







 本文档详细介绍了如何在 Ubuntu 18.04 虚拟机中为 PX4 2.4.8 硬件更新固件。首先,通过配置和编译源代码确保一切准备就绪,然后通过 USB 连接烧写代码到硬件。烧写完成后,通过串口检查版本号和使用 Mission Planner 验证飞控正常工作,确保固件更新成功。
本文档详细介绍了如何在 Ubuntu 18.04 虚拟机中为 PX4 2.4.8 硬件更新固件。首先,通过配置和编译源代码确保一切准备就绪,然后通过 USB 连接烧写代码到硬件。烧写完成后,通过串口检查版本号和使用 Mission Planner 验证飞控正常工作,确保固件更新成功。
系统为虚拟机安装 Ubuntu18.04.1,硬件为 px4 2.4.8
执行指令参考 https://github.com/ArduPilot/ardupilot/blob/master/BUILD.md
1,接上一篇文章,源码准备好之后配置硬件信息
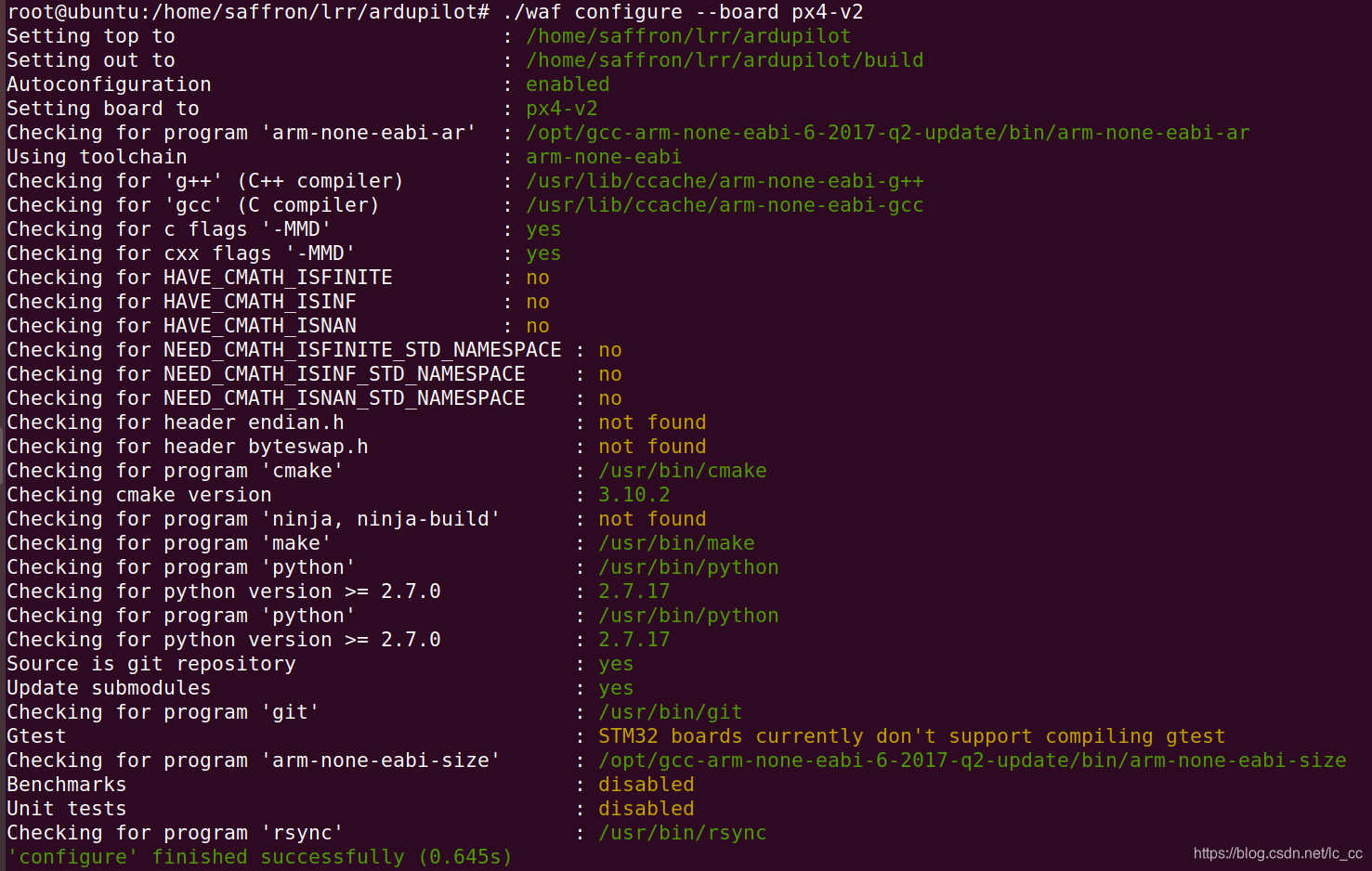
./waf configure --board px4-v2
查看配置是否成功,查看反馈信息
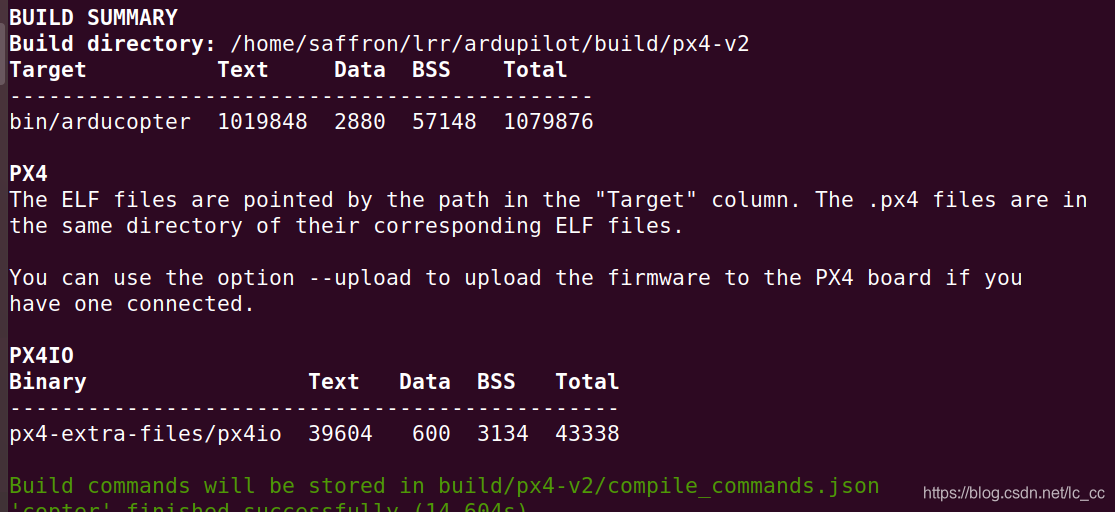
2,编译源代码,执行指令
./waf copter查看编译结果是否正常,出现下述画面时,表示编译成功可以执行下一步骤。
3,将代码烧写到硬件之中,通过 px4 的 USB 接口连接到系统,然后执行下载指令
./waf --targets bin/arducopter --upload下载过程中,可能出现需要 USB 重新插拔现象,不用理会就行,直到下载完成,出现如
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2945
2945

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









