









前面我们没有讲程序的结构,我想有些童鞋可能迫不及待想知道CUDA程序到底是怎么一个执行过程。好的,这一节在介绍流之前,先把CUDA程序结构简要说一下。
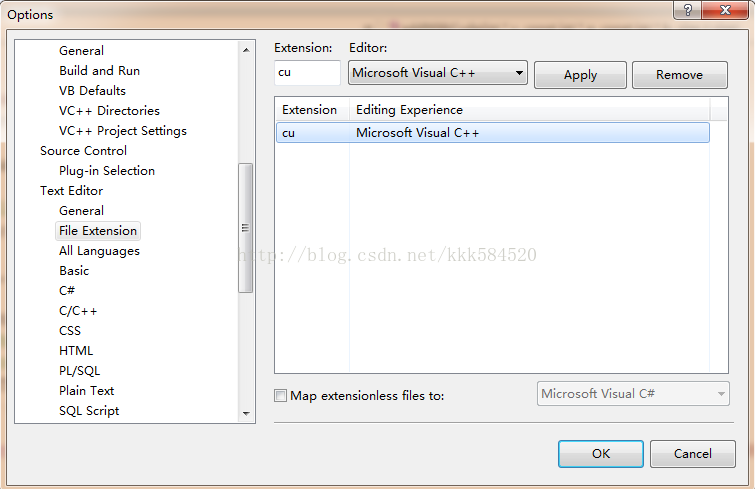
CUDA程序文件后缀为.cu,有些编译器可能不认识这个后缀的文件,我们可以在VS2008的Tools->Options->Text Editor->File Extension里添加cu后缀到VC++中,如下图:
一个.cu文件内既包含CPU程序(称为主机程序),也包含GPU程序(称为设备程序)。如何区分主机程序和设备程序?根据声明,凡是挂有“__global__”或者“__device__”前缀的函数,都是在GPU上运行的设备程序,不同的是__global__设备程序可被主机程序调用,而__device__设备程序则只能被设备程序调用。
没有挂任何前缀的函数,都是主机程序。主机程序显示声明可以用__host__前缀。设备程序需要由NVCC进行编译,而主机程序只需要由主机编译器(如VS2008中的cl.exe,Linux上的GCC)。主机程序主要完成设备环境初始化,数据传输等必备过程,设备程序只负责计算。
主机程序中,有一些“cuda”打头的函数,这些都是CUDA Runtime API,即运行时函数,主要负责完成设备的初始化、内存分配、内存拷贝等任务。我们前面第三节用到的函数cudaGetDeviceCount(),cudaGetDeviceProperties(),cudaSetDevice()都是运行时API。这些函数的具体参数声明我们不必一一记下来,拿出第三节的官方利器就可以轻松查询,让我们打开这个文件:
打开后,在pdf搜索栏中输入一个运行时函数,例如cudaMemcpy,查到的结果如下:
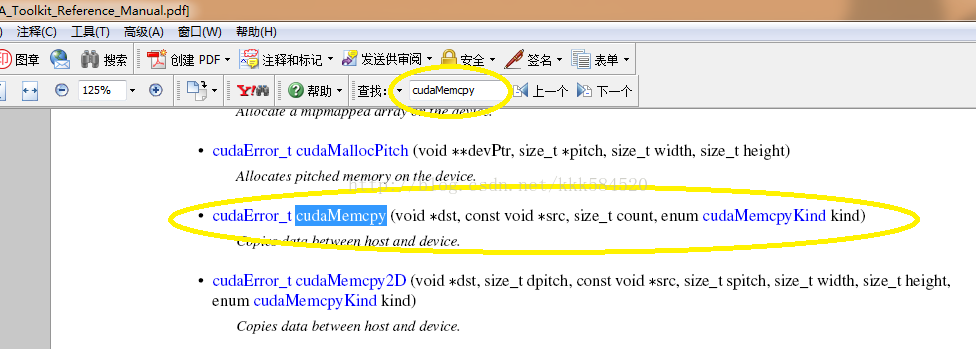
可以看到,该API函数的参数形式为,第一个表示目的地,第二个表示来源地,第三个参数表示字节数,第四个表示类型。如果对类型不了解,直接点击超链接,得到详细解释如下:
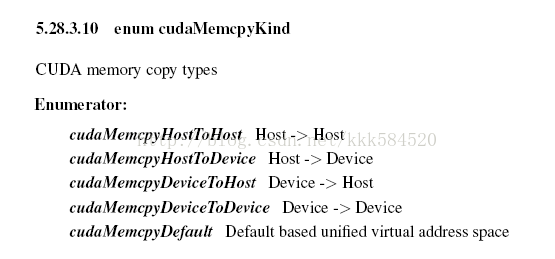
可见,该API可以实现从主机到主机、主机到设备、设备到主机、设备到设备的内存拷贝过程。同时可以发现,利用该API手册可以很方便地查询我们需要用的这些API函数,所以以后编CUDA程序一定要把它打开,随时准备查询,这样可以大大提高编程效率。
好了,进入今天的主题:流并行。
前面已经介绍了线程并行和块并行,知道了线程并行为细粒度的并行,而块并行为粗粒度的并行,同时也知道了CUDA的线程组织情况,即Grid-Block-Thread结构。一组线程并行处理可以组织为一个block,而一组block并行处理可以组织为一个Grid,很自然地想到,Grid只是一个网格,我们是否可以利用多个网格来完成并行处理呢?答案就是利用流。
流可以实现在一个设备上运行多个核函数。前面的块并行也好,线程并行也好,运行的核函数都是相同的(代码一样,传递参数也一样)。而流并行,可以执行不同的核函数,也可以实现对同一个核函数传递不同的参数,实现任务级别的并行。
CUDA中的流用cudaStream_t类型实现,用到的API有以下几个:cudaStreamCreate(cudaStream_t * s)用于创建流,cudaStreamDestroy(cudaStream_t s)用于销毁流,cudaStreamSynchronize()用于单个流同步,cudaDeviceSynchronize()用于整个设备上的所有流同步,cudaStreamQuery()用于查询一个流的任务是否已经完成。具体的含义可以查询API手册。
下面我们将前面的两个例子中的任务改用流实现,仍然是{1,2,3,4,5}+{10,20,30,40,50} = {11,22,33,44,55}这个例子。代码如下:
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
cudaError_t addWithCuda(int *c, const int *a, const int *b, size_t size);
__global__ void addKernel(int *c, const int *a, const int *b)
{
int i = blockIdx.x;
c[i] = a[i] + b[i];
}
int main()
{
const int arraySize = 5;
const int a[arraySize] = { 1, 2, 3, 4, 5 };
const int b[arraySize] = { 10, 20, 30, 40, 50 };
int c[arraySize] = { 0 };
// Add vectors in parallel.
cudaError_t cudaStatus;
int num = 0;
cudaDeviceProp prop;
cudaStatus = cudaGetDeviceCount(&num);
for(int i = 0;i<num;i++)
{
cudaGetDeviceProperties(&prop,i);
}
cudaStatus = addWithCuda(c, a, b, arraySize);
if (cudaStatus != cudaSuccess)
{
fprintf(stderr, "addWithCuda failed!");
return 1;
}
printf("{1,2,3,4,5} + {10,20,30,40,50} = {%d,%d,%d,%d,%d}\n",c[0],c[1],c[2],c[3],c[4]);
// cudaThreadExit must be called before exiting in order for profiling and
// tracing tools such as Nsight and Visual Profiler to show complete traces.
cudaStatus = cudaThreadExit();
if (cudaStatus != cudaSuccess)
{
fprintf(stderr, "cudaThreadExit failed!");
return 1;
}
return 0;
}
// Helper function for using CUDA to add vectors in parallel.
cudaError_t addWithCuda(int *c, const int *a, const int *b, size_t size)
{
int *dev_a = 0;
int *dev_b = 0;
int *dev_c = 0;
cudaError_t cudaStatus;
// Choose which GPU to run on, change this on a multi-GPU system.
cudaStatus = cudaSetDevice(0);
if (cudaStatus != cudaSuccess)
{
fprintf(stderr, "cudaSetDevice failed! Do you have a CUDA-capable GPU installed?");
goto Error;
}
// Allocate GPU buffers for three vectors (two input, one output) .
cudaStatus = cudaMalloc((void**)&dev_c, size * sizeof(int));
if (cudaStatus != cudaSuccess)
{
fprintf(stderr, "cudaMalloc failed!");
goto Error;
}
cudaStatus = cudaMalloc((void**)&dev_a, size * sizeof(int));
if (cudaStatus != cudaSuccess)
{
fprintf(stderr, "cudaMalloc failed!");
goto Error;
}
cudaStatus = cudaMalloc((void**)&dev_b, size * sizeof(int));
if (cudaStatus != cudaSuccess)
{
fprintf(stderr, "cudaMalloc failed!");
goto Error;
}
// Copy input vectors from host memory to GPU buffers.
cudaStatus = cudaMemcpy(dev_a, a, size * sizeof(int), cudaMemcpyHostToDevice);
if (cudaStatus != cudaSuccess)
{
fprintf(stderr, "cudaMemcpy failed!");
goto Error;
}
cudaStatus = cudaMemcpy(dev_b, b, size * sizeof(int), cudaMemcpyHostToDevice);
if (cudaStatus != cudaSuccess)
{
fprintf(stderr, "cudaMemcpy failed!");
goto Error;
}
cudaStream_t stream[5];
for(int i = 0;i<5;i++)
{
cudaStreamCreate(&stream[i]); //创建流
}
// Launch a kernel on the GPU with one thread for each element.
for(int i = 0;i<5;i++)
{
addKernel<<<1,1,0,stream[i]>>>(dev_c+i, dev_a+i, dev_b+i); //执行流
}
cudaDeviceSynchronize();
// cudaThreadSynchronize waits for the kernel to finish, and returns
// any errors encountered during the launch.
cudaStatus = cudaThreadSynchronize();
if (cudaStatus != cudaSuccess)
{
fprintf(stderr, "cudaThreadSynchronize returned error code %d after launching addKernel!\n", cudaStatus);
goto Error;
}
// Copy output vector from GPU buffer to host memory.
cudaStatus = cudaMemcpy(c, dev_c, size * sizeof(int), cudaMemcpyDeviceToHost);
if (cudaStatus != cudaSuccess)
{
fprintf(stderr, "cudaMemcpy failed!");
goto Error;
}
Error:
for(int i = 0;i<5;i++)
{
cudaStreamDestroy(stream[i]); //销毁流
}
cudaFree(dev_c);
cudaFree(dev_a);
cudaFree(dev_b);
return cudaStatus;
}
注意到,我们的核函数代码仍然和块并行的版本一样,只是在调用时做了改变,<<<>>>中的参数多了两个,其中前两个和块并行、线程并行中的意义相同,仍然是线程块数(这里为1)、每个线程块中线程数(这里也是1)。第三个为0表示每个block用到的共享内存大小,这个我们后面再讲;第四个为流对象,表示当前核函数在哪个流上运行。我们创建了5个流,每个流上都装载了一个核函数,同时传递参数有些不同,也就是每个核函数作用的对象也不同。这样就实现了任务级别的并行,当我们有几个互不相关的任务时,可以写多个核函数,资源允许的情况下,我们将这些核函数装载到不同流上,然后执行,这样可以实现更粗粒度的并行。
好了,流并行就这么简单,我们处理任务时,可以根据需要,选择最适合的并行方式。















 3242
3242

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









