







这篇博文来推导一下旋转矩阵。
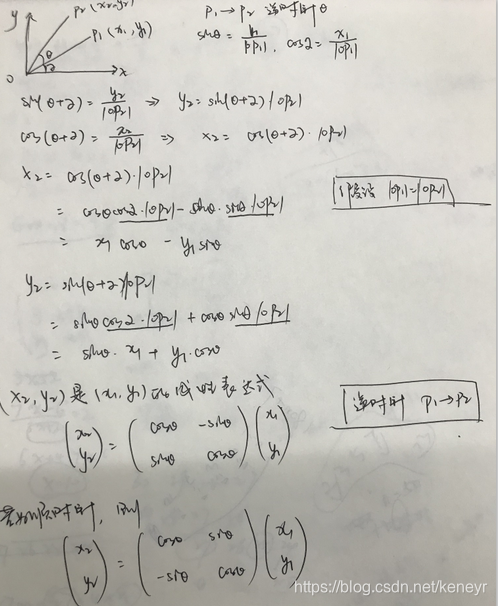
首先来假设 OP1旋转到了OP2,逆时针矩阵推导。当然也有顺时针矩阵推导。
然后有没有什么办法可以不考虑顺时针逆时针?这里我考虑了一下OP1和OP2不相等的情况
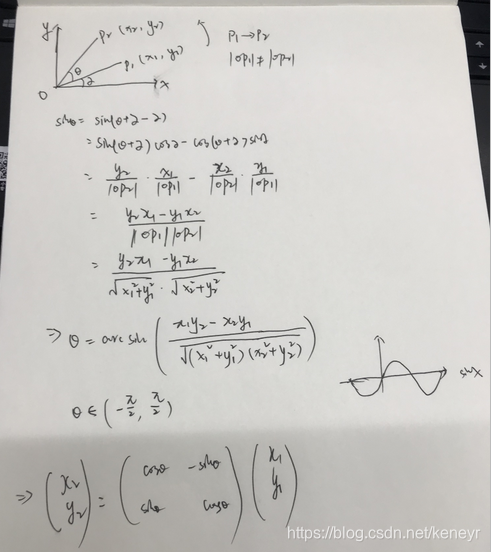
因为先求的sin(theta),如果是逆时针,theta就是正值,如果是顺时针,theta就是负值。
之前我的想法,求theta,是先根据三角形的边长求夹角的公式求的cos(theta),然后sin(theta)就根据sqrt求。这种情况,必须提前判断逆时针旋转还是顺时针旋转,然后更改旋转矩阵。非常麻烦,也容易出错。
现在的想法,因为求的是sin(theta),sin(theta)的值就含有了顺时针还是逆时针的信息了。哈哈哈哈哈哈哈哈。
感谢大佬不吝赐教~


















 290
290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











