







 本文详细介绍了摄像机成像模型,包括投影成像过程和摄像机内参矩阵,强调了焦距与像素的关系。接着讨论了实际成像中存在的畸变问题,如径向和切向形变,并给出了OpenCV中的畸变系数表示。最后,阐述了畸变校正的方法,包括坐标映射和插值处理。
本文详细介绍了摄像机成像模型,包括投影成像过程和摄像机内参矩阵,强调了焦距与像素的关系。接着讨论了实际成像中存在的畸变问题,如径向和切向形变,并给出了OpenCV中的畸变系数表示。最后,阐述了畸变校正的方法,包括坐标映射和插值处理。
一 摄像机成像模型
成像的过程实质上是几个坐标系的转换。首先空间中的一点由世界坐标系转换到摄像机坐标系,然后再将其投影到成像平面(摄像机的CCD),最后再将成像平面上的数据转换到图像平面(最后生成的图像)。
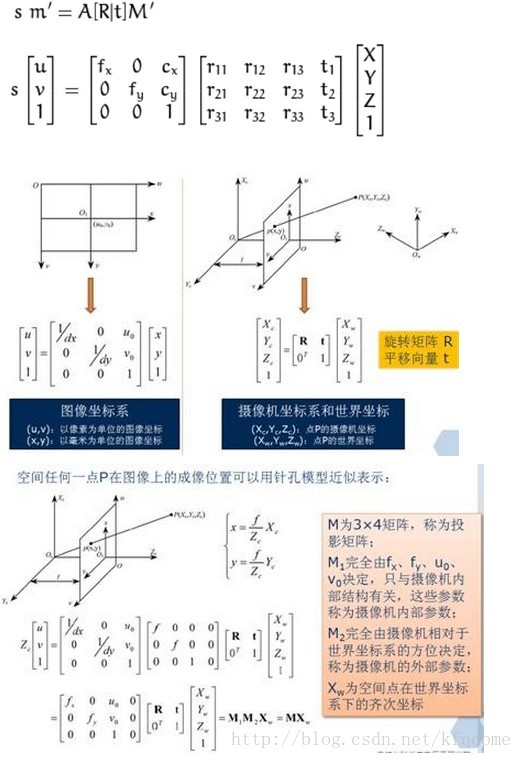
图1-1
世界空间内的一个点在图像上成像的过程称为投影成像过程,这中间转换过程构成的矩阵M称为投影矩阵。
摄像机的畸变参数与相机成像时采用的分辨率无关,而fx,fy和光心位置cx,cy与分辨率有关,但是成倍数关系,例如在分辨率320×240分辨率标定得到内参数为fx0,fy0,cx0,cy0,那么在分辨率640×480下对应的参数则为2fx0,2fy0,2cx0,2cy0。
上面这些参数中,f,t所采用的量纲都是mm,而dx和dy指的是每个像素个数的大小,即mm/pixel,那么经过换算最后得到的u、v的量纲自然也就是像素。fx和fy是由f/dx,f/dy计算而来,表示的是长度值为f时对应的像素个数,也即长度值为f(mm)时,在图像平面的x方向和y方向的像素个数,fx、fy、u0、v0构成A,A右边的数据为[R|t]M’,看起来[R|t]M’对应的数据的量纲好像是mm,因为M’和t的量纲都是mm,这样A里面的量纲又为像素,这样乘起来的量纲就是mm*pixel了,这显然不对。但是事实情况并不是真的这样,最后[R|t]M’与A相乘的时候,[R|t]M’的结果是需要进行归一化的,即[xc yc zc 1] →[xc/zc yc/zc 1],这个时候它的量纲其实就只是倍数了
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 484
484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









