







 本文介绍了如何利用COLMAP工具进行多视角三维重建,包括相机位姿估计和初步的稀疏重建。通过特征匹配计算相机内外参数,结合多视角照片实现数据可视化。文中提供了操作步骤,从选择工作区、指定图像路径到执行自动重建和新建项目,最终得到三维位置的观测点分布。
本文介绍了如何利用COLMAP工具进行多视角三维重建,包括相机位姿估计和初步的稀疏重建。通过特征匹配计算相机内外参数,结合多视角照片实现数据可视化。文中提供了操作步骤,从选择工作区、指定图像路径到执行自动重建和新建项目,最终得到三维位置的观测点分布。
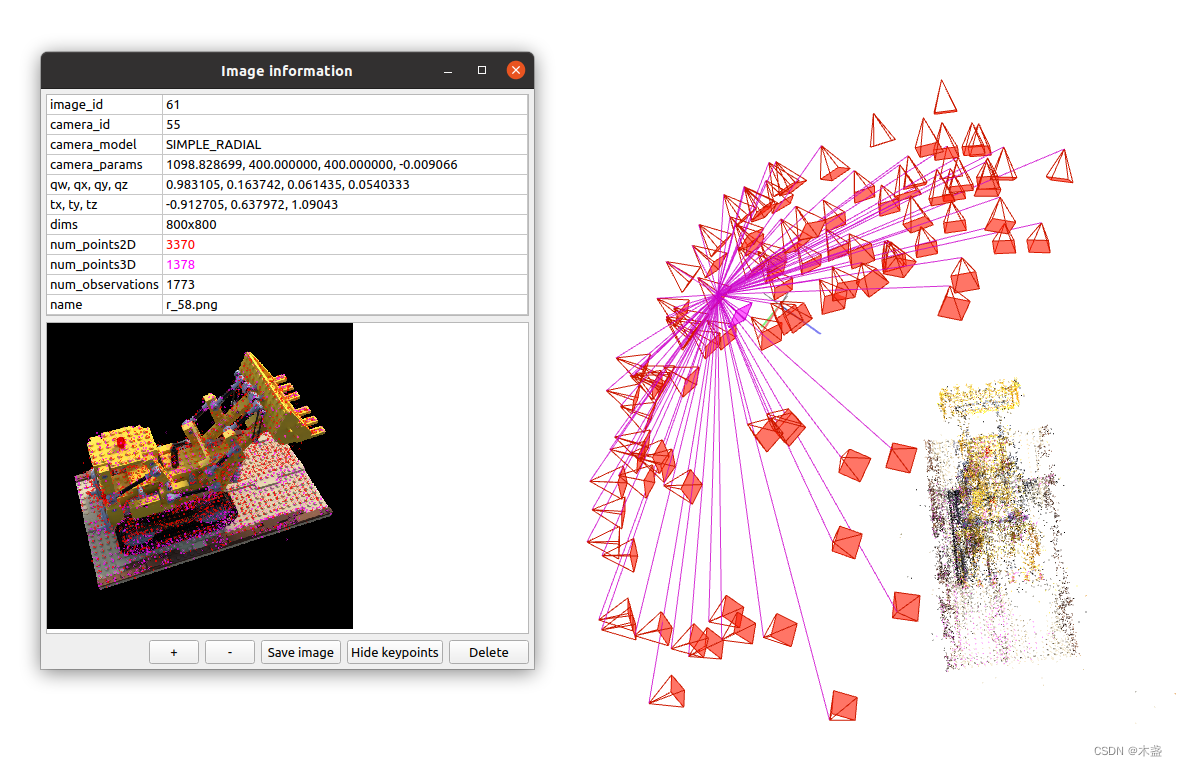
这篇博文主要介绍多视角三维重建的实用工具COLMAP。为了让读者更快确定此文是否为自己想找的内容,我先用简单几句话来描述此文做的事情: 假设我们针对一个物体(人)采集了多个(假设60个)视角的照片,希望用COLMAP实现:(1)通过不同视角之间的特征匹配算出每个视角的相机位资(内外参);(2) 对物体进行初步的稀疏重建,完成多视角数据的可视化(详见图3)。
参考链接:(官方)
Github: https://github.com/colmap/colmap
Tutorial: https://colmap.github.io/
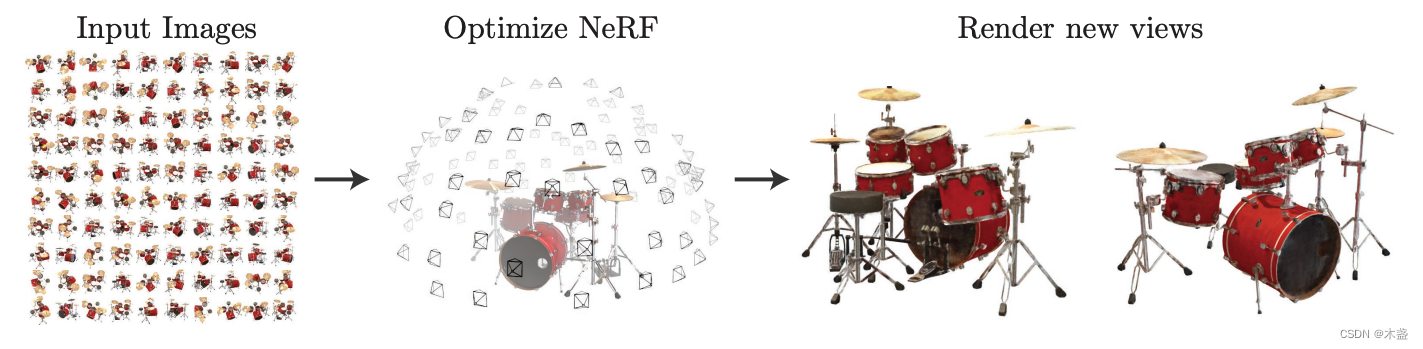
随着NeRF在新视角合成的爆火,多视角三维重建迎来了两年多的蓬勃发展。
废话不多说,我们先得到多视角的图像: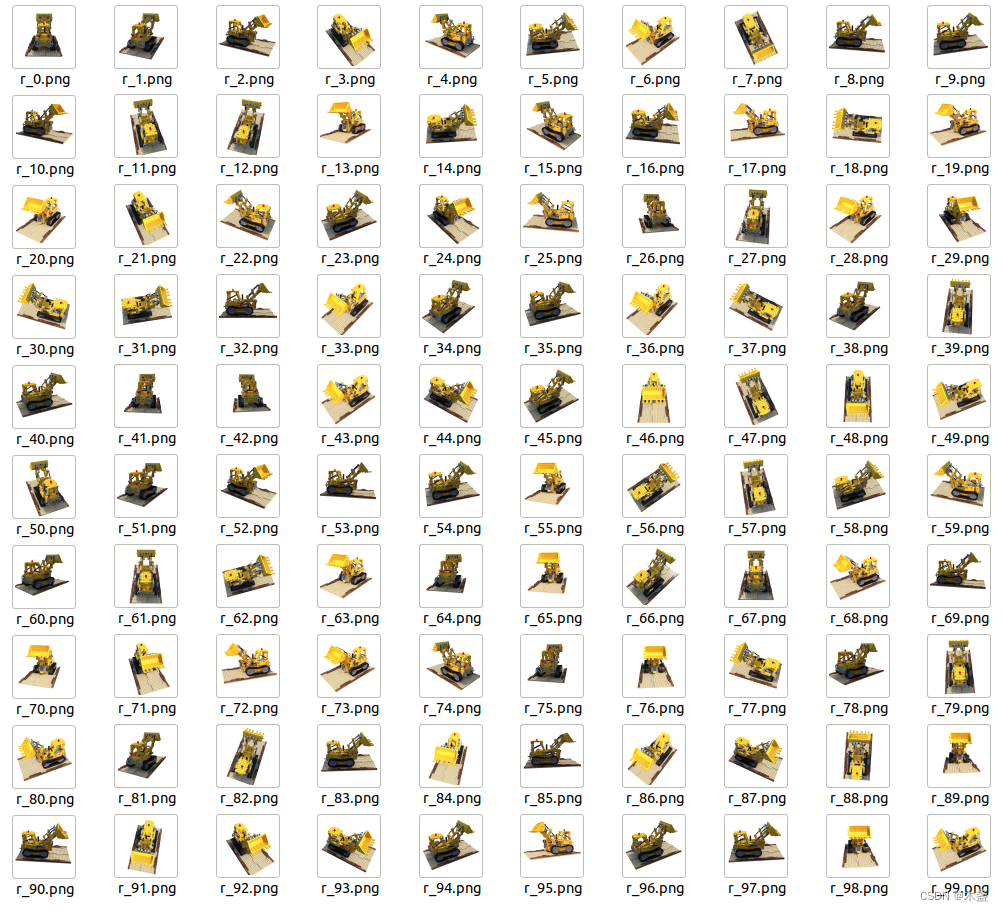
现在我把如何从一组图片中得到图3结果的步骤描述一下:
(1)打开COLMAP界面,点击Reconstruction->Automatic reconstruction,得到下列输入框:
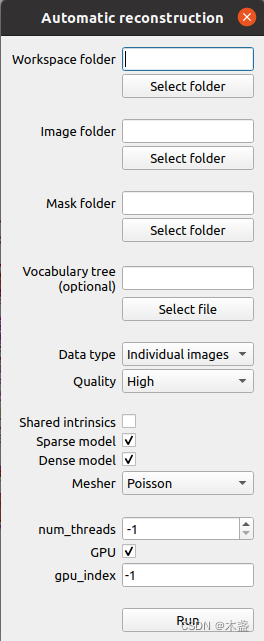
图4 COLMAP操作图
(2) 在图4的对话框中,选定一个workspace路径(可自定义),再明确图像路径(存放多视角图像的路径)。然后把Dense model的对勾去掉,点击Run即可。完成这一步操作后,COLMAP会在workspace路径下生成一个
database.db文件。如果这步完成没得到图3结果,可继续做进行第(3)步;
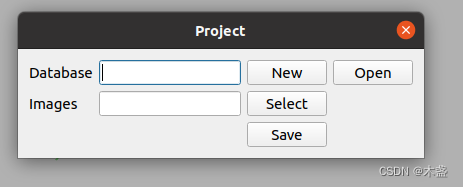
(3)左上角点击
File->New Project,选定database为第(2)步生成出的
database.db,选定images为图像路径。点击save即可。
然后点击左上角运行。即可得到图3结果。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











