









iNav开源代码之Aocoda-RC F405V2 Mark4 7" PNP适配
1. 源由
做个简单的Aocoda-RC F405V2 Mark4 7"适配过程记录,本人并不推荐去飞iNav目前这个最新版本的inav 6.1.1固件。
据说是已经修复,但是目前(截止发稿日)还没有放出稳定的发布版本,可能在内测中。
2. 安装
模拟套机的配置清单如下:
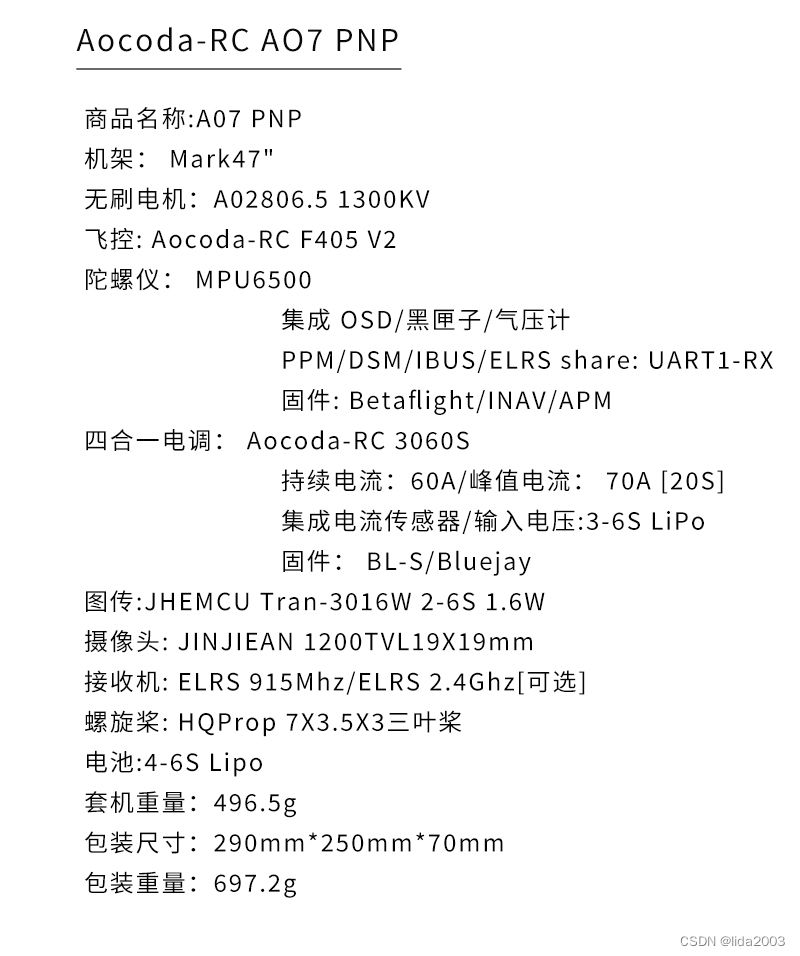
PNP整机主要是焊接一个接收机,其他基本上都是焊接到位的,不过上手固件之前,请确认接线是否正确!!!

2.1 安装地面站
截止发稿日,最新地面站软件版本:INAV Configurator 6.1.0
安装方法详见链接:Windows/Linux/Mac
2.2 固件烧录
截止发稿日,最新inav 6.1.1固件。
固件烧录一共8个步骤+1个确认:
- Step 1:确认inav configurator版本号
- Step 2:选择【Firmware Flasher】选项页
- Step 3:选择目标飞控
- Step 4:选择固件版本
- Step 5:确认整个Flash内容删除
- Step 6:确认飞控DFU烧录模式
- Step 7:下载线上固件二进制版本
- Step 8:烧录固件**
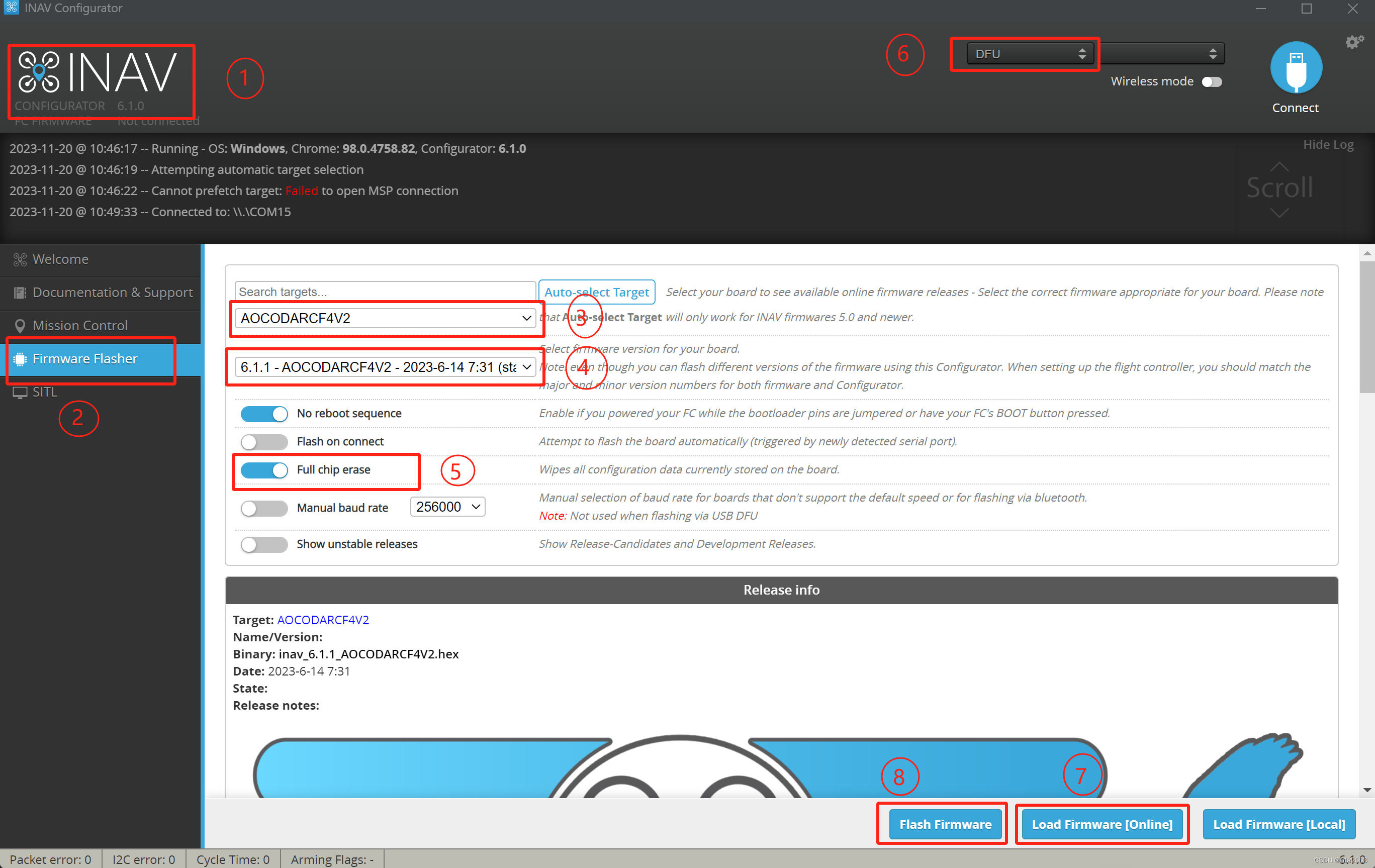
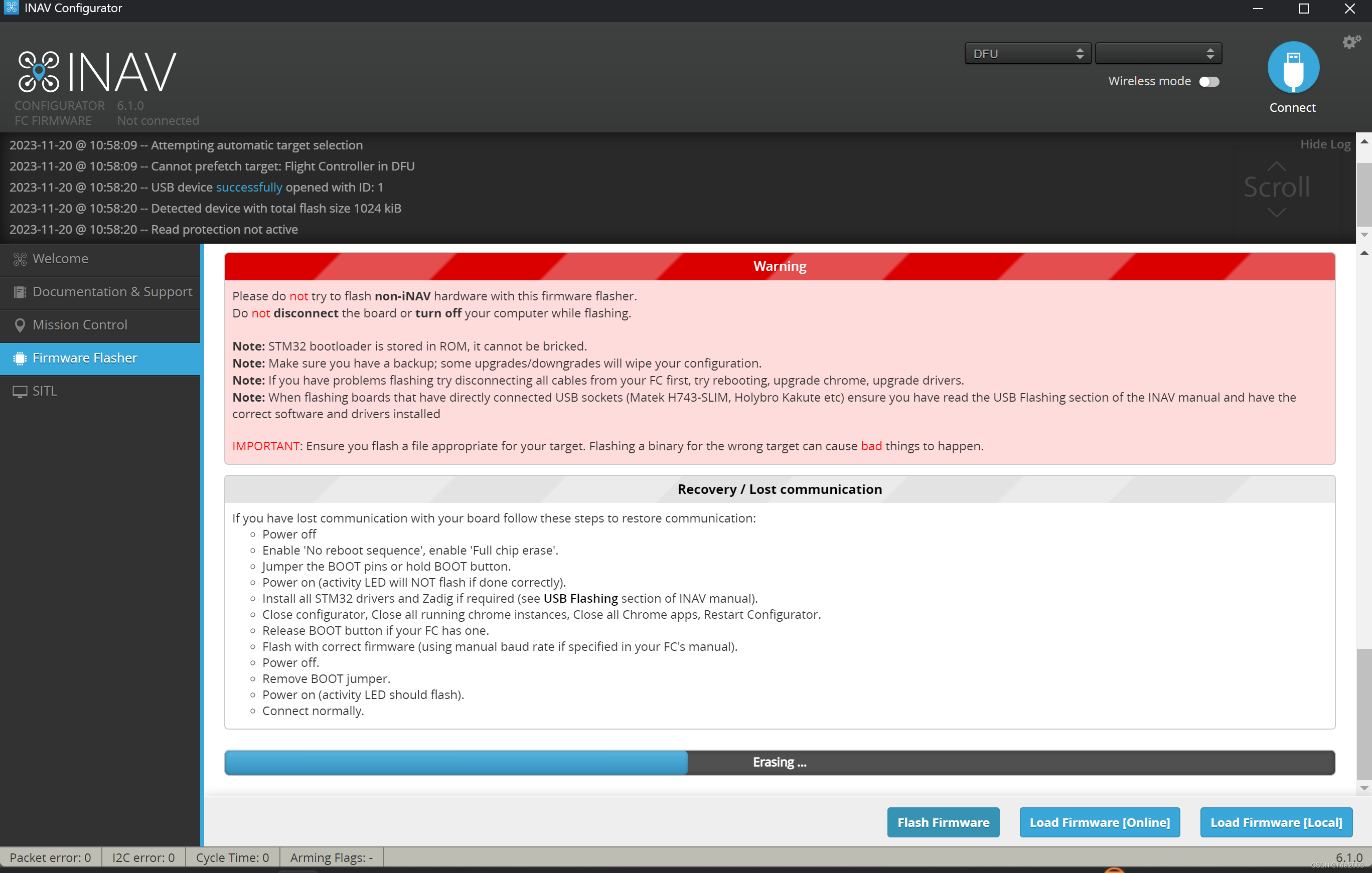
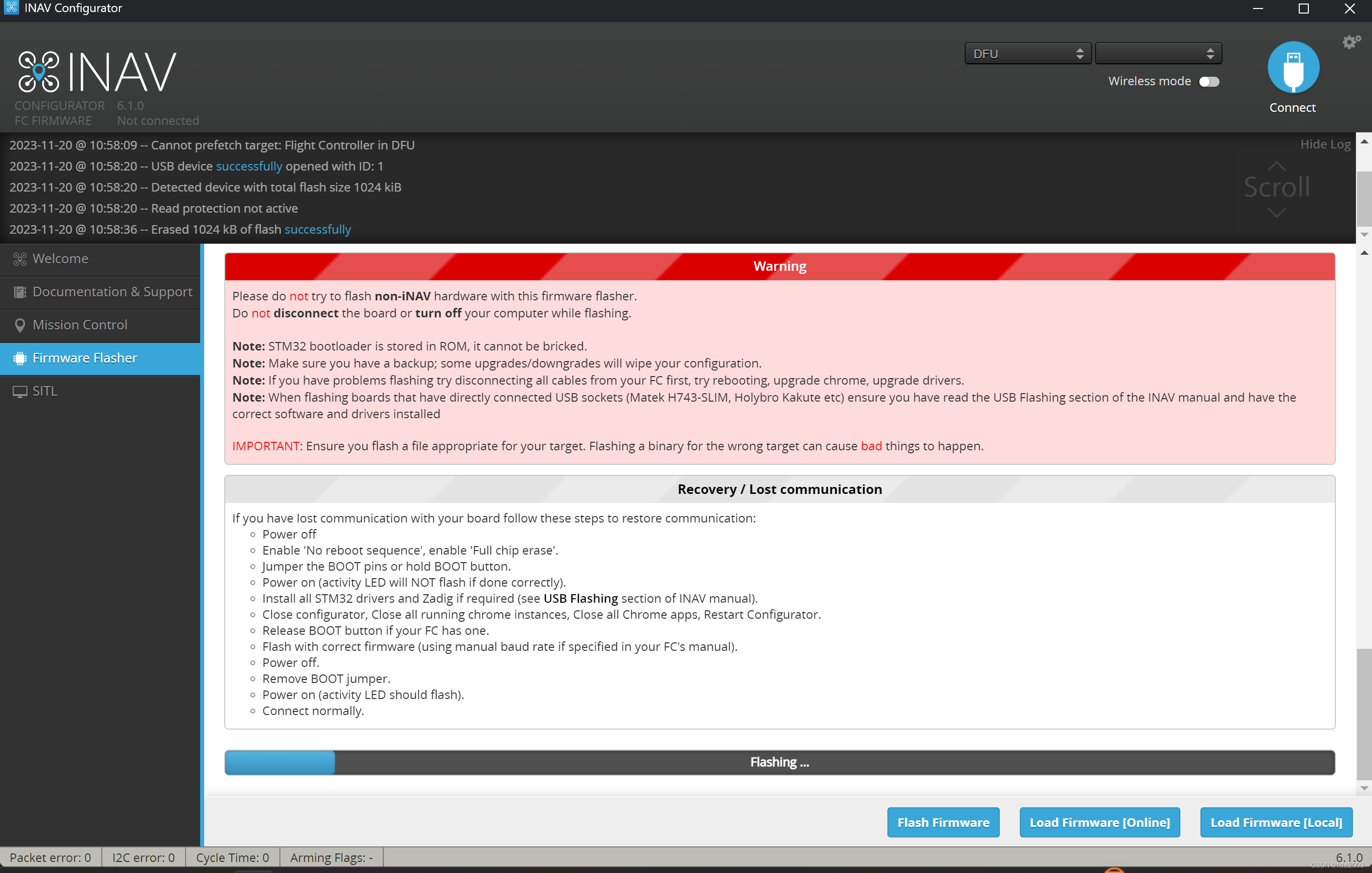
- Final Confirmation:确认烧录成功

2.3 连接飞控
第一次连接,请选择7寸 Mini Quad,确保PID基本正确,至于调优问题,仁者见仁智者见智,需要大家自己摸索。
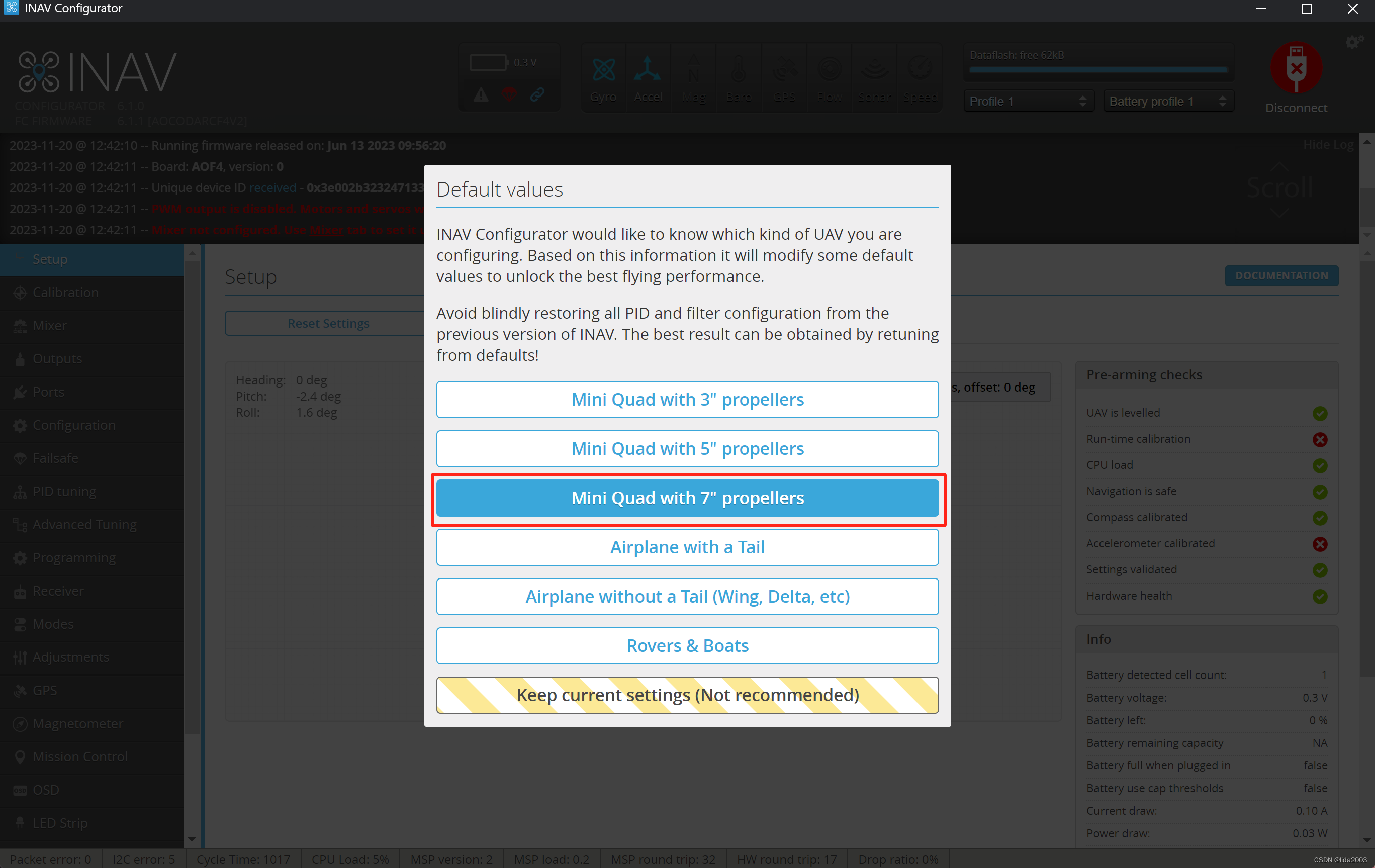 板子保存默认配置重启进入地面站
板子保存默认配置重启进入地面站

3. 配置
硬件安装接线,详见接线图:

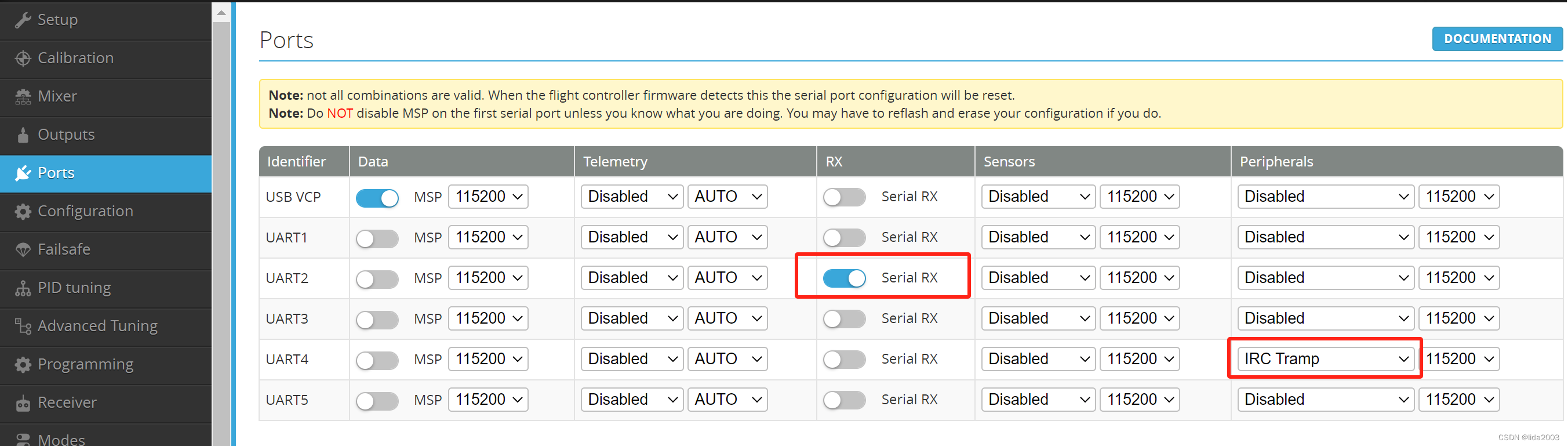
3.1 端口配置
模拟的模拟PNP套机配置如下:
- UART1:无外接设备
- UART2:Receiver
- UART3:无外接设备 //BL-S/Bluejay 无需使用串口3
- UART4:IRC Tramp图传协议
- UART5:无外接设备
注:如果实际硬件有所调整,请适当调整端口配置参数。
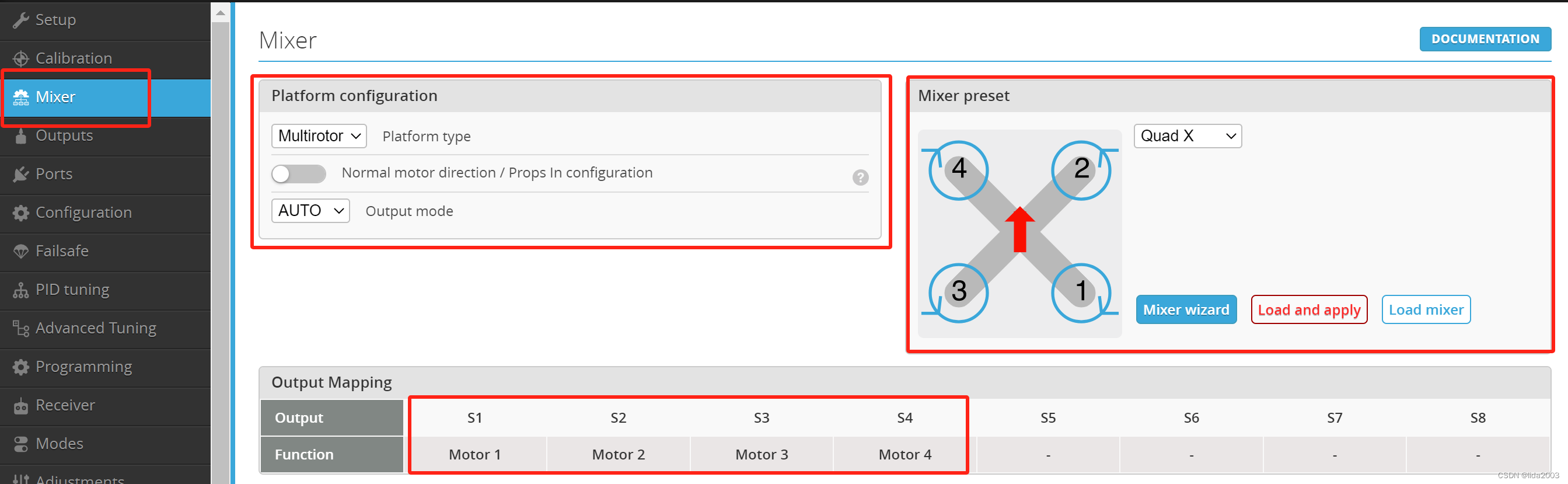
3.2 构型
通常情况来说默认四轴配置如下:
3.3 电调
目前来说,常规dshot600配置,妥妥的。
注:iNav不支持bi-directional dshot,因此,如果飞inav请使用带ESC Telemetry Kiss Protocol协议的电调,以便更好的使用到rpm filter功能。
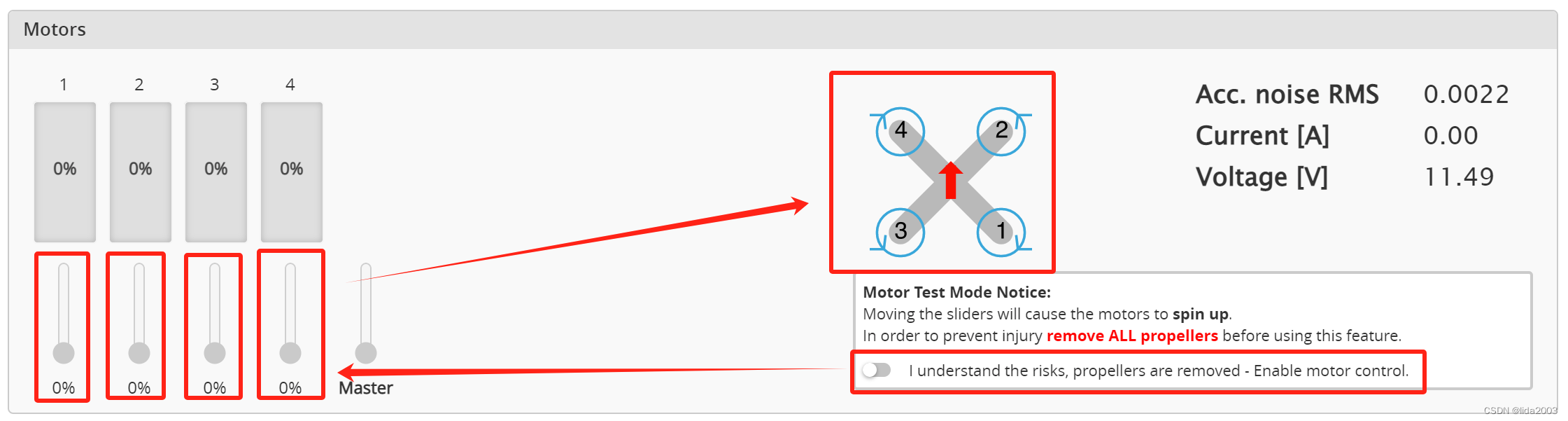
 测试电机转向和顺序:
测试电机转向和顺序:
- 如果电机顺序错了,可能是电调方向异常;
- 如果是电机转向错了,需要再电调固件调整转向参数;
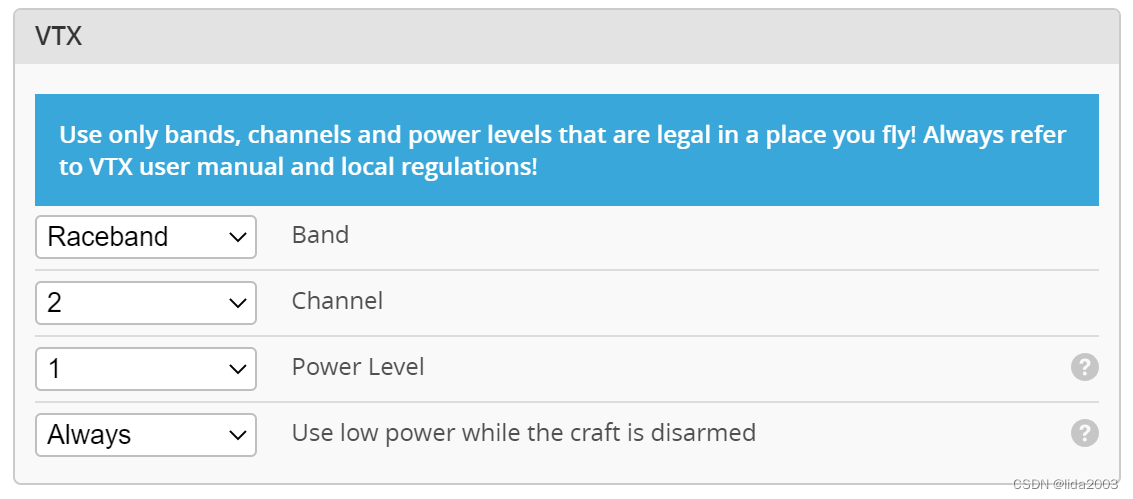
3.4 图传
鉴于这款图传有一些禁用频点,详见:xFlight开源飞控之AT32F435计划。
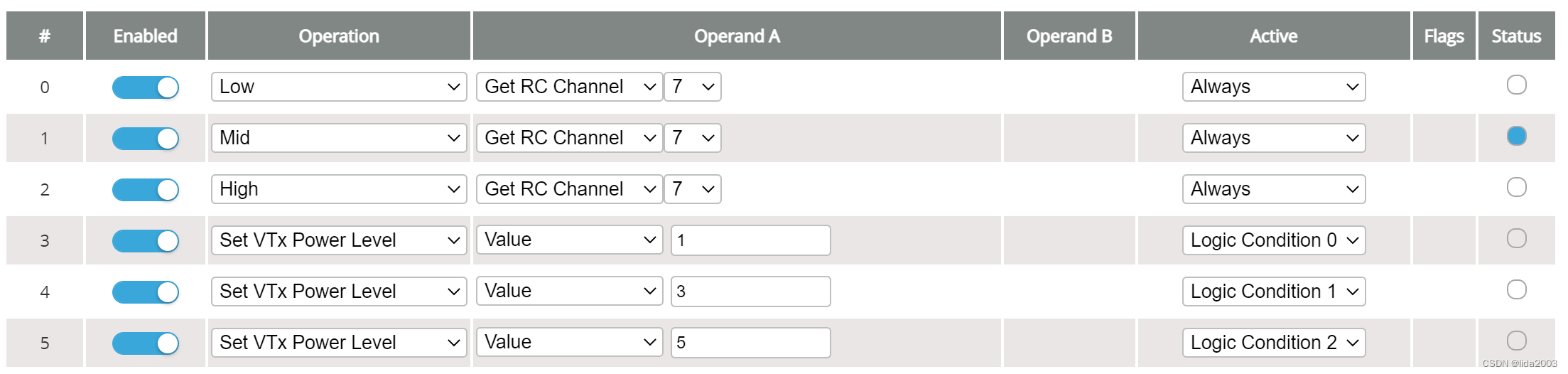
频率设置:R2,默认PowerLevel = 1;
功率设置:不支持1.6W,参考设置1(25mW )/3(200mW)/5(800mW)。
从目前代码看, JHEMCU RuiBet Tran-3016W 5.8GHZ 1.6W尚未得到inav支持到1.6W设置。
const uint16_t trampPowerTable_5G8_200[VTX_TRAMP_5G8_MAX_POWER_COUNT] = { 25, 100, 200, 200, 200 };
const char * const trampPowerNames_5G8_200[VTX_TRAMP_5G8_MAX_POWER_COUNT + 1] = { "---", "25 ", "100", "200", "200", "200" };
const uint16_t trampPowerTable_5G8_400[VTX_TRAMP_5G8_MAX_POWER_COUNT] = { 25, 100, 200, 400, 400 };
const char * const trampPowerNames_5G8_400[VTX_TRAMP_5G8_MAX_POWER_COUNT + 1] = { "---", "25 ", "100", "200", "400", "400" };
const uint16_t trampPowerTable_5G8_600[VTX_TRAMP_5G8_MAX_POWER_COUNT] = { 25, 100, 200, 400, 600 };
const char * const trampPowerNames_5G8_600[VTX_TRAMP_5G8_MAX_POWER_COUNT + 1] = { "---", "25 ", "100", "200", "400", "600" };
const uint16_t trampPowerTable_5G8_800[VTX_TRAMP_5G8_MAX_POWER_COUNT] = { 25, 100, 200, 500, 800 };
const char * const trampPowerNames_5G8_800[VTX_TRAMP_5G8_MAX_POWER_COUNT + 1] = { "---", "25 ", "100", "200", "500", "800" };
const uint16_t trampPowerTable_1G3_800[VTX_TRAMP_1G3_MAX_POWER_COUNT] = { 25, 200, 800 };
const char * const trampPowerNames_1G3_800[VTX_TRAMP_1G3_MAX_POWER_COUNT + 1] = { "---", "25 ", "200", "800" };
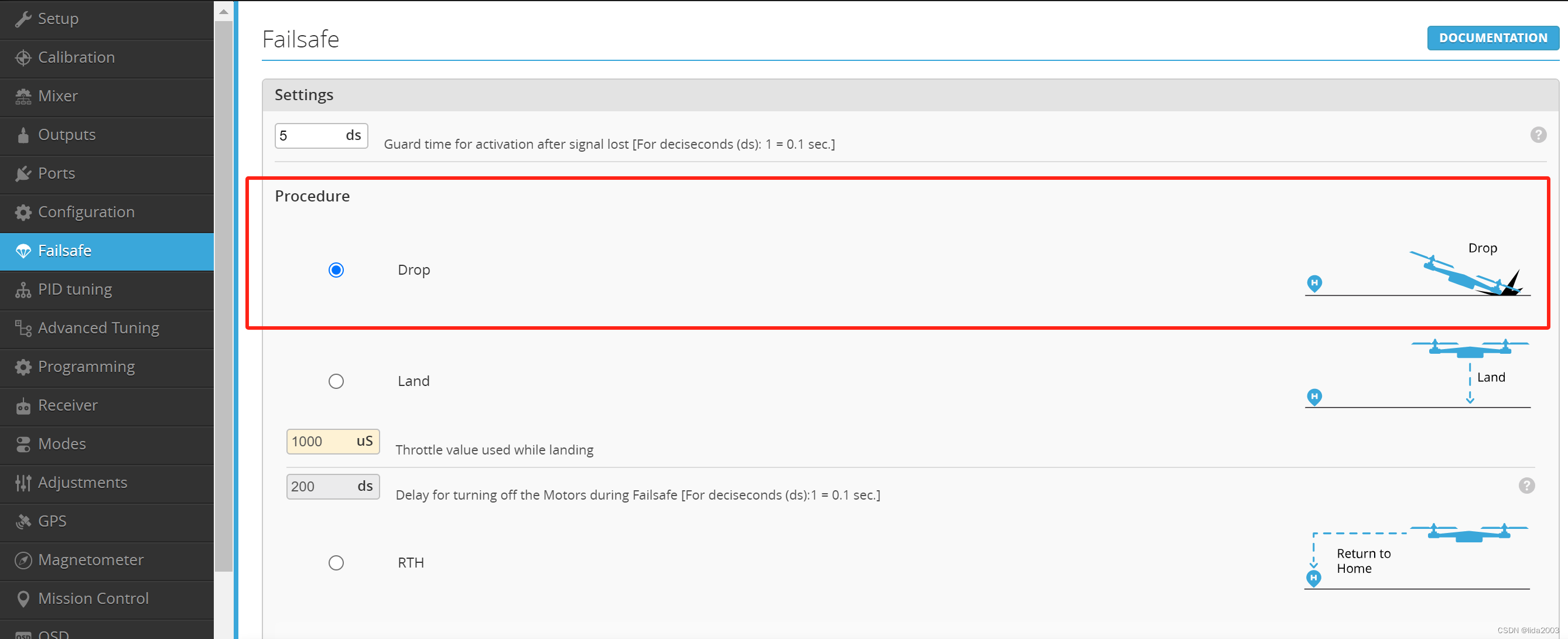
3.5 Failsafe
没有GPS等额外配置,妥妥的穿越机飞行,没信号就直接上锁,防止二次伤害。
注:想要高级功能的,请参考:iNav开源代码之H743+BMI270x2配置适配。
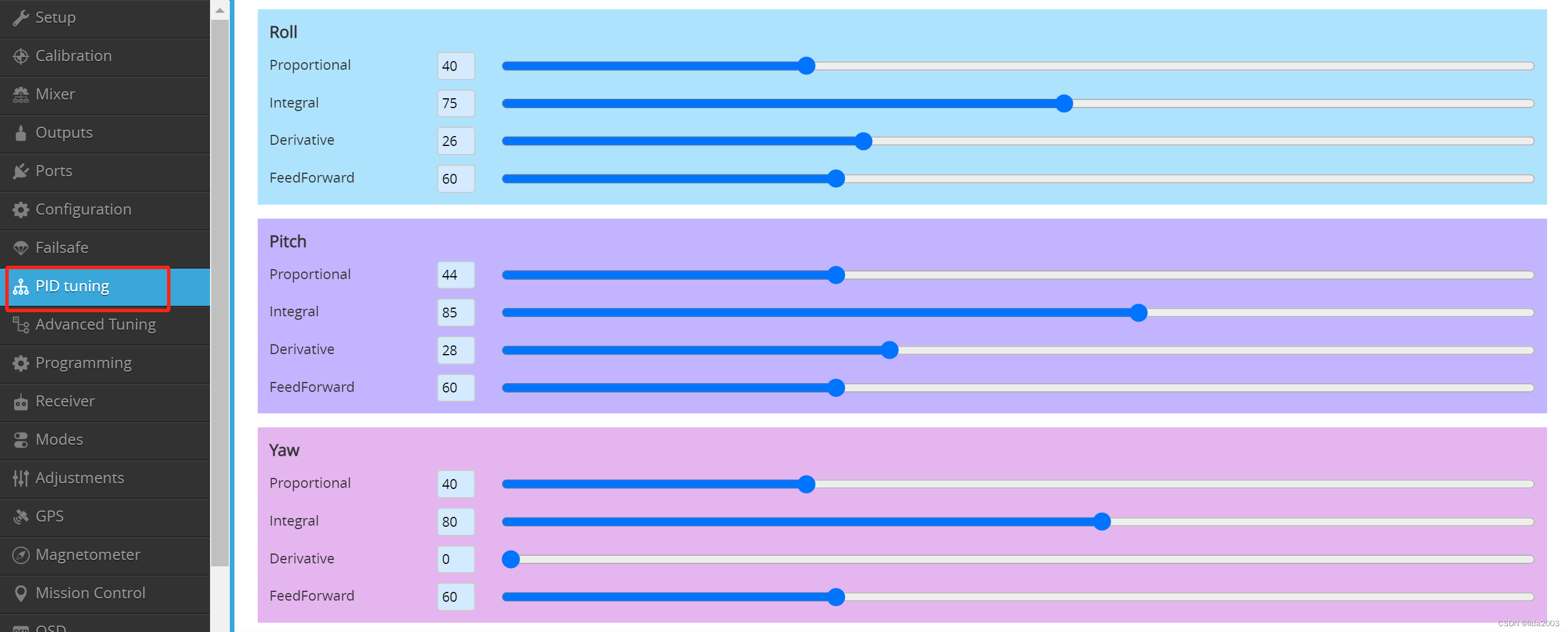
3.6 PID
略,之前默认了7寸 PID,需要调优的,以后有空再讲,仁者见仁智者见智问题,不再这里展开。
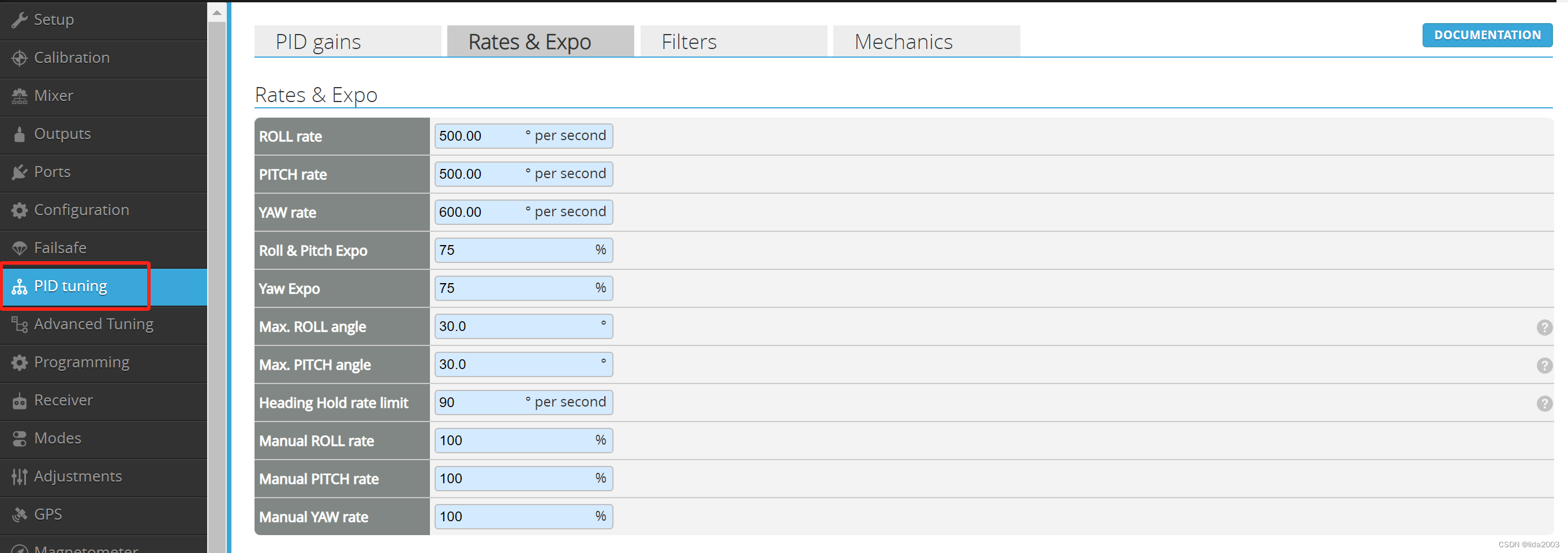
3.7 Rate
笔者飞这个感觉还不错,所以配了500 Rate,因人喜好而已,仅供参考,如有雷同纯属偶然!!!
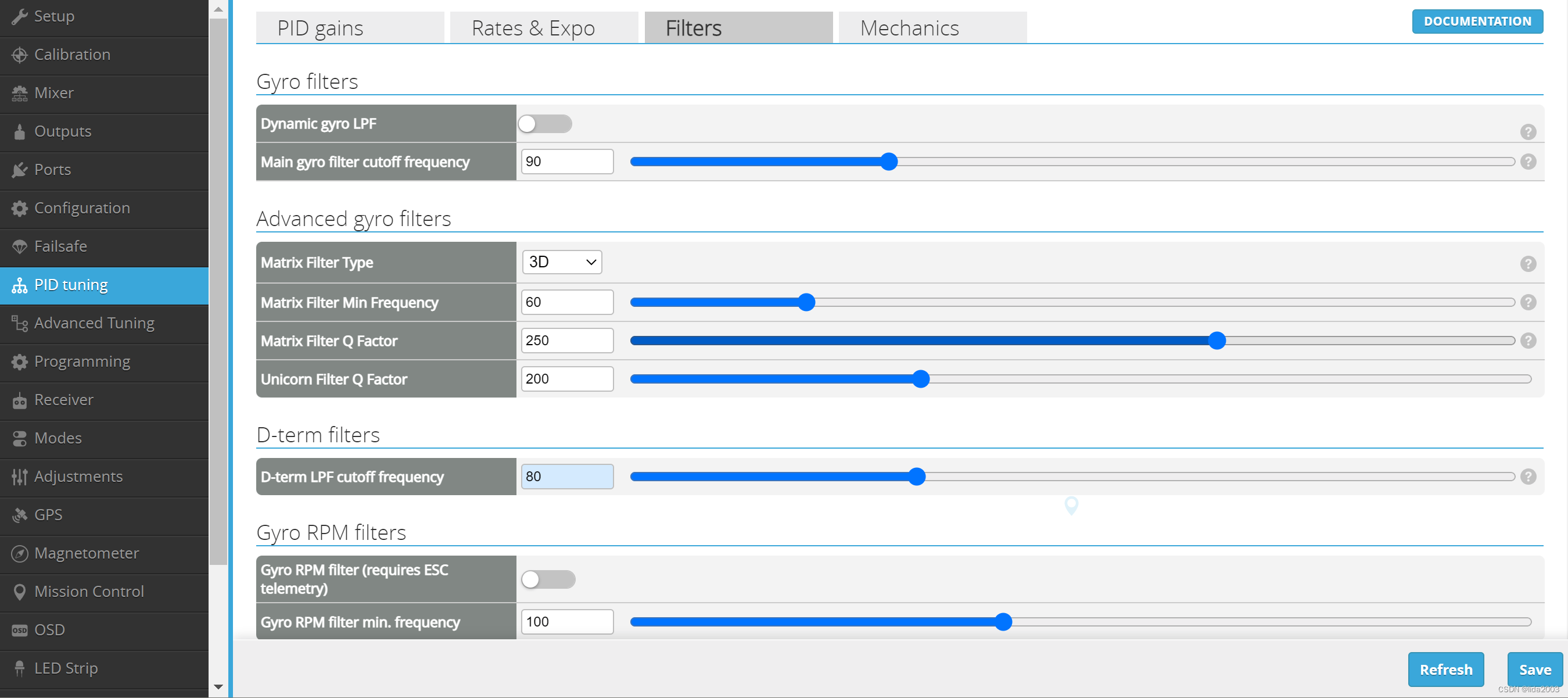
3.8 Filter
默认值
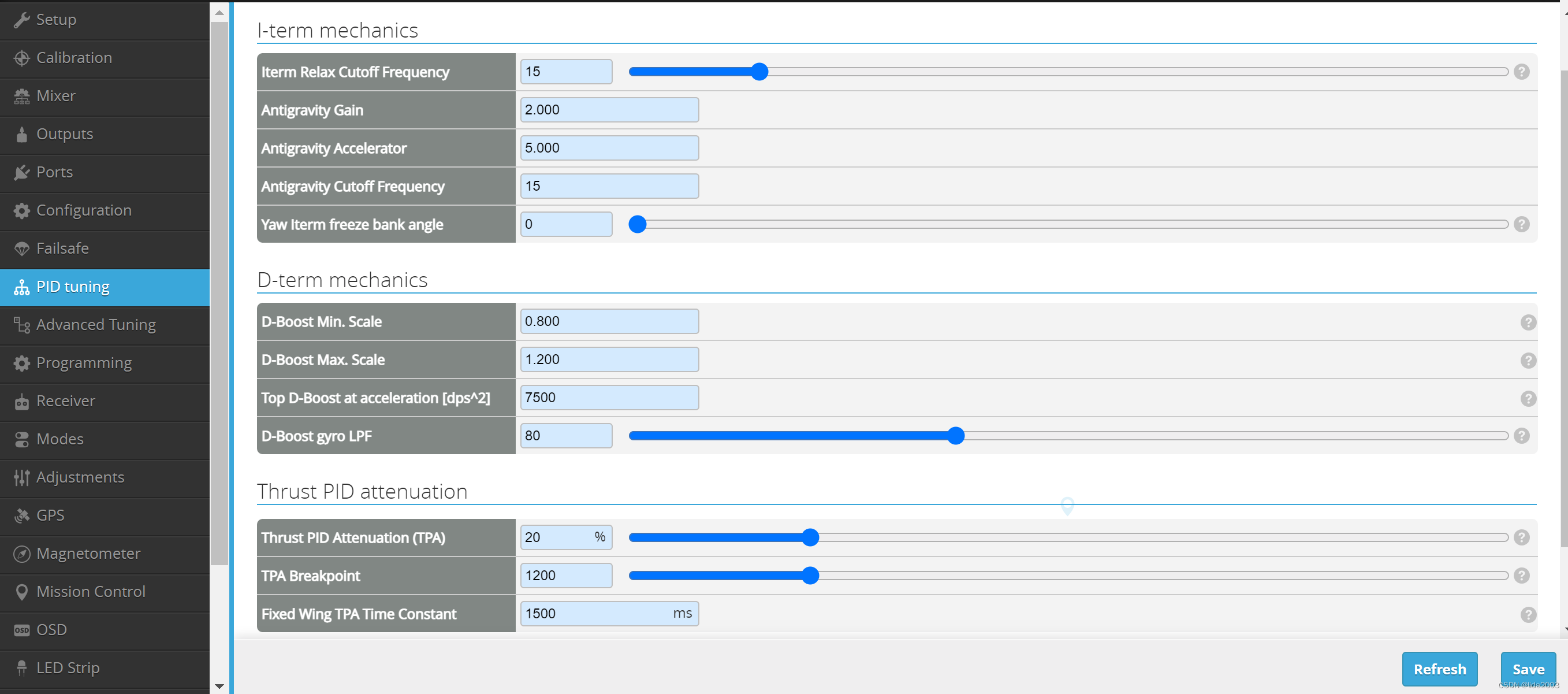
3.9 Mechanics
默认值
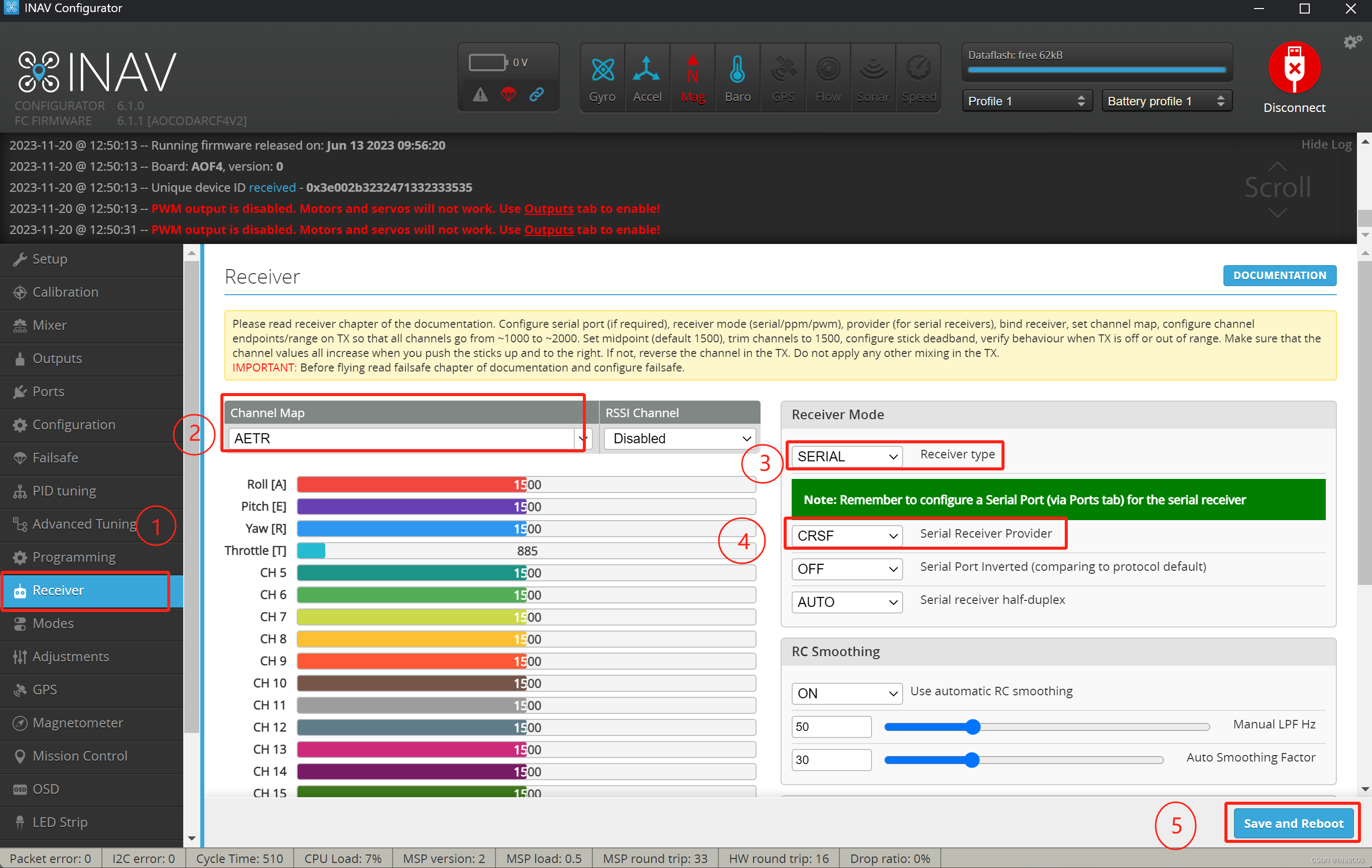
3.10 ELRS 915接收机
- Step 1:选择【Receiver】tab页
- Step 2:确认【AETR】布局
- Step 3:选择【SERIAL】接收机种类
- Step 4:选择【CRSF】协议
- Step 5:保存配置
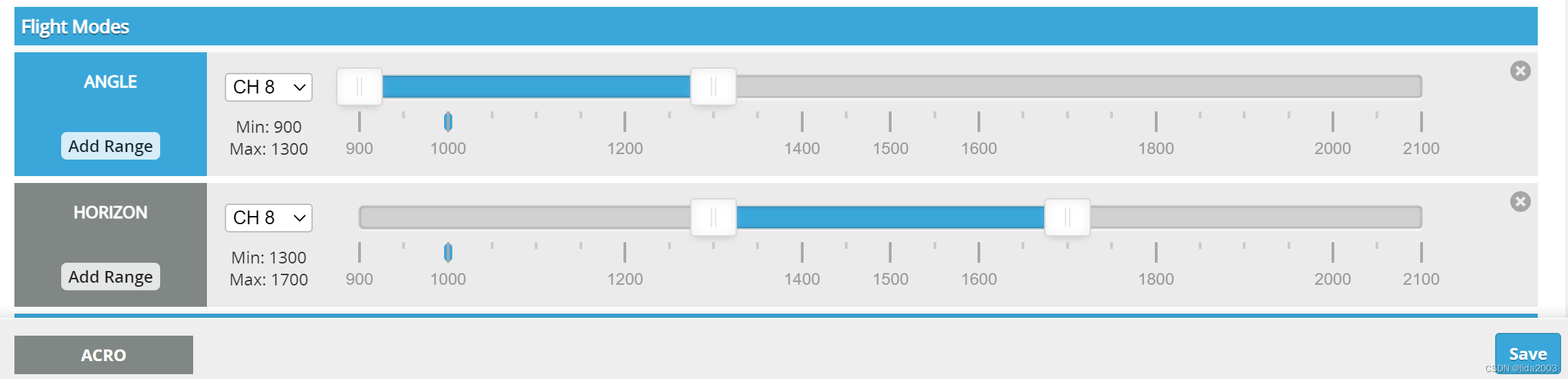
3.11 模式

黑匣子功能
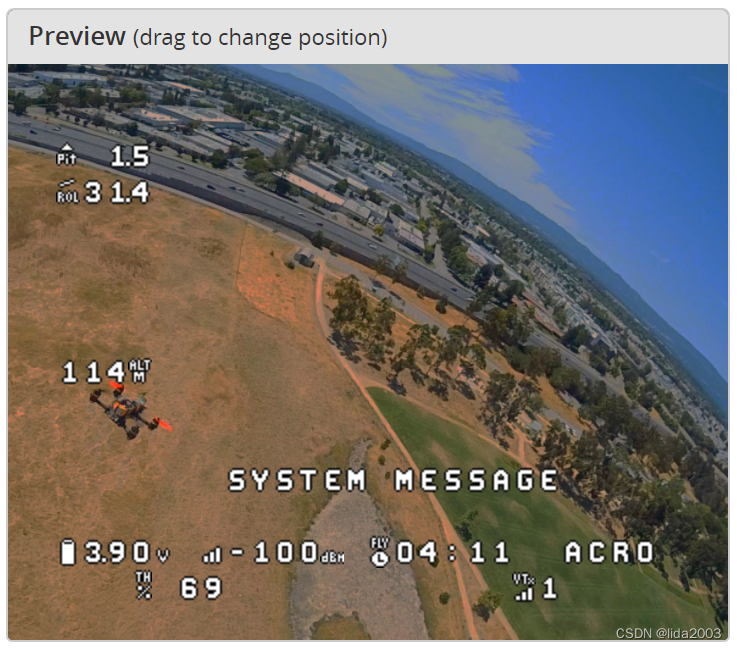
3.12 OSD
基本信息
- 飞行高度
- FPV姿态
- 单Cell电压
- 接收机dbm值
- 飞行时间
4. 总结
4.1 第一次试飞正常
第一次起飞测试:顺利,默认7寸PID基本正常
inav 6.1.1 Aocoda-RC F405V2 Mark4 7“ First Take Off
4.2 【已解决】待查问题
4.2.1 GPS接上,电池供电,飞控串口无法被PC识别
a) 电池供电时,GPS模块5V才能工作
b) GPS 模块上电时,4.5V ELRS 915 工作正常
证明:未发现短路现象
怀疑:无明显怀疑对象
经反复测试:
APM固件:无该问题
解决摄像头问题后,问题依然存在
怀疑:与inav固件 USB驱动部分有关
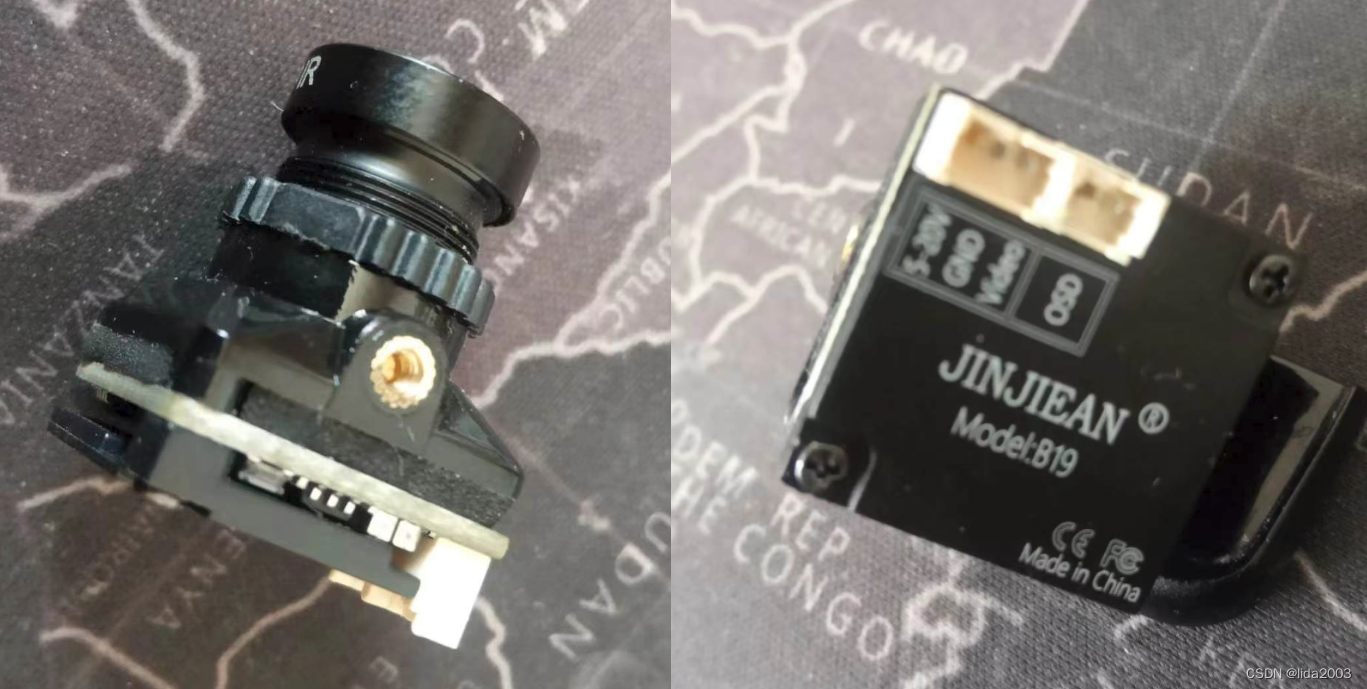
4.2.2 FPV视频无法显示问题
a) 经检查,摄像头接在9V电源上
b) VTX供电正常,且信号能在眼镜端收到
c) 飞控OSD信息能被正确显示
d) 摄像头前方信息无法显示
c) 上午APM飞行时,视频正常,未见异常
怀疑:摄像头故障
测试:更换正常摄像头,故障排除,问题定位
RootCause:摄像头故障
当前现象:
inav 6.1.1 Aocoda-RC F405V2 Mark4 7“ FPV video abnormal
上午视频:
Ardupilot 4.4.3 Aocoda-RC F405V2 Mark4 7“ FPV First Fly
5. 参考资料
【1】xFlight开源飞控之AT32F435计划
【2】iNav开源代码之严重炸机 – 危险隐患
【3】iNav开源代码之H743+BMI270x2配置适配

















 1542
1542

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









