







**
玩转Matlab-Simscape(初级)- 04 - 二级摆建模与分析
**
前言
在产品开发中,多体动力学控制仿真是一种常见方法,本文从初学者的角度一步一步学习和应用Maltab simscape对多体进行仿真。写这篇博文是为后续做旋翼无人机的多体系统仿真打基础。欢迎各位小伙伴关注、赞赞、留言和收藏。本文将介绍如何使用Simscape Multibody 对二级摆进行建模和分析。
一、模型概述
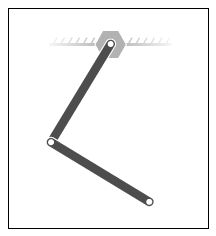
二级摆是一个简单的运动链,由两个摆杆+1个座构成,它们通过两个铰链关节头串联在一起。固定座代表机械接地,与惯性世界坐标系刚性连接。
二、建模过程
- 2.1 新建一个模型
- 2.2 拖入所需模块

- 2.3 将玩转Matlab-Simscape(初级)- 01 - 从一个简单模型开始学习之旅中自定义的摆杆模块,拖入模型中,并连线。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1973
1973

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











