







本质矩阵和基础矩阵都是3X3的矩阵。
本质矩阵是一个齐次矩阵,秩为2,自由度为5
本质矩阵的推导过程:
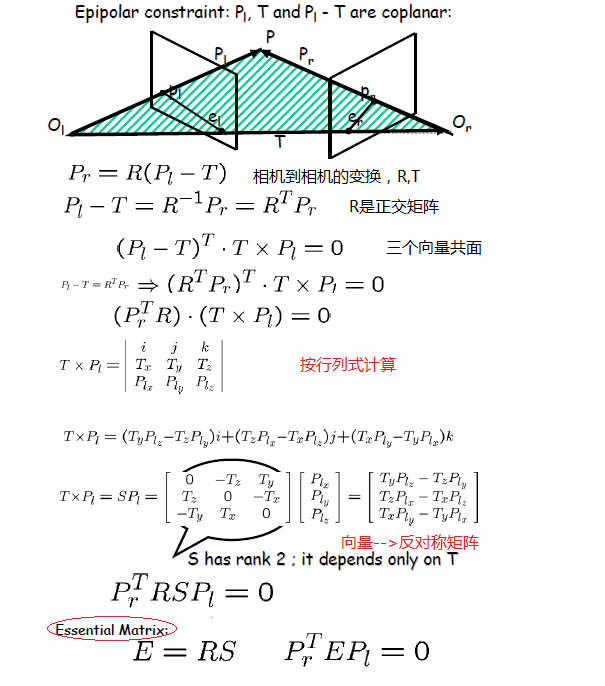
本质矩阵使用摄像机坐标系,通过相机的R&T即可描述,为了使用图像坐标,需要考虑相机内参,由此引入了基础矩阵的概念。
基础矩阵是一个齐次矩阵,秩为2,自由度为7.
基础矩阵的推导过程:

本质矩阵和基础矩阵都是3X3的矩阵。
本质矩阵是一个齐次矩阵,秩为2,自由度为5
本质矩阵的推导过程:
本质矩阵使用摄像机坐标系,通过相机的R&T即可描述,为了使用图像坐标,需要考虑相机内参,由此引入了基础矩阵的概念。
基础矩阵是一个齐次矩阵,秩为2,自由度为7.
基础矩阵的推导过程:
 894
4036
894
4036

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























