屏的智能手机,该屏幕也可以感应到我们的触摸。那么,让我们看看这个触摸屏是如何工作的。基本上,有两种类型的触摸传感器,一种是基于电阻的触摸屏,另一种是基于电容的触摸屏。让我们简要了解一下这些传感器的工作原理。
电阻式触摸屏的底部有一个电阻片,屏幕下方有一个导电片,这两者都由一个气隙隔开,并在片材上施加一个小电压。当我们按下或触摸屏幕时,导电片在该点接触电阻片,导致电流在该特定点流动,软件会感应到位置并执行相关操作。
而电容式触摸作用于我们身体上可用的静电荷。屏幕已经带满了全电场。当我们触摸屏幕时,由于流经我们身体的静电荷而形成闭合电路。此外,软件决定位置和要执行的操作。我们可以观察到,戴上手套时电容式触摸屏不会工作,因为手指和屏幕之间不会导电。
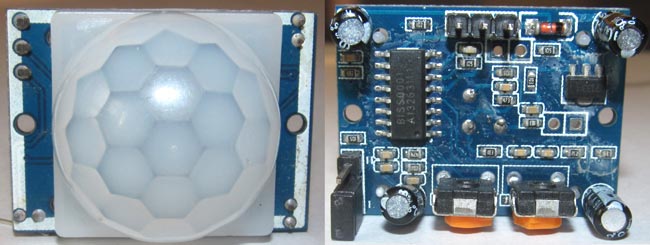
PIR 传感器:
PIR 传感器代表被动红外传感器。这些用于检测人、动物或事物的运动。我们知道红外线具有反射特性。当红外线照射到物体上时,根据目标的温度,红外线特性会发生变化,这个接收到的信号决定了物体或生物的运动。即使物体的形状发生变化,反射红外线的特性也可以精确区分物体。这是完整的工作传感器或 PIR 传感器。
加速度计(倾斜传感器):
加速度计传感器可以感应其在特定方向上的倾斜或移动。它基于地球引力引起的加速力工作。它微小的内部部分非常敏感,以至于它们会对位置的微小外部变化做出反应。它有一个压电晶体,当倾斜时会在晶体中引起干扰并产生电位,从而确定相对于 X、Y 和 Z 轴的精确位置。
这些在手机和笔记本电脑中很常见,以避免处理器引线断裂。当设备掉落时,加速度计会检测到掉落情况并根据软件执行相应的操作。以下是一些使用 Accelerometer 的项目。
气体传感器:
在工业应用中,气体传感器在检测气体泄漏方面起着重要作用。如果这些区域没有安装此类设备,最终会导致令人难以置信的灾难。这些气体传感器根据要检测的气体类型分为各种类型。让我们看看这个传感器是如何工作的。在金属板下方有一个传感元件,该元件连接到施加电流的端子。当气体颗粒撞击传感元件时,会导致化学反应,使得元件的电阻发生变化,通过它的电流也会发生变化,最终可以检测到气体。

所以最后,我们可以得出结论,传感器不仅用于使我们的工作变得简单,以测量物理量,使设备自动化,而且还用于帮助生物应对灾难。
















 2660
2660

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











